Command Palette
Search for a command to run...
تعرف الخنازير متى تلد، وهذه المرة تستخدم NNU الذكاء الاصطناعي من NVIDIA Edge Jetson
المحتويات في لمحة:بالنسبة لصناعة تربية الخنازير، فإن عملية ولادة الخنازير تشكل رابطًا رئيسيًا. ومن ثم، أصبح تحسين معدل بقاء الخنازير الصغيرة وضمان سلامة عملية ولادة الإناث من القضايا المهمة. تواجه طرق مراقبة الذكاء الاصطناعي الحالية مشاكل تتعلق بتكاليف المعدات المرتفعة ونقل المعلومات غير المستقر. استخدم باحثون من جامعة نانجينغ الزراعية أسلوب التعلم العميق خفيف الوزن لتوفير الإنذار المبكر والمراقبة الفعالة لعملية تسليم الخنزيرة، مما أدى إلى تقليل التكاليف مع تحسين دقة المراقبة.
الكلمات المفتاحية:لوحة تطوير مضمنة خفيفة الوزن للتعلم العميق
نُشرت هذه المقالة لأول مرة على منصة HyperAI WeChat العامة~
تحتل صناعة تربية الخنازير في بلدي المرتبة الأولى في العالم، ولكن الصناعة ككل لا تزال تواجه مشكلة ضعف مستويات التربية. بالنسبة للعديد من مزارع الخنازير الكبيرة، فإن أهم شيء هو خفض التكاليف مع زيادة معدل بقاء الخنازير الصغيرة. تعتمد الطرق التقليدية على الإشراف البشري، وهو أمر صعب ويعتمد بشكل كبير على الذات.في مواجهة سلسلة من المشاكل مثل عسر الولادة أثناء ولادة الخنزيرة واختناق الخنازير الصغيرة، من الصعب التعامل معها في الوقت المناسب وبطريقة فعالة.
في السنوات الأخيرة، أصبح مراقبة الذكاء الاصطناعي وسيلة مهمة لحل هذه المشكلة. المبدأ الأساسي هو استخدام التعلم العميق المبني على الحوسبة السحابية للمراقبة.ومع ذلك، فإن هذه الطريقة تتطلب متطلبات عالية من المعدات وعرض النطاق الترددي للشبكة، كما أنها مقيدة للغاية وغير مستقرة.
وفقًا لشبكة تربية الخنازير الصينية، غالبًا ما تظهر الخنازير سلوك التعشيش وتزيد من وتيرة تغييرات الوضع في غضون 12 إلى 24 ساعة قبل الولادة بسبب تأثيرات الأوكسيتوسين أو البرولاكتين.وبناءً على ذلك، صمم الفريق التجريبي نموذجًا لمراقبة وضعية الخنزيرة وولادة الخنزير الصغير من خلال خوارزمية YOLOv5 ونشرها على لوحة تطوير NVIDIA Jetson Nano.يتيح هذا إمكانية مراقبة العملية وتحليلها في سيناريوهات معقدة، مع خصائص التكلفة المنخفضة، والزمن المنخفض، والكفاءة العالية، وسهولة التنفيذ.
تم نشر هذا الإنجاز في مجلة "Sensors" في يناير 2023، تحت عنوان "الإنذار المبكر والإشراف على عمليات الولادة لتطبيقات اللوحات المدمجة".

