Command Palette
Search for a command to run...
Der Zweibeinige Roboter Absolvierte Einen 5-Kilometer-Lauf Mit Einer Geschwindigkeit Von 9 Minuten Und 18 Sekunden Pro Kilometer.
Beschreibung: Cassie von der Oregon State University absolvierte einen Fünf-Kilometer-Lauf in 53 Minuten und stellte damit einen neuen Rekord für zweibeinige Roboter auf.
Kürzlich benötigte der zweibeinige Roboter Cassie, der von Agility Robotics, einem bekannten Robotik-Forschungsteam der Oregon State University in den USA, entwickelt wurde, für einen 5-Kilometer-Lauf 53 Minuten und erregte damit die Aufmerksamkeit aller.
Das Tempo ist dem des Menschen ähnlich, und es ist keine Aufladung für 5 Kilometer erforderlich
Das Forschungsteam Agility Robotics hat ein Video veröffentlicht, das den Ablauf und die Höhepunkte des Fünf-Kilometer-Laufs aufzeichnet.

Cassie ähnelt im Video einem Strauß, mit geschickten Gelenkbewegungen und einem gleichmäßigen Tempo.
Jonathan Hurst, Gründer von Agility Robotics und Professor an der Oregon State University, sagte: Cassie absolvierte den Fünf-Kilometer-Lauf ohne Aufladen und musste nur zweimal anhalten, um sich anzupassen: einmal wegen Überhitzung und einmal wegen zu hoher Geschwindigkeit in einer Kurve. Dies dauerte 6,5 Minuten.
Das heißt, ohne die 6,5 Minuten Ausfallzeitanpassung, Cassie absolvierte den Fünf-Kilometer-Lauf in etwa 46:30 mit einer Geschwindigkeit von 9:18 Minuten/km.

Laut dem Team ist Cassie der erste zweibeinige Roboter, der „maschinelles Lernen nutzt, um den Laufstil im Freien zu steuern“.
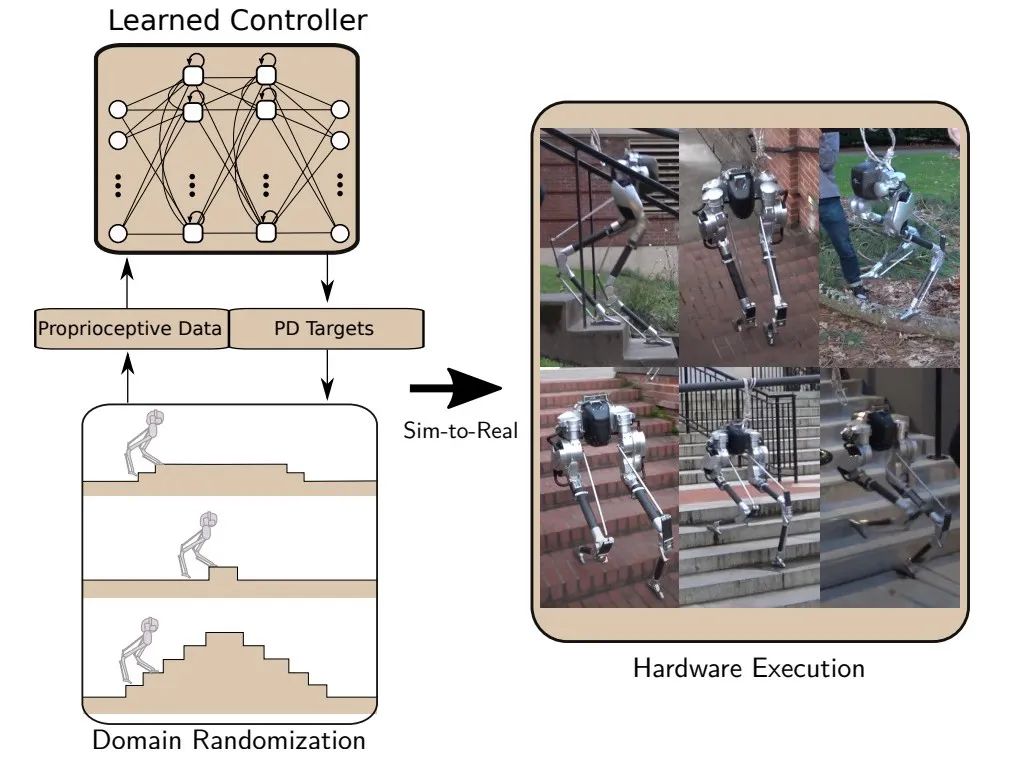
Auf Grundlage aktueller Forschungsergebnisse stellte das Team das Papier „Blind Bipedal Stair Traversal via Sim-to-Real Reinforcement Learning“ fertig, das für die diesjährige Konferenz „Robotics: Science and Systems“ (RSS) ausgewählt wurde.

