Command Palette
Search for a command to run...
Grâce Aux Investissements De SoftBank, Nvidia, Sequoia Capital, Bezos Et d'autres, La Startup De Robotique Skild AI a Levé 1,4 Milliard De Dollars Pour Développer Des Modèles Fondamentaux À Usage général.
À la mi-janvier 2026, la startup de robotique Skild AI a annoncé la finalisation d'une levée de fonds de série C d'environ 1,4 milliard de dollars, valorisant l'entreprise à plus de 14 milliards de dollars. Ce tour de table a été mené par le groupe japonais SoftBank, avec la participation d'investisseurs stratégiques tels que NVentures (filiale de Nvidia), Macquarie Capital et Bezos Expeditions (fondée par Jeff Bezos, fondateur d'Amazon). Samsung, LG, Schneider Electric et Salesforce Ventures ont également participé à ce financement.
Pour les lecteurs intéressés par ce domaine, cette liste d'investisseurs ne sera peut-être pas sans rappeler d'autres acteurs. Plusieurs d'entre eux ont récemment investi dans Field AI, une autre start-up prometteuse en robotique, qui se consacre à la création d'un « cerveau intelligent universel pour robots », capable de fonctionner avec différents types de robots et de s'adapter à divers environnements. De son côté, Skild AI a clairement annoncé son intention de créer un « cerveau » pour robots piloté par l'IA. Les deux entreprises semblent partager des orientations stratégiques similaires.
Alors que le matériel robotique est encore en plein développement et que ses applications restent très fragmentées, les capitaux affluent de manière constante vers quelques entreprises qui ne se contentent pas de fabriquer des robots. Ceci reflète, dans une certaine mesure, la loi immuable de la recherche du profit par les capitaux et confirme que cette jeune pousse, créée il y a moins de trois ans, a choisi une voie prometteuse.
Site web de l'entreprise :
https://www.skild.ai
N'importe quel robot, n'importe quelle tâche, un seul cerveau
"N'importe quel robot. N'importe quelle tâche. Un seul cerveau."
Dès l'ouverture du site web de Skild AI, ce slogan ambitieux attire immédiatement le regard. Il figure également sur le compte officiel X et dans une récente interview accordée à NDTV à l'un des fondateurs, Abhinav Gupta.Ils ont mentionné à plusieurs reprises la devise qui leur est chère : « Un robot, une tâche, un cerveau », ce qui résume parfaitement le caractère unique de Skild AI par rapport à la plupart des entreprises de robotique.
Dans une interview, Deepak Pathak a déclaré sans ambages : « De nombreuses démonstrations de robots ont eu lieu au cours des 70 dernières années, mais aucun robot n’est encore apparu parmi nous, car les robots sont dépourvus d’intelligence. » Selon lui, la raison fondamentale pour laquelle le déploiement à grande échelle des robots a été si difficile pendant si longtemps réside dans l’absence d’une « intelligence » véritablement universelle.
Par conséquent, l'objectif principal de Skild AI n'est pas de créer un robot spécifique, mais de développer un modèle de base pouvant être déployé sur différents robots.Qu'il s'agisse d'un robot humanoïde, d'un robot quadrupède, d'un bras robotisé industriel ou d'une plateforme mobile, ce système peut opérer dans divers environnements et pour diverses tâches, en dotant les robots d'une intelligence sensorielle omnidirectionnelle. Sa principale valeur réside dans sa capacité à fournir une solution de données durablement évolutive, permettant aux robots de s'adapter au monde physique par l'observation et l'apprentissage, à l'instar des humains.
C'est une piste intéressante. On sait que le succès des grands modèles de langage est indissociable de l'immense quantité de données qui les sous-tendent, mais Deepak Pathak a soulevé un problème majeur : « Où est l'Internet des robots ? » En réalité, il n'existe pas d'« Internet des robots » prêt à l'emploi, contenant d'énormes quantités de données d'interaction physique.Leur formule unique consiste à transformer les innombrables données vidéo humaines disponibles sur Internet en expérience robotique, partant du principe que « les humains apprennent par l'observation, et les robots devraient apprendre de la même manière ».

Deux fondateurs « à la manière d’un mentor » : de la recherche universitaire à l’application industrielle
Un autre aspect intéressant de l'histoire de Skild AI concerne son équipe fondatrice.
