Command Palette
Search for a command to run...
AIウィークリーレポート:マイクロソフト、清華大学、香港大学による最新研究により、汎用エージェント、地理情報システム、ロボティクスにおける新たなブレークスルーが実現
汎用知能エージェントの分野において、AIは単一タスク実行から、推論、マルチモーダルインタラクション、自律学習といった包括的な機能へと移行しつつあります。しかしながら、既存の強化学習による学習手法は、エージェントの実行メカニズムと密接に結びついていることが多く、移行が困難で、システムへの侵襲性が高いという問題があります。
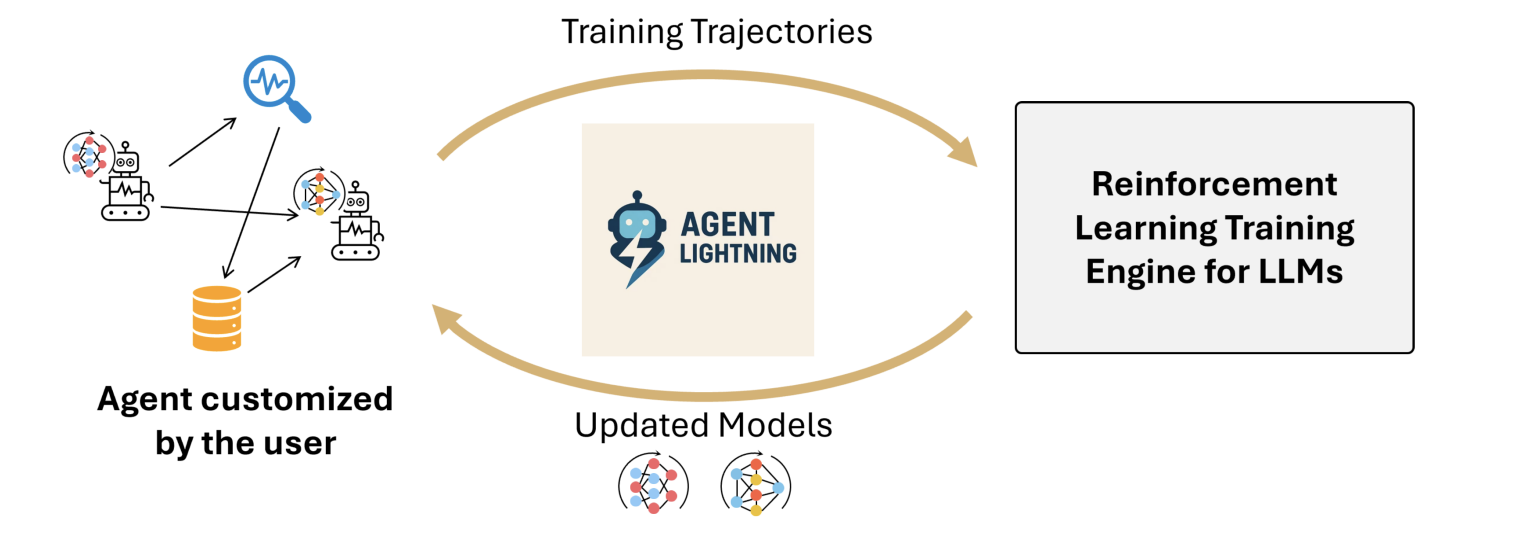
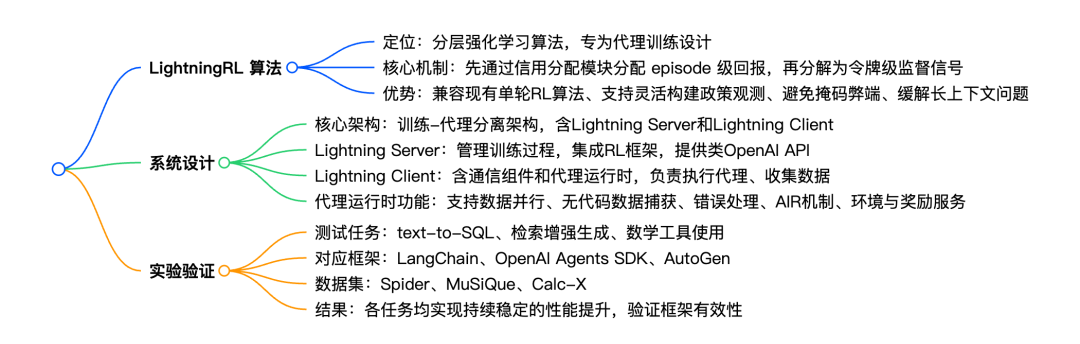
