Command Palette
Search for a command to run...
온라인 튜토리얼 | 휴머노이드 로봇, 인간 동작 생성, 확산 모델 미세 조정 등 NVIDIA의 최신 물리 AI 모델을 손쉽게 배포하세요.
최근 막을 내린 GTC 2026에서 NVIDIA는 큰 기대를 모았던 새로운 GPU 외에도 보다 구체적이고 실용적인 방향에 상당한 관심을 집중했습니다.물리적 AI.
젠슨 황이 반복적으로 언급한 이 개념은 핵심적인 결론을 제시합니다. 인공지능이 단순히 화면상에 존재하는 것이 아니라 물리적 환경을 인지하고, 작업을 이해하며, 행동을 수행할 수 있을 때 비로소 산업 변혁을 이끄는 진정한 기반 시설이 된다는 것입니다. 이 개념은 "실체화된 인공지능(Embodied AI)"과 매우 유사하며, 인공지능이 현실 세계와 깊이 연결되어 단순히 "움직이는" 것이 아니라 복잡한 환경에서 안정적으로 작동하는 것을 강조합니다.
따라서 선도적인 기술 컨퍼런스인 GTC 2026에서는 기본적인 휴머노이드 로봇 모델부터 고정밀 동작 생성 및 통합 인체 모델링 시스템에 이르기까지 모든 것이 논의되었음을 알 수 있습니다.NVIDIA에서 출시하는 일련의 모델들은 더 이상 모델의 기능에만 초점을 맞추지 않고 "실행"과 "행동"을 중심으로 전개됩니다.
안에,세 가지 오픈 소스 프로젝트는 NVIDIA Isaac GR00T, Kimodo 및 SOMA-X입니다.그들은 의사 결정, 생성 및 표현이라는 세 가지 수준에서 동일한 문제에 접근합니다. 즉, 기계가 복잡한 작업을 보다 자연스럽고 효율적으로 수행할 수 있도록 하는 방법입니다.
첫 번째는 작업을 이해하고 이를 실행 가능한 동작으로 변환하는 역할을 담당하고, 두 번째는 상세하고 현실적인 동작 궤적을 생성하는 데 집중하며, 세 번째는 파편화된 인간 모델이라는 오랜 문제를 해결하여 서로 다른 시스템 간의 원활한 협업을 가능하게 합니다. 이러한 각 기능은 분명한 가치를 지니지만, 더 중요한 것은 이 모든 기능이 보다 실질적인 목표, 즉 로봇을 "능동적"에서 "사용자 친화적"으로 만드는 데 기여한다는 점입니다.
게다가,NVIDIA는 또한 확산 모델 학습 방법인 FDFO를 출시했는데, 이는 생성 모델 최적화 관점에서 위의 기능들을 뒷받침하는 기초적인 지원을 제공합니다.
전 세계 개발자들이 보다 접근하기 쉽고 안정적인 환경에서 GTC 2026의 오픈소스 성과를 빠르게 경험할 수 있도록 HyperAI 웹사이트(hyper.ai)는 튜토리얼 섹션에 다음과 같은 온라인 튜토리얼을 공개했습니다.
NVIDIA Isaac GR00T: 범용 휴머노이드 로봇을 위한 기본 모델
온라인으로 실행:https://go.hyper.ai/2Cjvr
SOMA-X: 통합 파라메트릭 인체 모델 프레임워크
온라인으로 실행:https://go.hyper.ai/UcEI7
Kimodo: 인간 및 로봇 동작 생성 모델
온라인으로 실행:https://go.hyper.ai/p99vI
FDFO: 유한차분 흐름 최적화
온라인으로 실행:https://go.hyper.ai/ikihN
HyperAI는 신규 사용자를 위한 등록 혜택을 제공합니다.단 $1로 20시간 동안 RTX 5090의 컴퓨팅 성능을 이용할 수 있습니다(정가 $7).해당 리소스는 영구적으로 유효합니다.