L'entreprise a été fondée par Deepak Pathak et Abhinav Gupta, deux chercheurs chevronnés dans les domaines de l'intelligence artificielle et de la robotique. Deepak Pathak en est l'actuel PDG et possède une vaste expérience de la recherche interdisciplinaire en IA et en robotique. Abhinav Gupta occupe le poste de président et est également un universitaire spécialisé dans l'apprentissage auto-supervisé en IA et l'apprentissage robotique. Auparavant, les deux cofondateurs ont enseigné et mené des recherches à l'Université Carnegie Mellon, l'une des premières institutions au monde à avoir mené des travaux approfondis sur l'intégration de la robotique et de l'IA.

La philosophie technologique de l'actuel PDG, Deepak Pathak, s'est déjà formée durant ses études doctorales à l'UC Berkeley.D'après Forbes, Pathak a mis au point une méthode pour stimuler l'apprentissage des robots en exploitant leur curiosité, les incitant ainsi à explorer davantage de scénarios. Cette recherche, intitulée « Exploration guidée par la curiosité grâce à la prédiction auto-supervisée », a été publiée en 2017 et a été citée près de 4 000 fois.
Si Pathak a résolu le problème de l'apprentissage proactif des robots, Abhinav Gupta a quant à lui introduit les principes de l'apprentissage à grande échelle. Chercheur émérite en vision par ordinateur et en apprentissage robotique, Gupta se consacre depuis longtemps à l'étude des méthodes d'entraînement de l'IA à partir d'immenses quantités de données vidéo non étiquetées. Cette complémentarité constitue l'atout technologique majeur de Skild AI : d'une part, elle permet aux robots d'explorer le monde physique de manière autonome grâce à un mécanisme de curiosité ; d'autre part, elle leur confère un bon sens général pour comprendre le monde grâce au traitement de données visuelles à l'échelle d'Internet.
En 2023, ils décidèrent de fonder Skild AI et la lancèrent rapidement. Il ne s'agissait pas d'une start-up à but lucratif, mais plutôt d'une tentative de concrétiser un projet de recherche et de réflexion de longue haleine. Ils estiment que les limites de l'intégration verticale de la robotique traditionnelle sont de plus en plus évidentes. Les robots étant conçus pour des tâches spécifiques, il est difficile d'appréhender les capacités générales de raisonnement physique et de réaction nécessaires aux robots évoluant dans des environnements inconnus. Ils espèrent véritablement lever les obstacles liés aux données dans le domaine de la robotique. Cette vision a attiré un groupe d'experts en robotique et en intelligence artificielle issus d'universités et d'institutions prestigieuses telles que Meta, Tesla, Nvidia, Amazon, Google, l'Université Carnegie Mellon, l'Université Stanford, l'UC Berkeley et l'Université de l'Illinois à Urbana-Champaign.

Skild Brain transpose le « modèle fondamental » dans le monde physique.
Si les concepts précédents portaient sur « comment les robots devraient apprendre », le produit principal Skild Brain répond à une question plus orientée ingénierie : comment cette méthode d'apprentissage peut-elle être réellement déployée dans des systèmes robotiques du monde réel ?
Selon la description figurant sur le blog technique officiel de Skild AI, Skild Brain n'est pas un modèle de contrôle entraîné pour une tâche unique ou une forme de robot spécifique, mais se positionne comme un système intelligent général pouvant être déployé sur différents corps de robots. Skild Brain adopte une architecture hiérarchique : une stratégie d’action de haut niveau et à basse fréquence analyse la sémantique de l’environnement et planifie les objectifs, alimentant ainsi une stratégie d’action de bas niveau et à haute fréquence. Ses capacités de contrôle sous-jacentes reposent sur une gestion complète du mouvement, entièrement pilotée par la vision et la proprioception en temps réel, permettant une interaction physique en boucle fermée.