Agent Lightningフレームワークは、こうしたニーズに応える形で登場し、学習と実行の完全な分離を実現しました。これにより、実質的にコードを変更することなく、様々なエージェントアーキテクチャを統合できます。統一されたインターフェースと軌跡分解により、複雑なインタラクションを学習可能なデータに変換し、複数のシナリオにおける柔軟なRLの微調整をサポートします。
ペーパーリンク:https://go.hyper.ai/se37P
最新のAI論文:https://hyper.ai/cn/papers
学術界における人工知能分野の最新動向をより多くのユーザーに知ってもらうため、HyperAI の公式サイト (hyper.ai) に「最新論文」セクションが開設され、最先端の AI 研究論文が毎日更新されます。おすすめのAI論文5選同時に、論文の構成をまとめたマインドマップも作成しました。それでは、今週のAI最先端成果を簡単に見ていきましょう⬇️
今週のおすすめ紙
1 エージェントライトニング: 強化されたAIエージェントをトレーニングする 学ぶ
本論文では、あらゆるAIエージェント向けに強化学習を用いた大規模言語モデルを学習するための、柔軟かつスケーラブルなフレームワーク「Agent Lightning」を提案します。強化学習とエージェントを密結合させたり、マスクされたシーケンスの連結に依存したりする既存のアプローチとは異なり、Agent Lightningはエージェントの実行と学習を完全に分離し、様々な方法で開発された既存のエージェントと、実質的にコードを変更することなくシームレスに統合します。
論文リンク:https://go.hyper.ai/se37P
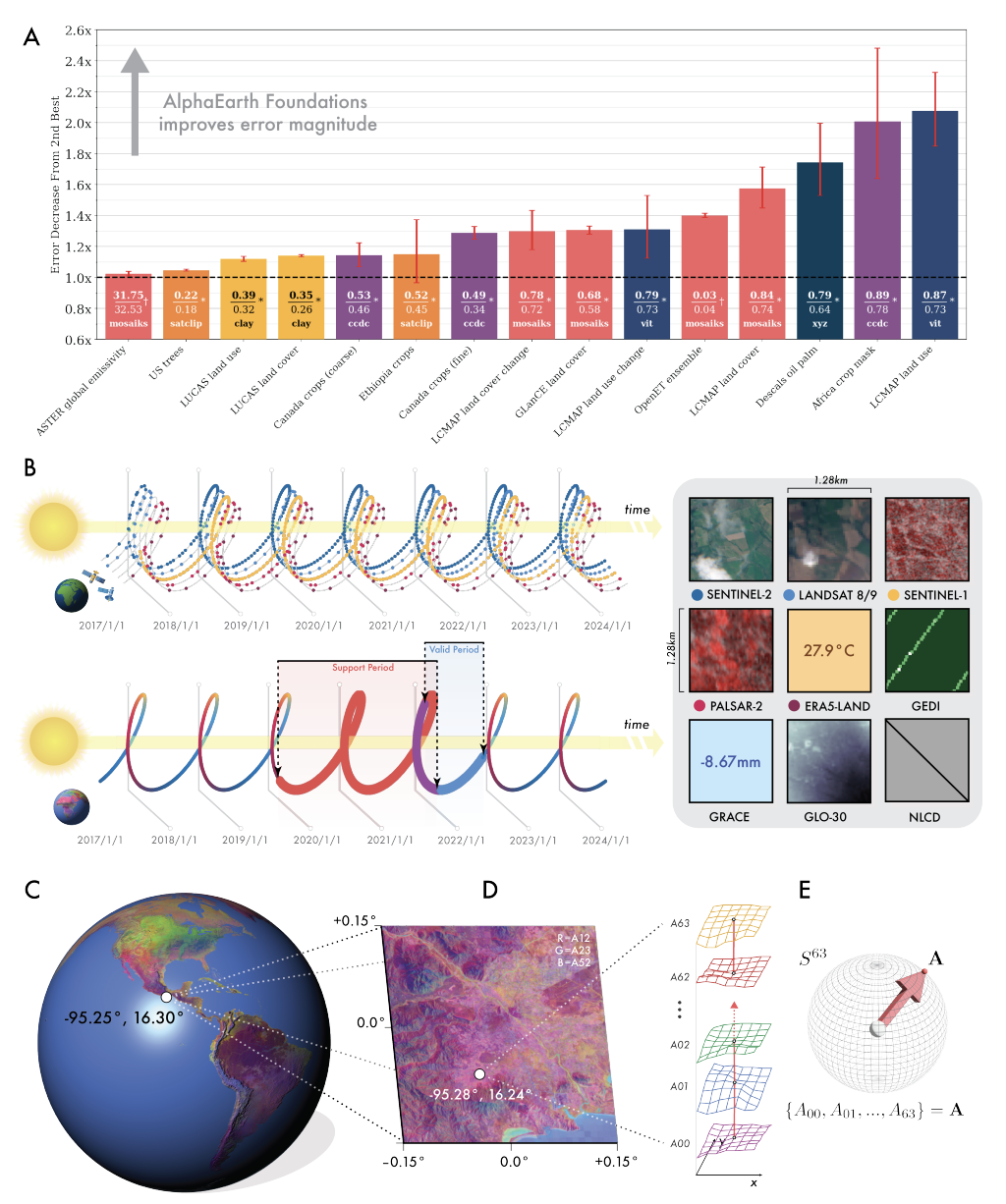
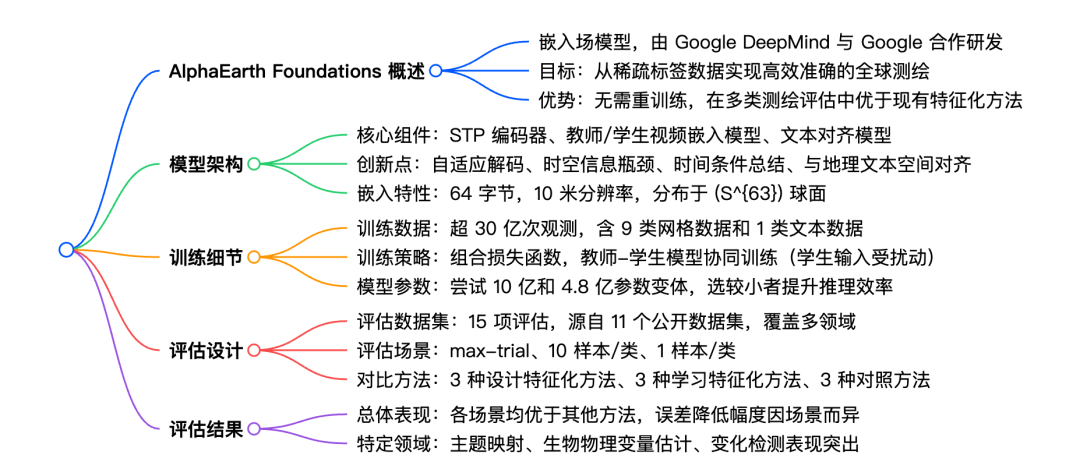
2 AlphaEarth Foundations: 正確で効率的な地球規模の埋め込みフィールドモデル