عنوان الورقة:
نظرة عامة على التجربة
البيانات والمعالجة
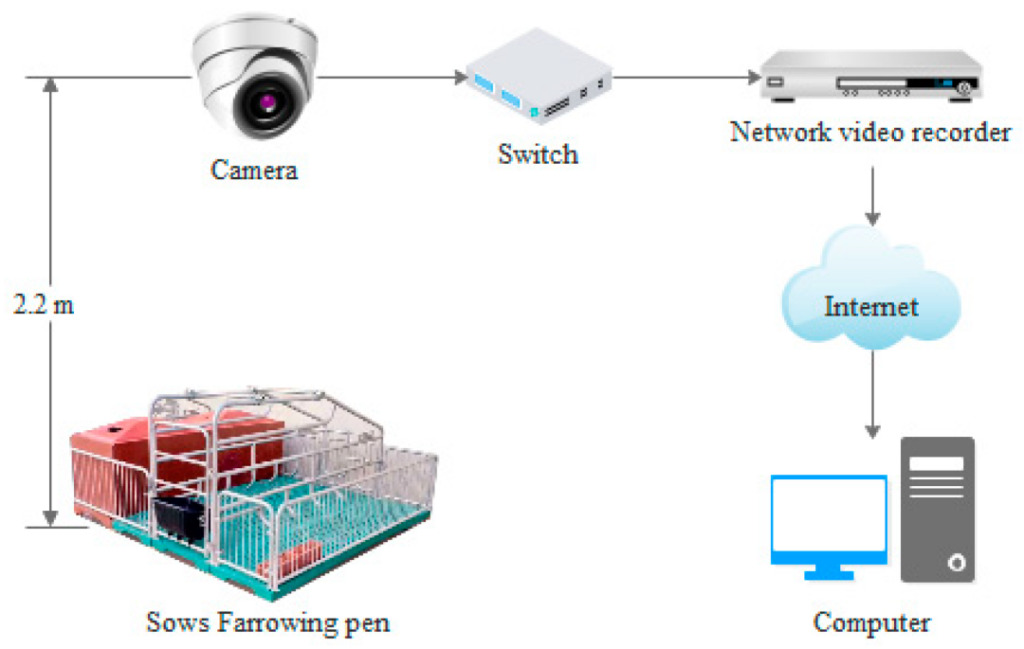
وتأتي بيانات الفيديو من مزرعتين في سوتشيان وجينجيانج بمقاطعة جيانغسو.تم جمع بيانات الفيديو لـ 35 خنزيرة أثناء الولادة.من بينها، تم تسجيل بيانات 11 خنزيرة في مزرعة خنازير جينجيانج من 27 أبريل إلى 13 مايو 2017، وتم تسجيل بيانات 24 خنزيرة في مزرعة خنازير سوتشيان من 9 إلى 15 يونيو 2020. تم وضع الخنازير بشكل عشوائي في أقلام الولادة ذات الحجم المحدد (2.2 م × 1.8 م)، وتم تسجيل بيانات الفيديو بشكل مستمر بواسطة الكاميرات لمدة 24 ساعة.
تتم العملية على النحو التالي:
بعد ذلك، تتم معالجة البيانات مسبقًا. قام الفريق التجريبي أولاً بفحص مقاطع الفيديو المسجلة قبل يوم واحد وبعد ولادة الخنازير، ثم قاموا بمعالجتها وتحويلها إلى بيانات صور باستخدام Python وOpenCV.تم استخدام برنامج الوسم لتوضيح وتعزيز بيانات وضعية الخنزيرة والخنازير الصغيرة حديثي الولادة يدويًا في 12450 صورة تم الحصول عليها.وتم الحصول على 32,541 بيانات صورة لتشكيل مجموعة البيانات.
زيادة البيانات (زيادة البيانات): يشير هذا إلى القص والترجمة والتدوير والانعكاس وتغيير السطوع وإضافة الضوضاء والقص)
تنقسم مجموعة البيانات هذه إلى 5 فئات: 4 أوضاع للخنازير (مستلقية على الجانب، مستلقية على القص، واقفة وجالسة) والخنازير الصغيرة،نسبة مجموعة التدريب ومجموعة التحقق ومجموعة الاختبار هي 7:1:2.

