Command Palette
Search for a command to run...
ロボット工学のスタートアップ企業であるSkild AIは、ソフトバンク、Nvidia、Sequoia Capital、ベゾスなどからの投資を受け、汎用基礎モデルの開発のために14億ドルを調達した。
2026年1月中旬、ロボット工学のスタートアップ企業であるSkild AIは、シリーズCの資金調達ラウンドで約14億ドルを調達し、企業価値が140億ドルを超えたと発表しました。このラウンドは日本のソフトバンクグループが主導し、NVIDIAのNVentures、マッコーリー・キャピタル、そしてAmazon創業者のジェフ・ベゾスが設立したBezos Expeditionsなどの戦略的投資家が参加しました。サムスン、LG、シュナイダーエレクトリック、Salesforce Venturesも参加しました。
この分野に関心のある読者にとって、この投資家リストは見覚えがあるかもしれません。彼らのうち数名は最近、別の有力ロボットスタートアップであるField AIに投資しました。Field AIは、様々な種類のロボットと連携し、様々な環境に適応できる「ユニバーサルロボットインテリジェントブレイン」の開発に注力しています。一方、Skild AIはAI駆動型ロボット「ブレイン」の開発を明言しています。両社は戦略的な方向性が似ているように見えます。
ロボットのハードウェアが未だ発展段階にあり、応用シナリオが極めて細分化されている現状において、ロボット製造以外の分野にも資金が繰り返し、そして着実に流入しています。これは、資本による利潤追求という鉄則をある程度反映しており、設立から3年も経っていないこのスタートアップ企業が将来有望な道を選んだことを裏付けています。
企業ウェブサイト:
https://www.skild.ai
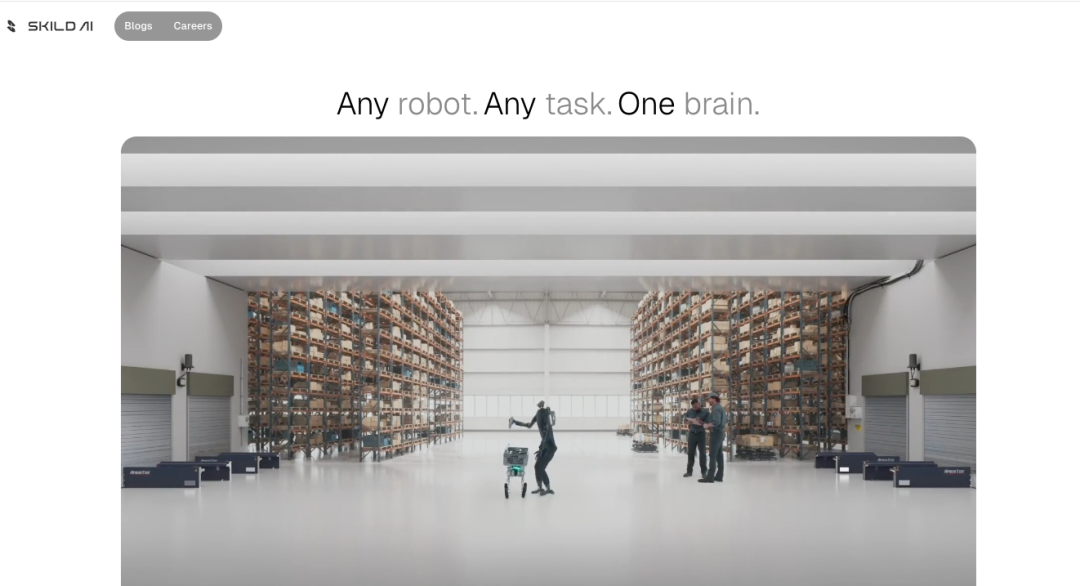
どんなロボットでも、どんなタスクでも、1つの脳で
「どんなロボットでも、どんなタスクでも、ひとつの脳で。」
Skild AIのウェブサイトを開くと、この意欲的なスローガンがすぐに目に飛び込んできます。このスローガンはXの公式アカウントや、創設者の一人であるアビナフ・グプタ氏への最近のNDTVインタビューでも取り上げられています。彼らは、自分たちが大切にしているモットー「どんなロボットでも、どんなタスクでも、ひとつの脳で」を繰り返し述べており、これは、ほとんどのロボット企業と比較した Skild AI の独自性を正確に要約しています。
ディーパック・パタック氏はインタビューで、「過去70年間、ロボットのデモンストレーションは数多く行われてきましたが、実際に私たちの周りに登場するロボットはまだ現れていません。ロボットには脳がないからです」と率直に述べています。パタック氏の見解では、ロボットの大規模導入が長らく困難であった根本的な理由は、真に普遍的な「インテリジェントな脳」が欠如していることにあります。