マッピングから スパースラベルデータ
本論文では、地球観測データを処理するモデル「AlphaEarth Foundations」を紹介します。このモデルは、スパースな注釈データから地球規模の地図と監視システムを効率的かつ正確に生成するように設計されています。このモデルは、多様な情報源から得られる空間、時間、および測定データ間の関係性を学習し、普遍的な地理空間表現を生成します。このモデルは、再学習なしで、様々な地図評価タスクにおいて、従来のあらゆる特徴量化手法を上回る性能を発揮します。
論文リンク:https://go.hyper.ai/HSPlS
衛星埋め込み地球観測データセット:https://go.hyper.ai/WTpjt
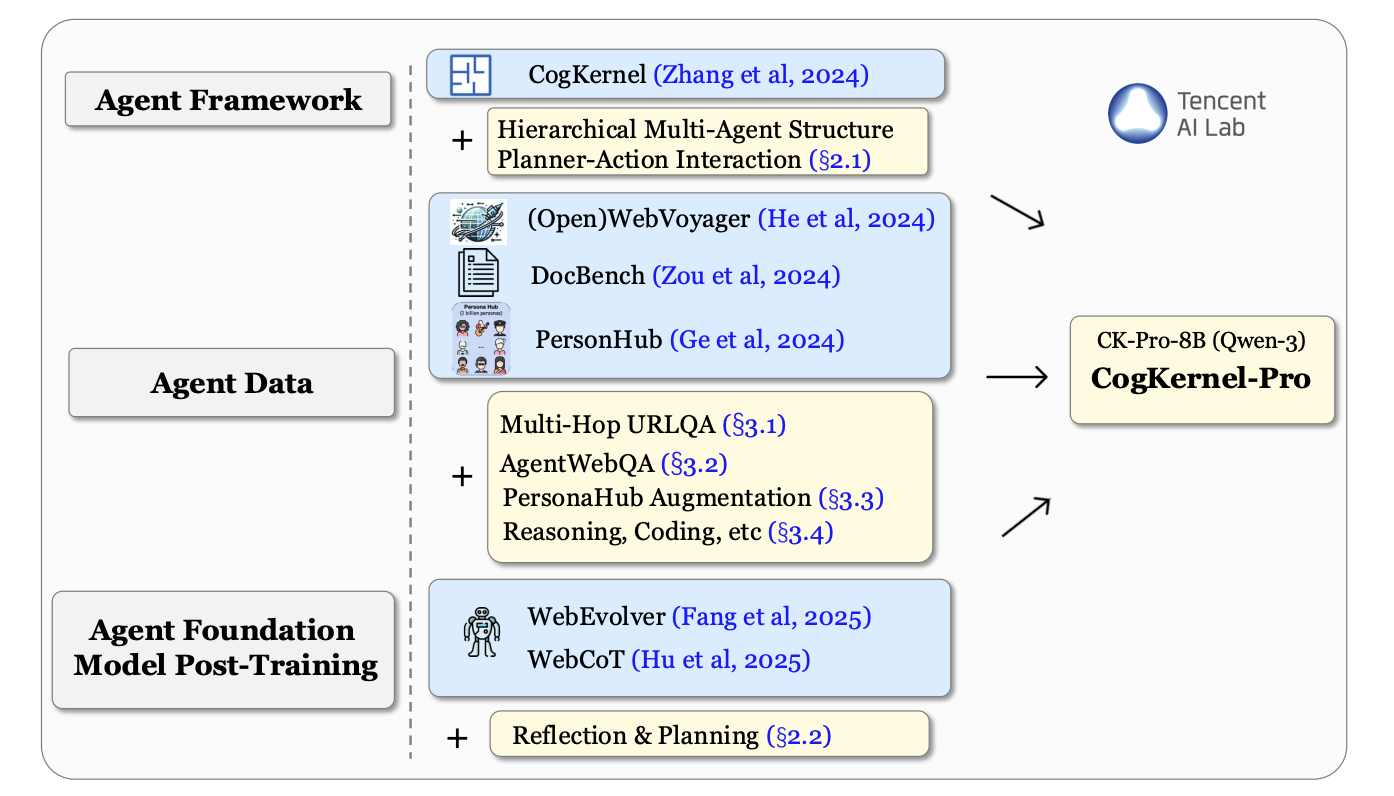
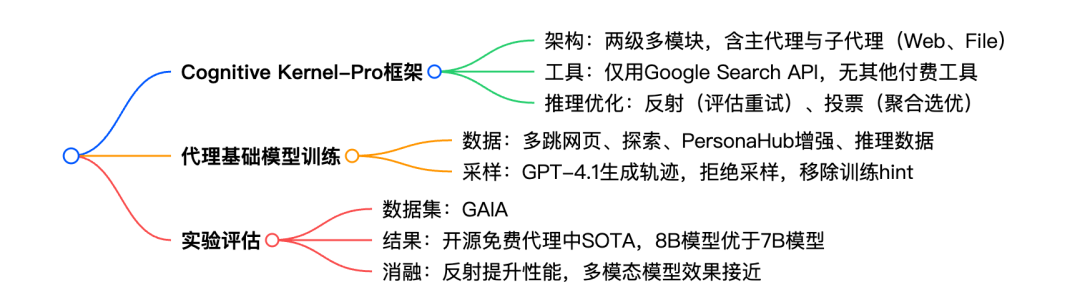