نموذج تجريبي
استخدم الفريق التجريبي YOLOv5s-6.0 لبناء نموذج للكشف عن وضعية الخنزيرة والخنازير الصغيرة.يتكون هذا النموذج من 4 أجزاء:
مدخل:إدخال الصورة
العمود الفقري:استخراج خصائص صورة الخنزيرة والخنزير الصغير
رقبة:دمج ميزات الصورة
تنبؤ:التنبؤ (نظرًا للاختلاف الكبير في الحجم بين الخنازير الصغيرة والخنازير الصغيرة، يستخدم هذا الجزء 3 خرائط ميزات مختلفة للكشف عن الأهداف الكبيرة والمتوسطة والصغيرة)
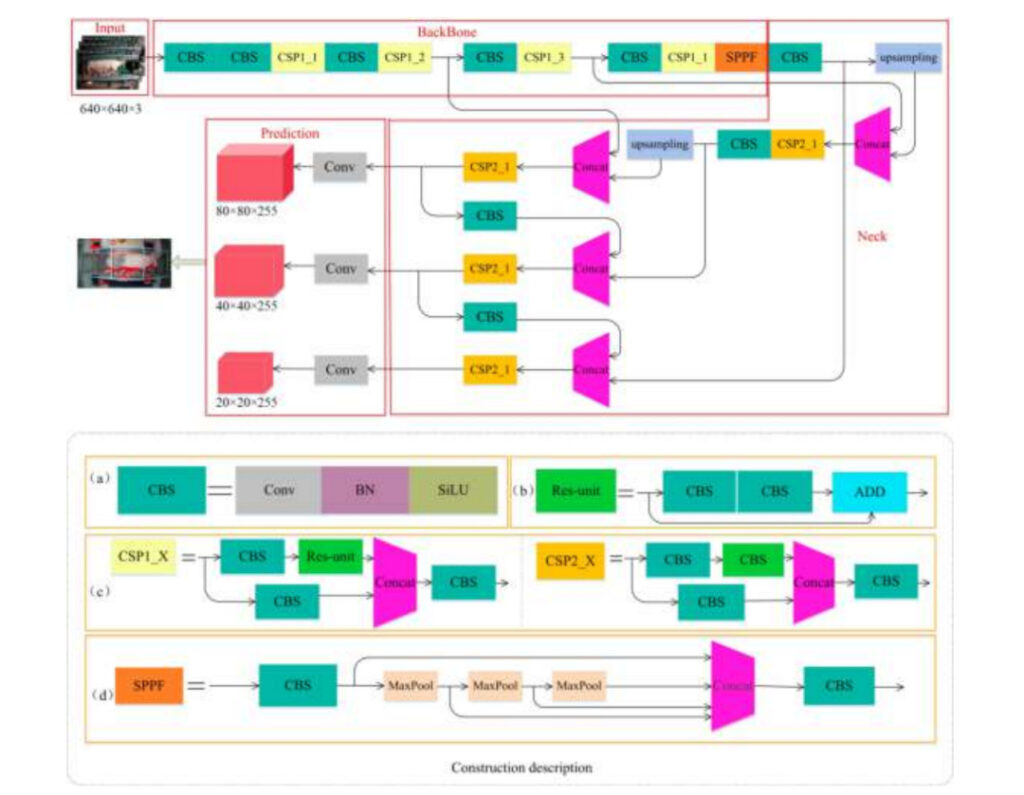
أ:تفاصيل وحدة CBS
ب:تفاصيل وحدة إعادة الوحدة
ج:تفاصيل الوحدة CSP1_X وCSP2_X
د:تفاصيل هيكل وحدة SPPF
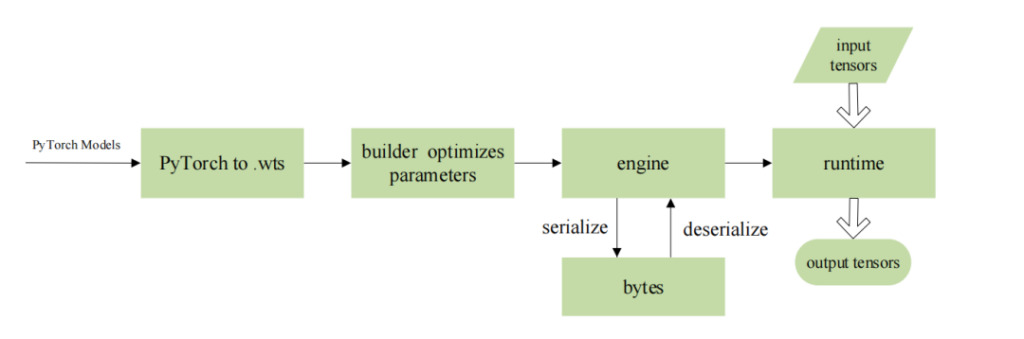
قام الفريق التجريبي بنشر الخوارزمية على منصة الحوسبة بالذكاء الاصطناعي المضمنة من سلسلة Jetson Nano من NVIDIA واستخدم TensorRT لتحسين النموذج.يتيح هذا تشغيله اللاحق على لوحة التطوير المضمنة للحصول على إنتاجية أعلى وزمن وصول أقل، مع تجنب تسرب البيانات المحتمل أثناء نقل الشبكة.
المعلمات المحددة هي كما يلي:
بيئة التدريب النموذجية:نظام التشغيل Ubuntu 18.04، وحدة معالجة مركزية Intel(R) Xeon(R) Gold 5118 بسرعة 2.30 جيجاهرتز، وحدة معالجة رسومية NVIDIA Quadro P4000، ذاكرة فيديو 8 جيجابايت، ذاكرة 64 جيجابايت، قرص ثابت 2 تيرابايت، إطار عمل التعلم العميق PyTorch 1.7.1 وTorchvision 0.8.2، إصدار CUDA 10.1.