したがって、Skild AI の中心的な目標は、特定のロボットを作成することではなく、さまざまなロボットに展開できる基本モデルを開発することです。このシステムは、ヒューマノイドロボット、四足歩行ロボット、産業用ロボットアーム、あるいはモバイルプラットフォームなど、あらゆるタスクや環境で動作し、ロボットの全方向感覚知能を実現します。その中核的な価値は、持続的に拡張可能なデータソリューションを提供することにあります。これにより、ロボットは人間と同様に、観察と学習を通じて物理世界に適応できるようになります。
これは興味深い方向性です。大規模言語モデルの成功は、その背後にある膨大なデータインターネットと切り離せないことはよく知られていますが、Deepak Pathak氏は重要な問題点を指摘しました。「ロボットのためのインターネットはどこにあるのでしょうか?」 現実には、膨大な物理的相互作用データを含む既製の「ロボットのためのインターネット」は存在しません。彼らの独自の方式は、インターネット上の無数の人間のビデオデータをロボットの経験に変換することであり、「人間は観察を通じて学習し、ロボットも同じように学習するべきである」と考えています。

2人の「メンタースタイル」の創業者:学術研究から産業応用へ
Skild AI のストーリーのもう 1 つの興味深い部分は、その創設チームです。
同社は、人工知能(AI)とロボティクスの分野で経験豊富な研究者であるディーパック・パタック氏とアビナフ・グプタ氏によって設立されました。ディーパック・パタック氏は現CEOであり、AIとロボティクスの学際的研究において豊富な経験を有しています。アビナフ・グプタ氏は社長を務め、AI自己教師学習とロボット学習の深い専門知識を持つ学者でもあります。共同創業者の2人は、ロボティクスとAIの統合に関する詳細な研究を世界で最も早く開始した機関の一つであるカーネギーメロン大学で教鞭をとり、研究を行っていました。

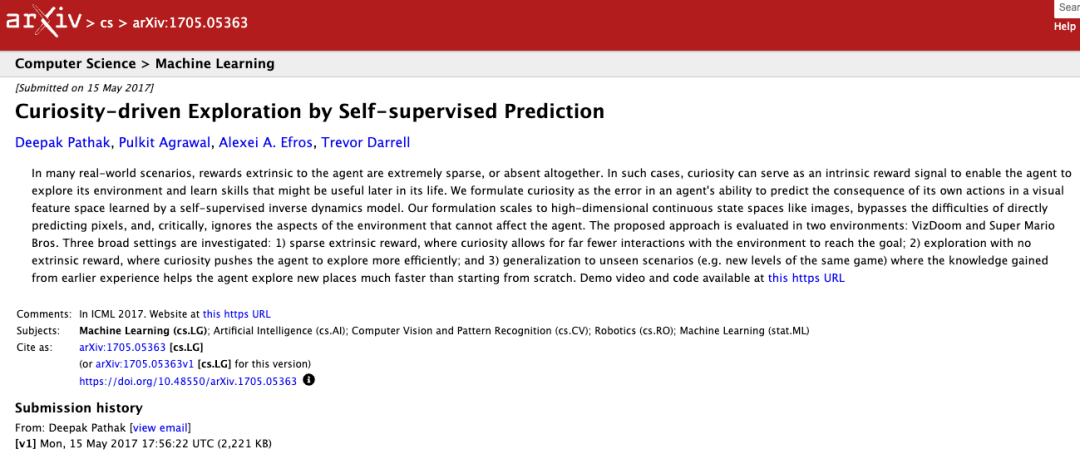
現CEOのDeepak Pathak氏の技術哲学は、カリフォルニア大学バークレー校での博士課程在学中にすでに形成されていました。フォーブス誌によると、パタック氏は「好奇心」を刺激することでロボットの学習を促進し、人工知能がより多くのシナリオを探索するように促す手法を開発した。関連研究「自己教師予測による好奇心主導の探索」は2017年に発表され、約4,000回引用されている。
パタック氏が「ロボットが主体的に学習する方法」という問題を解決したとすれば、アビナフ・グプタ氏は「大規模学習」の遺伝子をもたらした。コンピュータービジョンとロボット学習の分野における上級研究員であるグプタ氏は、膨大な量のラベルなしビデオデータを用いてAIを学習させる方法の研究に長年取り組んできた。この相補性こそが、Skild AIの技術的堀を形成している。一つは好奇心メカニズムを通じてロボットが自ら現実世界を探索することを可能にし、もう一つはインターネット規模の視覚データを処理することで、ロボットに世界を理解するための一般的な常識を与える。