3 Cognitive Kernel-Pro: ディープラーニングエージェントとエージェント基盤モデルのトレーニングのためのフレームワーク
本稿では、高度なAIエージェントの開発と評価を民主化するために設計された、完全にオープンソースで、ほぼ無料のマルチモジュール型インテリジェントエージェントフレームワークであるCognitive Kernel-Proを紹介します。実験結果では、Cognitive Kernel-Proがオープンソースおよびフリーのエージェントシステムの中で最先端のパフォーマンスを達成し、WebDancerやWebSailorといった従来の主要システムを凌駕していることが実証され、アクセスしやすい高性能AIエージェントの新たなパフォーマンスベンチマークを確立しました。
論文リンク:https://go.hyper.ai/HIS8M
CognitiveKernel-Pro-Query テキスト生成ベンチマークデータセット:https://go.hyper.ai/ofF3N
4 LLMを活用したエージェントによる人間のような学習ダイナミクスのシミュレーション
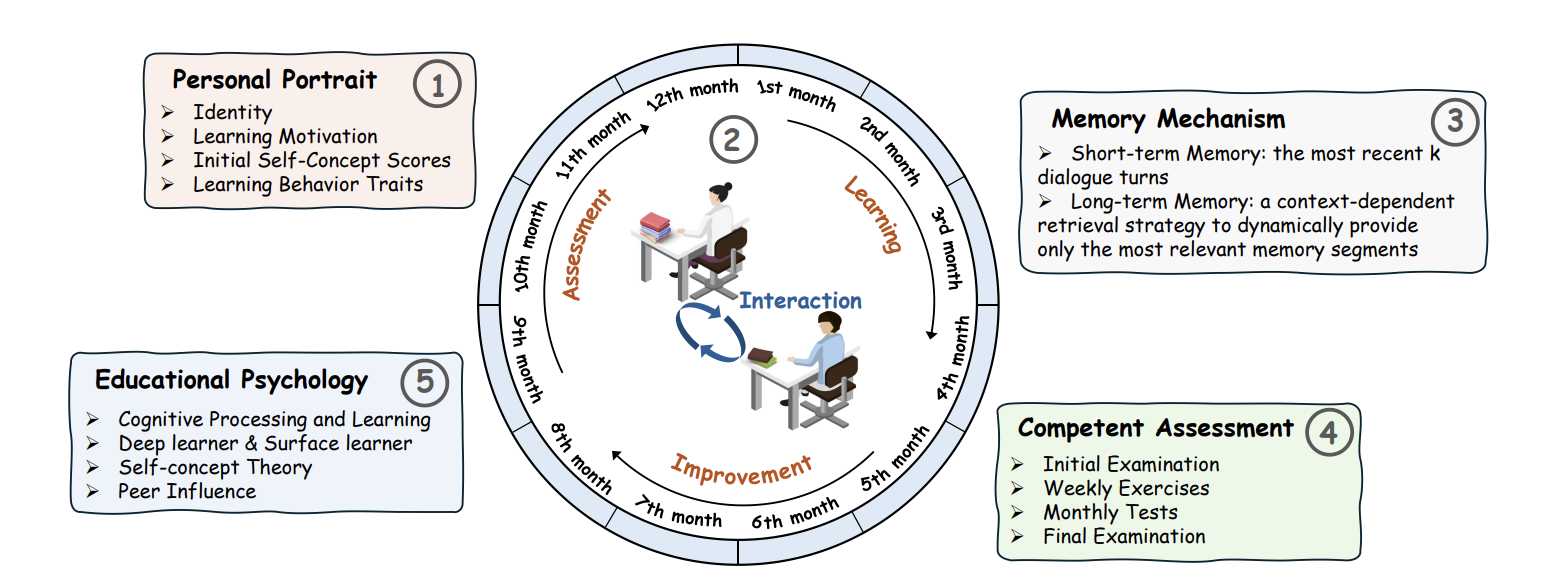
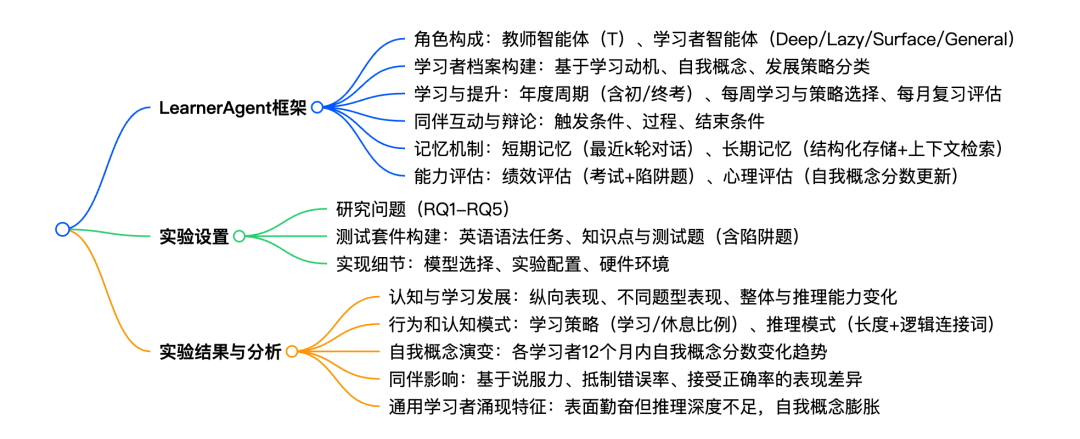
本論文では、大規模言語モデルに基づく、現実的な教育環境をシミュレートするために設計された、新しいマルチエージェントフレームワーク「LearnerAgent」を提案する。人間のような学習のダイナミクスを探るため、研究チームは心理学的知見に基づいた学習者プロファイルを構築するとともに、プロファイルを持たない一般的な学習者を準備し、基盤となるLLMのデフォルト動作をテストした。週ごとの知識獲得、月ごとの戦略選択、定期的なテスト、そして仲間との交流をシミュレートすることで、研究チームは1年間にわたり学習者の動的な学習過程を追跡することに成功した。