بيئة نشر النموذج:نظام التشغيل Ubuntu 16.04 المتكيف مع ARM، وحدة معالجة مركزية ARM A57 رباعية النواة بسرعة 1.43 جيجاهرتز، وحدة معالجة رسومية Maxwell ذات 128 نواة، ذاكرة 4 جيجابايت، JetPack 4.5، Cuda10.2.89، Python 3.6، TensorRT 7.1، Opencv 4.1.1، بيئة التعلم العميق CMake 3.21.2.
معلمات النموذج:(1) بالنسبة لتدريب YOLOv5، اضبط العصر 300، ومعدل التعلم 0.0001، وحجم الدفعة 16؛ (2) بالنسبة للشبكة المحسّنة لـ TensorRT، batch_size هو 1 والدقة هي fp16.
وأخيرا، استخدم الفريق التجريبي مؤشرات مثل الدقة ومعدل الاسترجاع وسرعة الكشف لتقييم أداء الخوارزميات المختلفة.
في،يمكن استخدام الدقة والتذكر لقياس قدرة الخوارزمية على اكتشاف جميع فئات البيانات.، بما في ذلك 4 أوضاع للخنازير (الاستلقاء على الجانب، والاستلقاء على الصدر، والوقوف والجلوس) والخنازير الصغيرة حديثي الولادة؛يتم استخدام حجم النموذج وسرعة الكشف لقياس ما إذا كانت الخوارزمية مناسبة للنشر على الأجهزة المضمنة.
صيغة الحساب هي كما يلي:
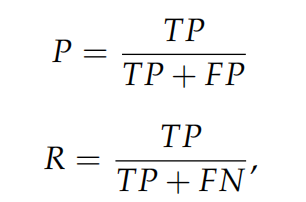
TP:عدد التوقعات الصحيحة للعينات الإيجابية
ف ب:عدد التنبؤات غير الصحيحة للعينات الإيجابية
ف ن:عدد التوقعات غير الصحيحة للعينات السلبية
النتائج التجريبية
أداء النموذج
توصل الفريق التجريبي إلى أنه في 300 حقبة من تدريب النموذج،مع زيادة دورة التكرار، يظهر معدل الدقة والاسترجاع اتجاهًا تصاعديًا بشكل عام.وفي الوقت نفسه، يمكن أن نجد أنإن دقة واسترجاع نموذج YOLOv5s بعد زيادة البيانات مرتفعان باستمرار.
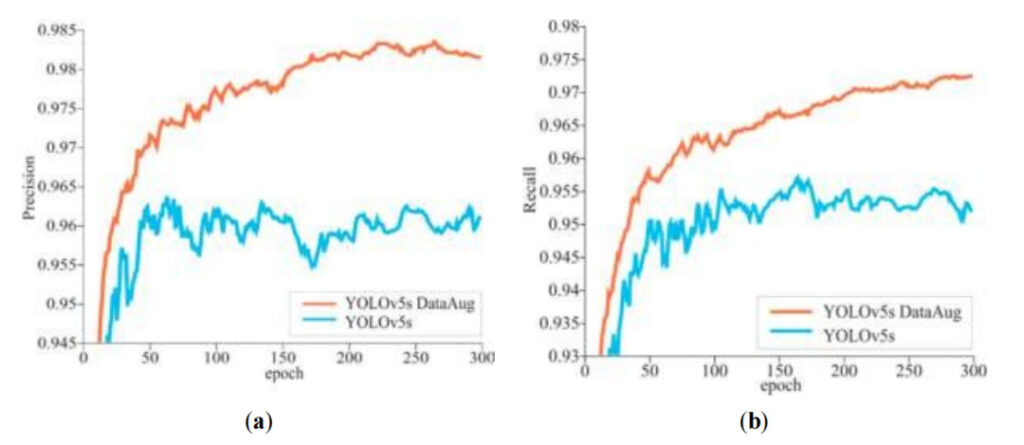
أ:دقة
ب:يتذكر
الخط البرتقالي:دقة/استدعاء نموذج YOLOv5s بعد زيادة البيانات
الخط الأزرق:دقة/استدعاء نموذج YOLOv5s دون زيادة البيانات
في التجارب، يتم استخدام متوسط الدقة المتوسطة (mAP) لتقييم قدرة الخوارزمية على اكتشاف جميع الفئات.أثناء تقييم خوارزمية YOLOv5s، قام الفريق التجريبي أيضًا بمقارنة أداء خوارزميتي YOLOX-nano وNanoDet-m. وأظهرت النتائج أن سرعة اكتشاف YOLOX-nano وNanoDet-m كانت أسرع قليلاً من سرعة اكتشاف YOLOv5s، ولكن الدقة كانت أقل، وكانت هناك حالات من الكشف الخاطئ والكشف الخاطئ عن الخنازير الصغيرة. تتمتع خوارزمية YOLOv5s بأداء جيد في اكتشاف الأشياء ذات الأحجام المختلفة، ومتوسط سرعة اكتشاف النموذج في الصور ومقاطع الفيديو المحلية والكاميرات قابلة للمقارنة مع الخوارزميتين الأخريين.علاوة على ذلك، يتمتع نموذج YOLOv5s المعزز بالبيانات بأعلى دقة وتذكر، وهما 0.982 و0.937 على التوالي.