Cette architecture confère finalement à Skild Brain trois caractéristiques technologiques disruptives :
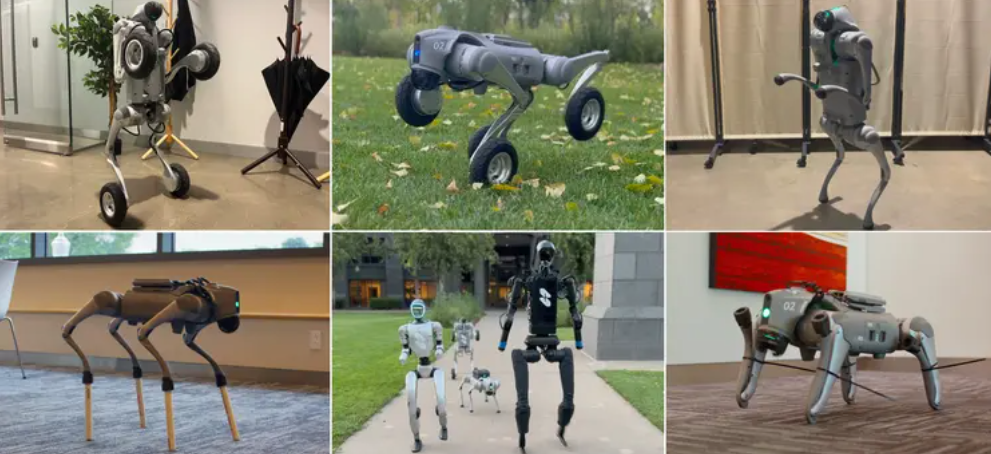
* Capacités multiformes omniprésentes : Les algorithmes robotiques traditionnels sont souvent spécifiques à une machine particulière, mais Skild Brain a démontré qu'un même modèle pré-entraîné peut piloter simultanément des robots quadrupèdes, des robots bipèdes et même des bras robotisés. Grâce à un entraînement à grande échelle utilisant des données morphologiques variées, le système peut extraire des lois physiques universelles applicables à différents matériels. Ainsi, le modèle n'est plus limité à des couples moteurs ou des structures de pieds spécifiques, mais possède une sorte d'« intuition cinématique universelle ».
* Mise à l'échelle des données pour l'apprentissage par observation (Apprentissage par observation) : Skild AI s'affranchit des coûteuses démonstrations humaines, permettant à ses modèles de s'inspirer directement de centaines de millions de vidéos d'activités humaines disponibles sur Internet. Cette technologie transforme les signaux visuels en expériences physiques pour les robots, leur permettant ainsi de développer une compréhension intuitive du monde physique en observant comment les humains ouvrent des portes et franchissent des obstacles. Ils atteignent ainsi des capacités de généralisation extrêmement performantes dès le départ.
* Une seule police d'assurance, tous les scénarios : Lors des tests en conditions réelles menés par Skild AI, les robots équipés de ce système ont démontré une robustesse exceptionnelle. Que ce soit sur un sol lisse de laboratoire, dans un entrepôt encombré ou au cœur d'une forêt rocailleuse et enneigée, Skild Brain a pu ajuster sa posture en temps réel selon la même stratégie. Cette capacité d'adaptation aux environnements inconnus est essentielle pour permettre aux robots de quitter le laboratoire et d'intégrer divers secteurs d'activité.

Conclusion
Skild AI n'a pas opté pour la voie de la facilité en matière de vérification, mais a misé directement sur « l'applicabilité générale », le problème le plus complexe et le plus arduaire du domaine de la robotique. À un stade où le matériel n'est pas encore finalisé et où les limites des applications évoluent constamment, ce choix comporte un risque élevé, mais offre également des perspectives d'avenir illimitées. L'objectif que Skild AI s'efforce d'atteindre pourrait bien constituer un prérequis indispensable à la prochaine étape du développement de la robotique.
L'avènement des robots à usage général reste incertain, mais une chose est sûre : l'industrie est en pleine mutation. Longtemps, les discussions sur les robots ont porté sur des formes spécifiques, des scénarios particuliers ou des performances localisées. Désormais, de plus en plus de capitaux, de chercheurs et de start-ups s'intéressent à une question plus fondamentale : les robots ont-ils besoin d'une intelligence véritablement universelle et transférable ?
Références :
1.https://www.bloomberg.com/news/articles/2026-01-14/robotics-startup-skild-valued-above-14-billion-after-softbank-led-funding-round?embedded-checkout=true
2.https://www.forbes.com/sites/rashishrivastava/2024/07/09/this-15-billion-ai-company-is-building-a-general-purpose-brain-for-robots
3.https://www.businesswire.com/news/home/20240709306400/en/Skild-AI-Raises-%24300M-Series-A-To-Build-A-Scalable-AI-Foundation-Model-For-Robotics
4.https://www.youtube.com/watch?v=yesita2zN5c