2023年、彼らはSkild AIを設立することを決意し、迅速に事業を開始しました。これは「一攫千金」を狙ったスタートアップではなく、長年の研究と考察を現実のものにするための試みでした。彼らは、従来のロボット工学における垂直統合の限界がますます顕著になっていると考えています。ロボットは特定のタスク向けに設計されているため、未知の環境におけるロボットに求められる一般的な物理的推論能力や反応能力に対応することが困難です。彼らは、ロボット工学分野におけるデータの障壁を真に打ち破ることを目指しています。このビジョンは、Meta、Tesla、Nvidia、Amazon、Google、カーネギーメロン大学、スタンフォード大学、カリフォルニア大学バークレー校、イリノイ大学アーバナ・シャンペーン校といった一流大学や研究機関から、ロボット工学と人工知能の専門家グループを惹きつけています。

Skild Brain は「基本モデル」を物理世界にもたらします。
これまでのコンセプトが「ロボットがどのように学習すべきか」を扱っていたのに対し、コア製品である Skild Brain は、よりエンジニアリング指向の疑問、「この学習方法を現実世界のロボット システムに実際にどのように展開できるか」に答えます。
Skild AIの公式技術ブログの説明によると、Skild Brainは単一のタスクや特定のロボット形態向けにトレーニングされた制御モデルではなく、さまざまなロボット本体に展開できる汎用的なインテリジェントシステムとして位置付けられているとのこと。 Skild Brainは階層型アーキテクチャを採用しており、低頻度かつ高レベルの行動戦略が環境セマンティクスの理解と目標計画を担い、高頻度かつ低レベルの行動戦略への入力を提供します。その基盤となる制御機能は、オンラインビジョンと固有受容覚のみを駆動源とする完全なエンドツーエンドのモーション制御によって実現され、真の物理的インタラクション閉ループを実現します。
このアーキテクチャにより、Skild Brain には最終的に 3 つの革新的な技術的特徴がもたらされます。
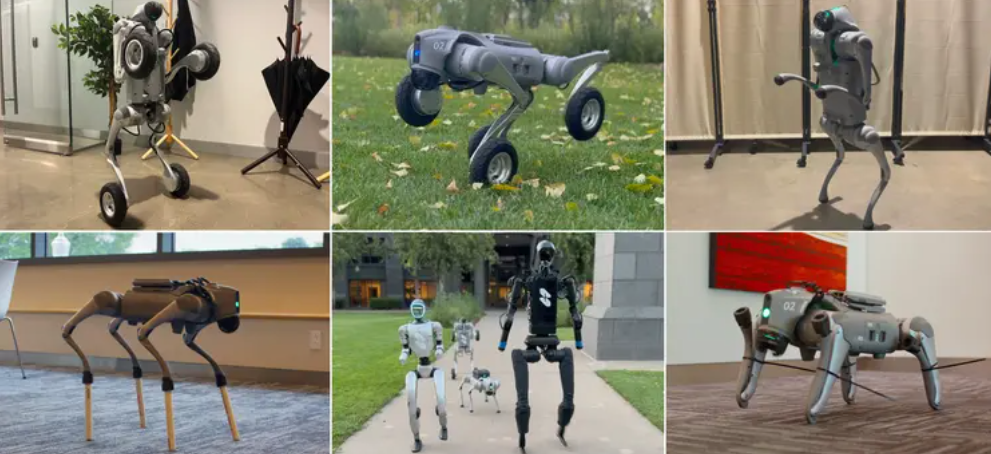
* オムニボディクロスフォーム機能: 従来のロボットアルゴリズムは「特定の機械に特化」していることが多いですが、Skild Brainは、同一の事前学習済みモデルで四足歩行ロボット、二足歩行ロボット、さらにはロボットアームを同時に駆動できることを実証しました。多様なロボット形態データを用いて大規模に学習させることで、システムはハードウェアを横断する普遍的な物理法則を抽出できます。これは、モデルが特定のモータトルクや足の構造に限定されず、一種の「普遍的な運動学的直感」を備えていることを意味します。