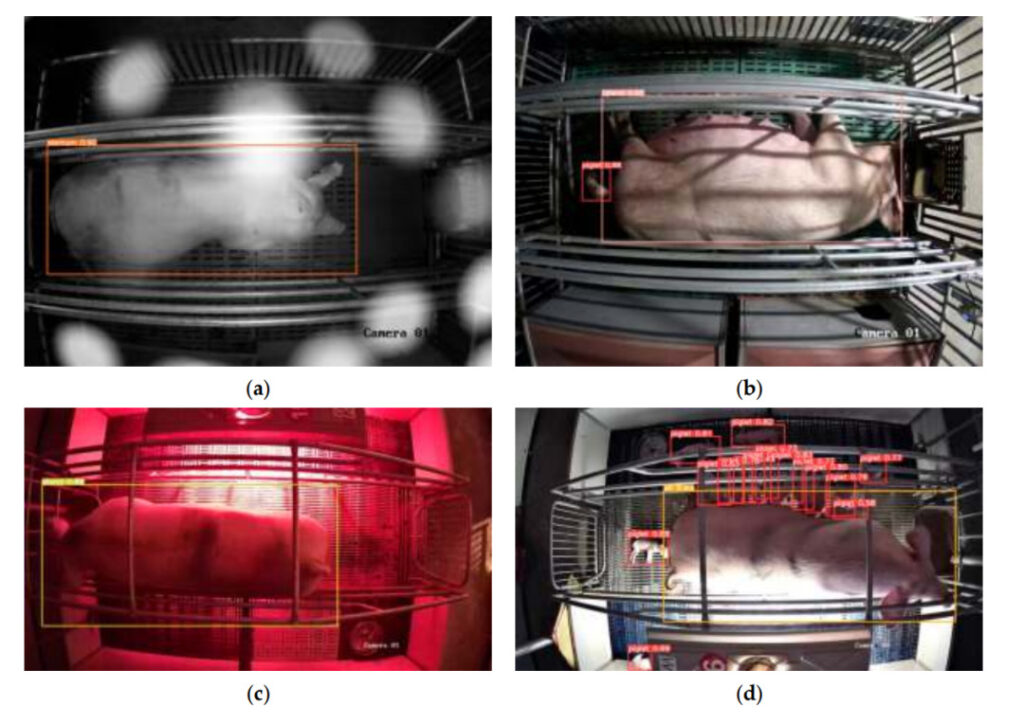
ومن أجل اختبار قدرة النموذج على التعميم والقدرة على مكافحة التداخل، احتفظ الفريق التجريبي بواحدة من الخنازير باعتبارها "عينة جديدة" عند تدريب النموذج، واختار 410 صور تحتوي على مشاهد معقدة مختلفة لاختبار النموذج. وتظهر النتائج أنيتأثر الكشف الخاطئ أو الخاطئ عن وضعية الخنزيرة بشكل أساسي بالتغيرات في الإضاءة؛ تتأثر الخنازير الصغيرة بشكل أساسي بتشغيل مصابيح الحرارة، أي أنه من الصعب التعرف على الخنازير الصغيرة تحت الضوء القوي؛ إن الوقت الذي يولد فيه الخنزير الصغير الأول ومشاهد مصابيح الحرارة ذات الألوان المختلفة لها تأثير ضئيل على قدرة النموذج على الكشف.

العمود الثاني من اليسار:معدل الكشف عن وضعية الخنزيرة هو الأعلى في ظل ظروف الإضاءة المعقدة
ثلاثة أعمدة متبقية:معدل الكشف الخاطئ عن وضعية الخنزيرة أعلى في ظل ظروف الإضاءة المعقدة وعند تشغيل مصابيح التدفئة في الليل
أربعة أعمدة متبقية:وكان عدد النتائج الإيجابية الكاذبة أعلى في ظروف الإضاءة المختلطة وفي الليل عندما كانت مصابيح التدفئة مضاءة.