論文リンク:https://go.hyper.ai/GbGs2
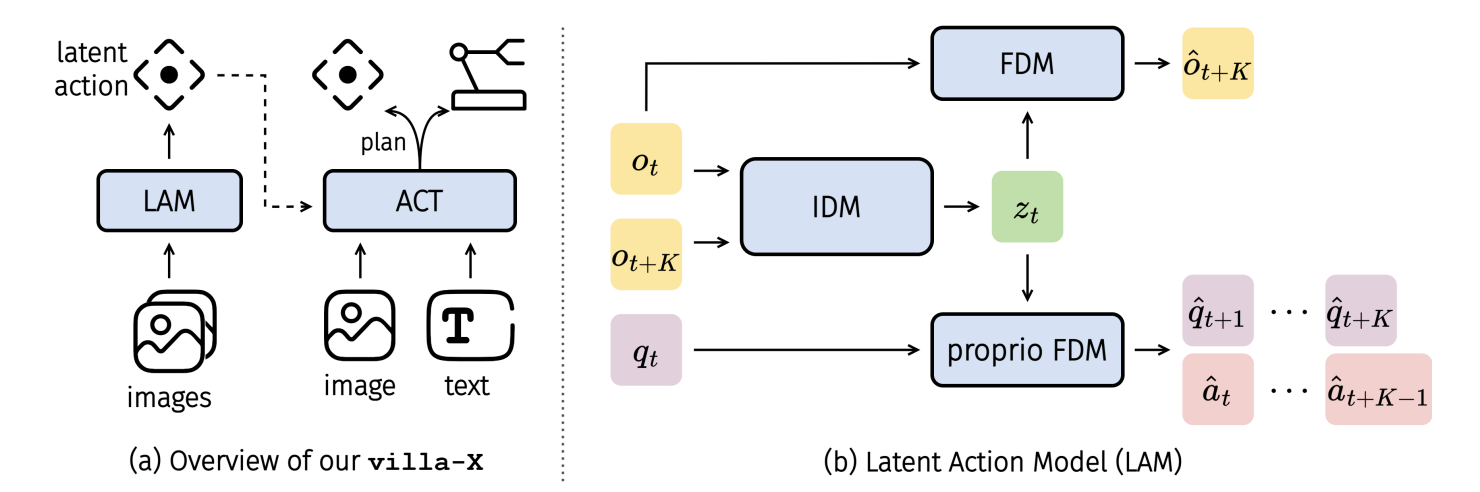
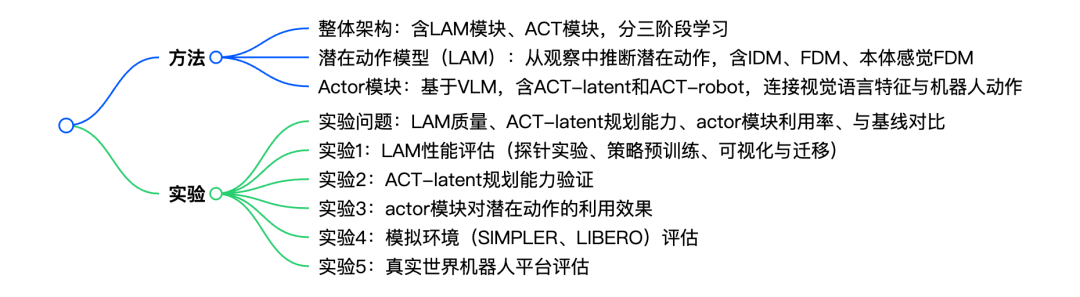
5 villa-X: 視覚・言語・行動モデルにおける潜在行動モデリングの強化
本論文では、潜在行動モデリング能力を向上させ、それによって一般化可能なロボット操作ポリシーを学習することを目的とした、視覚・言語・潜在行動に基づく新たなフレームワークであるvilla-Xを提案する。実験結果では、villa-XがSIMPLERやLIBEROなどのシミュレーション環境、そして2つの実世界ロボットプラットフォームにおいて優れた性能を発揮することが実証されている。
論文リンク:https://go.hyper.ai/8IWxU