Lesen Sie das vollständige Dokument
Durch bestärkendes Lernen können zweibeinige Roboter darauf trainiert werden, Veränderungen des Bodens in unterschiedlichen Höhen zu simulieren und sich daran anzupassen. Darüber hinaus können sie mit nur geringfügigen Änderungen am vorhandenen Rahmen für das bestärkende Lernen auf ebenem Boden sicher auf Treppen, unebenem Boden und in anderen Szenarien gehen.
Es ist erwähnenswert, dass Cassie sich bei Jogging- oder Treppenszenen bei der Bewegungsberechnung vollständig auf die kinetische Energieleitung der unteren Gliedmaßen ohne visuelle Eingabe verlässt.
Zweibeinige Roboter, eher wie Menschen
Der bekannte vierbeinige Roboter, der im Internet bekannte Roboterhund von Boston Dynamics, hat in den letzten Jahren erfolgreich Einsatzszenarien gefunden, indem er rannte, sprang, Treppen hinauf- und hinunterging und sogar Seil sprang und tanzte.
Doch im Vergleich zu vierbeinigen Robotern, die oft so gestaltet sind, dass sie wie Tiere aussehen, ähneln zweibeinige Roboter eher dem Menschen und sind in ihrer Funktion näher am Menschen.

Der Mensch geht, indem er Befehle durch das Gehirn sendet, das jedes Gelenk antreibt, die Bewegung auszuführen. Zweibeinige Roboter müssen menschliche Hüften und Füße simulieren, um das Gehen und die Stabilität des Roboters zu unterstützen. Nur wenn wir die dynamischen Eigenschaften des Roboters vollständig verstehen, können wir ihn dazu bringen, effiziente und komplexe Bewegungen auszuführen.
Die Dynamik der Roboter der Cassie-Serie orientiert sich am Gang von Vögeln, insbesondere Straußen. Cassies Hüften sind mit mehreren freien Winkeln ausgestattet, die Knie können jedoch nur in eine Richtung gebeugt werden. Die Knöchel sind flexibel und stark gestaltet. Die Gesamtform ist sehr leicht und kann Vibrationen auf relativ natürliche Weise reduzieren, ähnlich wie beim Gehen des Menschen.
Das Agility Robotics-Team am Dynamic Robotics Laboratory der University of Oregon genießt in der Welt der Robotik seit langem einen guten Ruf.Sie begannen 2017 mit der Entwicklung der Cassie-Serie zweibeiniger Roboter und haben nach der Durcharbeitung mehrerer Versionen bisher viele Ergebnisse erzielt. Sie erhielten vor Kurzem eine Million US-Dollar an Forschungsgeldern von der DARPA.
Das Team sagte, der Erfolg dieses fünf Kilometer langen Laufs ohne Aufladen habe ihnen großes Vertrauen gegeben und sie würden Cassies Technologie auch in Zukunft weiter transformieren und verbessern, um sie in Anwendungsszenarien wie Logistik und Vertrieb einzuführen.
Quelle:
– Offizielle Website der Oregon State University: An der Oregon State University entwickelter zweibeiniger Roboter schreibt Geschichte, indem er das Laufen lernt und 5 km absolviert
– YouTube-Video „Zweibeiniger Roboter der OSU läuft als erster 5-km-Lauf“
– Verweise