خمسة أعمدة متبقية:كان عدد الخنازير الصغيرة المفقودة أعلى في الليل عندما كانت أضواء التدفئة مضاءة
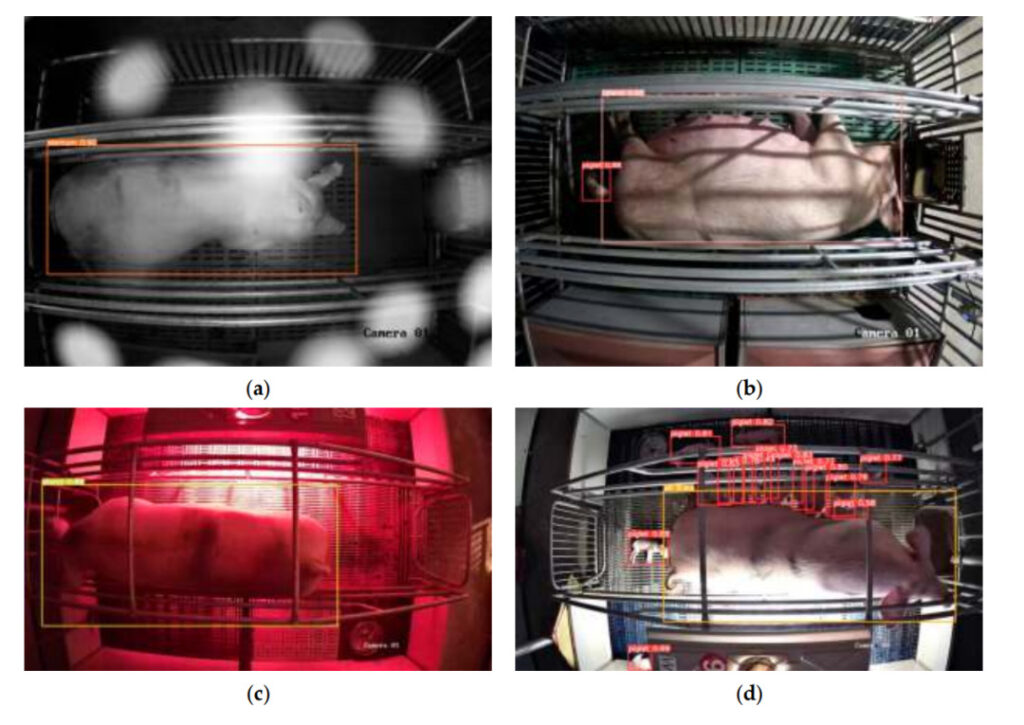
أ:تحت الإضاءة المعقدة
ب:أول خنزير صغير يولد
ج:ألوان مختلفة من مصابيح الحرارة
د:مصباح التدفئة مضاء في الليل
قبل وبعد النشر
وبعد أن نشر الفريق التجريبي النموذج على NVIDIA Jetson Nano، تمكنوا من اكتشاف وضعية الخنازير الصغيرة والصغيرة بدقة. بعد مقارنة نتائج الاختبار، وجدنا أنوعلى الرغم من أن النموذج أظهر انخفاضًا طفيفًا في الدقة بعد نشره على NVIDIA Jetson Nano، إلا أن سرعته زادت بأكثر من 8 مرات.

العمود الأيسر:تنسيق النموذج
العمود الثاني من اليسار:منصة نشر النموذج، Quadro P4000 هي المنصة المستخدمة للاختبار المقارن.
إن استخدام وحدة معالجة الرسوميات على لوحة التطوير المضمنة يحد من التطبيق العملي لهذا النموذج. يوضح الرسم البياني التالي استخدام وحدة معالجة الرسوميات الخاصة بالنموذج عند اكتشاف الكائنات في الصور ومقاطع الفيديو على لوحة تطوير مضمنة. نظرًا لأن دفق الفيديو يحتاج إلى فك التشفير، فإن معدل استخدام وحدة معالجة الرسوميات عند اكتشاف مقاطع الفيديو أعلى من معدل اكتشاف الصور، ولكن هذا لا يؤثر على أداء النموذج.وتظهر نتائج الاختبار أن النموذج في الدراسة يمكن تطبيقه على سيناريوهات إنتاج مختلفة.