* 観察学習(Learning by Watching)のためのデータスケーリング: Skild AIは、人間による高価なデモンストレーションを回避し、インターネット上の何億もの人間の行動動画から直接インスピレーションを得てモデルを構築します。この技術は、視覚信号をロボットの物理的な体験に変換し、人間がドアを開けたり障害物を乗り越えたりする様子を観察することで、ロボットが物理世界に関する常識的な理解を構築できるようにすることで、極めて強力なゼロショット汎化能力を実現します。
* 1つのポリシー、すべてのシナリオ: Skild AIの実世界テストにおいて、このシステムを搭載したロボットは並外れた堅牢性を示しました。滑らかな実験室の床面、雑然とした倉庫、あるいは岩や雪が散らばる荒涼とした森など、どんな環境でもSkild Brainは同じ戦略を用いてリアルタイムで姿勢を調整できました。この未知の環境への適応性こそが、ロボットが実験室を離れ、様々な産業に進出するための鍵となるのです。

結論
Skild AIは、検証への最も容易な道を選ぶのではなく、ロボティクス分野における最も困難で長期的な課題である「汎用性」に真っ向から賭けました。ハードウェアが未完成で、応用範囲が絶えず変化している段階において、この選択は本質的にハイリスクではありますが、同時に未来への無限の可能性も秘めています。Skild AIが目指すものは、ロボティクス開発の次の段階に必要な前提条件となるかもしれません。
汎用ロボットが本当に到来するかどうかはまだ分からないが、業界の焦点が変化しつつあることは確かだ。長らく、ロボットに関する議論は特定の形態、単一のシナリオ、あるいは局所的なパフォーマンスを中心に展開されてきた。今、ますます多くの資本家、研究者、そしてスタートアップ企業が、より根本的な問いに目を向け始めている。それは、ロボットには真に普遍的で移転可能な知能基盤が必要なのだろうか、という問いだ。
参考文献:
1.https://www.bloomberg.com/news/articles/2026-01-14/robotics-startup-skild-valued-above-14-billion-after-softbank-led-funding-round?embedded-checkout=true
2.https://www.forbes.com/sites/rashishrivastava/2024/07/09/this-15-billion-ai-company-is-building-a-general-purpose-brain-for-robots
3.https://www.businesswire.com/news/home/20240709306400/en/Skild-AI-Raises-%24300M-Series-A-To-Build-A-Scalable-AI-Foundation-Model-For-Robotics
4.https://www.youtube.com/watch?v=yesita2zN5c