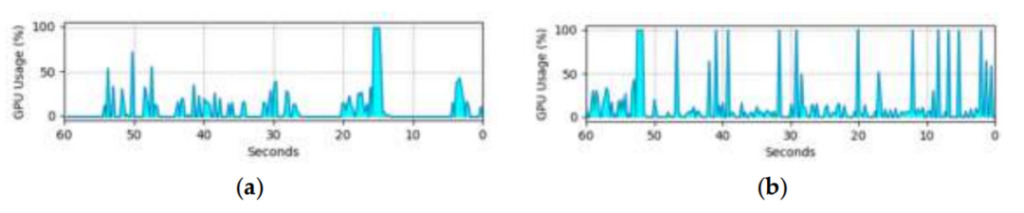
(أ) استخدام وحدة معالجة الرسوميات في اكتشاف الصور
(ب) استخدام وحدة معالجة الرسوميات في اكتشاف الفيديو
نتائج الاختبار
قام الفريق التجريبي باختبار وتحليل بيانات 22 خنزيرة.تم الحصول على متوسط تكرار تغيرات وضعية الخنازير من 48 ساعة قبل الولادة إلى 24 ساعة بعد الولادة.وبناءً على وتيرة التغييرات (كما هو موضح في الشكل أدناه)، لخص الفريق استراتيجية الإنذار المبكر للنموذج على النحو التالي:
1. سيتم إصدار إنذار عندما يتجاوز تردد انتقال الوضع الحد الأعلى (17.5 مرة / ساعة) أو ينخفض إلى ما دون الحد الأدنى (10 مرات / ساعة).
2. من أجل تقليل تأثير الأنشطة اليومية للخنزير على التحذير، يجب أن يكون الحد الأعلى أو الأدنى أكثر من 5 ساعات.
وأظهرت الاختبارات التي أجريت على العينات أنتمكن النموذج من إصدار إنذار قبل 5 ساعات من بدء الولادة، وكان الخطأ بين وقت التحذير ووقت الولادة الفعلي 1.02 ساعة.
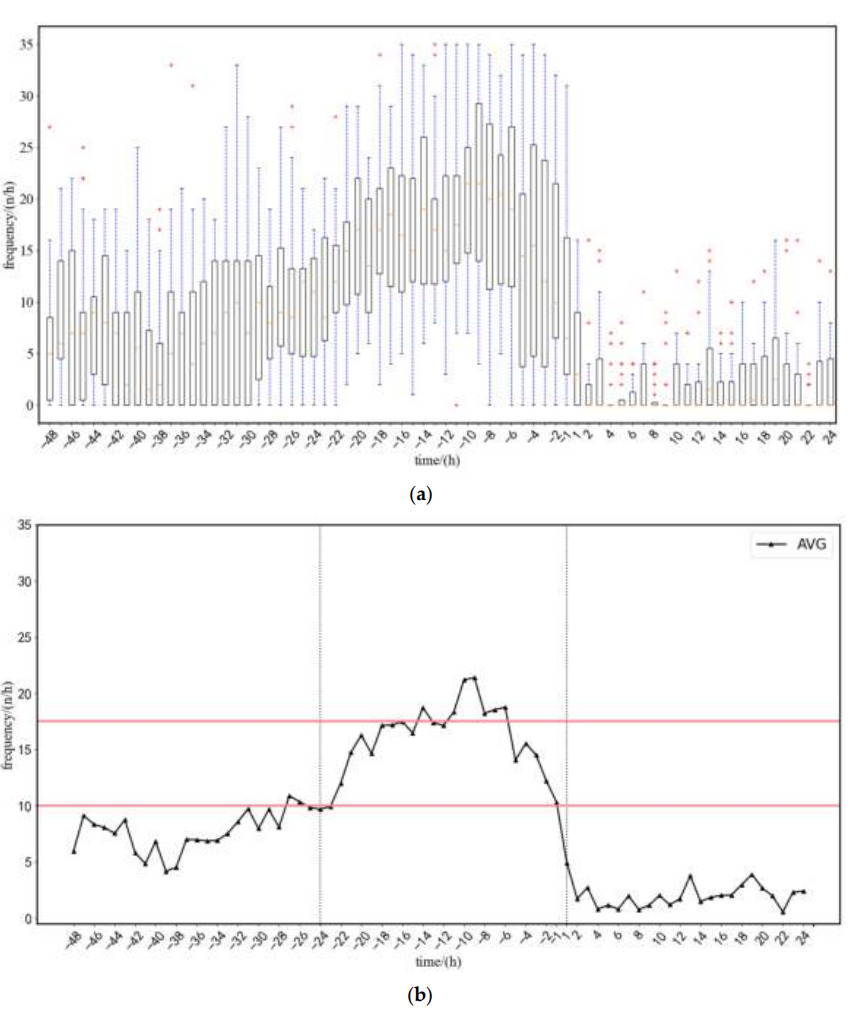
(أ) متوسط معدل انتقال الوضعية
(ب) متوسط تكرار انتقال الوضعية
48 ساعة إلى 24 ساعة قبل التسليم،خلال هذه الفترة تكون أنشطة الخنازير طبيعية
24 ساعة إلى ساعة واحدة قبل التسليم،يزداد معدل تغيرات الوضعية تدريجيًا ثم ينخفض تدريجيًا
من ساعة إلى 24 ساعة بعد التسليم،معدل انتقالات الوضعية يقترب من 0، ثم يزداد قليلاً
عندما يتم اكتشاف أول خنزير صغير حديث الولادة، سيتم تشغيل إنذار الولادة، وعرض رسالة "بدأ الولادة! وقت البدء: XXX". بالإضافة إلى ذلك، يمكن أن يساعد ضوء LED الوامض المربين أيضًا في تحديد موقع الخنازير التي تلد بسرعة وتحديد ما إذا كان التدخل اليدوي ضروريًا.
ولكن عندما يكون معدل الكشف مرتفعًا للغاية، فغالبًا ما يتم اكتشاف الخنازير الصغيرة بشكل غير صحيح. لذلك، من أجل تحقيق الكشف في الوقت الحقيقي وتقليل الإيجابيات الكاذبة، اعتمد الفريق التجريبي "ثلاثة اختبارات متتالية"لا يمكن الحكم على الخنازير الصغيرة بأنها خنازير صغيرة إلا عندما يتم اكتشافها ثلاث مرات متتالية.ويبلغ عدد الإيجابيات الخاطئة لهذه الطريقة 1.59 مرة، في حين يبلغ عدد الإيجابيات الخاطئة لقاعدة الكشف الفردي التقليدية 9.55 مرة. انخفض عدد الإيجابيات الكاذبة بشكل كبير، وبلغ متوسط الدقة الإجمالي 92.9%.
تربية الخنازير بالذكاء الاصطناعي: عصر جديد من الزراعة الذكية
وباعتبارنا دولة رائدة في مجال تربية الخنازير في العالم، بلغ إنتاج الخنازير السنوي في بلدي حوالي 700 مليون رأس من عام 2015 إلى عام 2018. ومع ذلك، في السنوات الأخيرة، وبسبب تأثير حمى الخنازير والأمراض الأخرى، استمر عدد الخنازير الحية المتوفرة وعدد الخنازير المذبوحة في التقلب بشكل كبير. وفقًا لبيانات أبحاث الصناعة المنشورة،في السنوات الأخيرة، استمرت نسبة مربي الخنازير الأفراد في الانخفاض، في حين استمر حجم الإنتاج في الزيادة، مما يتطلب تطبيق تقنيات تربية أكثر كفاءة وكثافة في صناعة تربية الخنازير.
تتوفر في البلاد بالفعل منتجات موثوقة لتربية الخنازير بالذكاء الاصطناعي. أطلقت Alibaba Cloud، بالتعاون مع Aibo Machinery وQishuo Technology، حلاً لتربية الخنازير بالذكاء الاصطناعي لتلبية احتياجات السيناريوهات المتنوعة. يعتمد حل التربية الذكي لشركة JD Agriculture and Animal Husbandry على الذكاء الاصطناعي وإنترنت الأشياء وغيرها من التقنيات، وقد حقق "التعرف على وجه الخنزير وإمكانية تتبع السلسلة الكاملة". يتم الترويج تدريجياً لنموذج الزراعة الأكثر ذكاءً وتطوراً والذي توفره الذكاء الاصطناعي.
ومع ذلك، فإن الترويج لتربية الخنازير بالذكاء الاصطناعي لا يزال يواجه مشاكل ملحة مثل التكلفة العالية والتشغيل المعقد.ربما لا يزال الطريق طويلاً قبل أن تتمكن المزيد من مزارع الخنازير من تبني الذكاء الاصطناعي.
نُشرت هذه المقالة لأول مرة على منصة HyperAI WeChat العامة~
روابط مرجعية:
[1]https://www.163.com/dy/article/HCSQN810055360T7.html
[2]https://xueshu.baidu.com/usercenter/paper/show
[3]https://www.aliyun.com/solution/govcloud/ai-pig
[4]http://www.dekanggroup.com/index/news/detail/id/182.html
[5]https://www.thepaper.cn/newsDetail_forward_3695180
[7] دينغ تشيان، ليو لونغشين، تشن جيا، تاي مينغ، شين مينغشيا. الكشف عن هدف الخنازير الرضيعة على أساس Jetson Nano[J/OL]. معاملات الجمعية الصينية للآلات الزراعية.