NVIDIA Isaac GR00T
일반 휴머노이드 로봇 기본 모델
NVIDIA Isaac GR00T N1.6은 범용 휴머노이드 로봇의 기술 학습을 위해 특별히 설계된 오픈 소스 비전-언어-행동(VLA) 모델로, 2026년 3월에 출시되었습니다. 이 모델은 다양한 환경에서 조작 작업을 수행할 수 있도록 언어 및 이미지를 포함한 멀티모달 입력을 수용할 수 있는 교차 구현 설계를 채택하고 있습니다.
GR00T N1.6의 신경망 아키텍처는 시각 언어 기반 모델과 연속 동작 노이즈 제거를 위한 확산 변환(Diffusion Transformer) 헤드를 결합합니다. 이 모델은 양팔 로봇, 반인간형 로봇, 대형 인간형 로봇 등 다양한 로봇 데이터를 사용하여 학습되었으며, 다양한 로봇 형태, 작업 및 환경에 적응하도록 사후 학습이 가능합니다.
온라인으로 실행:https://go.hyper.ai/2Cjvr

SOMA-X: 통합 파라메트릭 인체 모델 프레임워크
Skinned Multi-Person Linear(SMPL), SMPL-X, Multi-Task Human Representation(MHR), Anny, GarmentMeasurements 등을 포함한 파라메트릭 인체 모델은 인체 재구성, 애니메이션, 시뮬레이션과 같은 분야에서 널리 사용됩니다.
하지만 이러한 모델들은 근본적인 호환성 문제를 안고 있습니다. 각 모델은 고유한 메시 토폴로지, 조인트 계층 구조, 파라미터화 방식을 정의하기 때문에 원활한 통합이 불가능합니다. 따라서 서로 다른 모델의 장점을 결합해야 할 경우(예: 한 모델의 연령 제어 기능과 다른 모델의 모션 데이터를 결합하는 경우), 각 모델 쌍마다 별도의 어댑터를 개발해야 하는 경우가 많습니다. 이는 개발 비용을 증가시킬 뿐만 아니라 시스템의 상호 운용성과 실용적인 적용 가능성을 크게 제한합니다.
이러한 배경에서 NVIDIA Labs는 파라메트릭 인체 모델 간의 호환성 문제를 해결하기 위해 SOMA-X를 출시했습니다. SOMA-X는 지원되는 모든 파라메트릭 인체 모델을 위한 공통 중앙 허브로서 표준화된 인체 토폴로지와 골격 리깅 시스템을 제공합니다. 기존 모델을 교체하는 대신, 각 모델의 정적 형태를 공유 표현으로 매핑하여 통합을 달성합니다. 이 접근 방식을 통해 지원되는 모든 아이덴티티 모델을 사용자 지정 어댑터나 모델별 리디렉션 없이 통합 애니메이션 파이프라인 내에서 구동할 수 있으므로 시스템의 다용성과 확장성이 크게 향상됩니다.
온라인으로 실행:https://go.hyper.ai/UcEI7
Kimodo: 인간 및 로봇 동작 생성 모델
Kimodo는 NVIDIA Research에서 2026년 3월에 출시한 운동학적 모션 확산 모델입니다. 대규모(700시간) 상용 광학 모션 캡처 데이터셋으로 학습된 이 모델은 고품질의 사람 및 휴머노이드 로봇 모션을 생성하며, 텍스트 명령과 전신 포즈 키프레임, 엔드 이펙터 위치/회전, 2D 경로, 2D 웨이포인트와 같은 풍부한 운동학적 제약 조건을 통해 제어할 수 있습니다.
Kimodo는 다음과 같은 다양한 뼈 유형을 지원합니다.
* SOMA: 인체 골격, 30개 관절
* 유니트리 G1: 34개의 관절을 가진 휴머노이드 로봇 골격
* SMPL-X: 22개의 관절을 가진 매개변수 기반 인체 모델.
이 모델은 텍스트 인코더와 모션 제약 메커니즘을 결합한 확산 아키텍처를 사용하여 자연어 설명과 키프레임 제약 조건을 기반으로 부드럽고 자연스러운 모션 시퀀스를 생성할 수 있습니다.
온라인으로 실행:https://go.hyper.ai/p99vI
FDFO: 유한차분 흐름 최적화
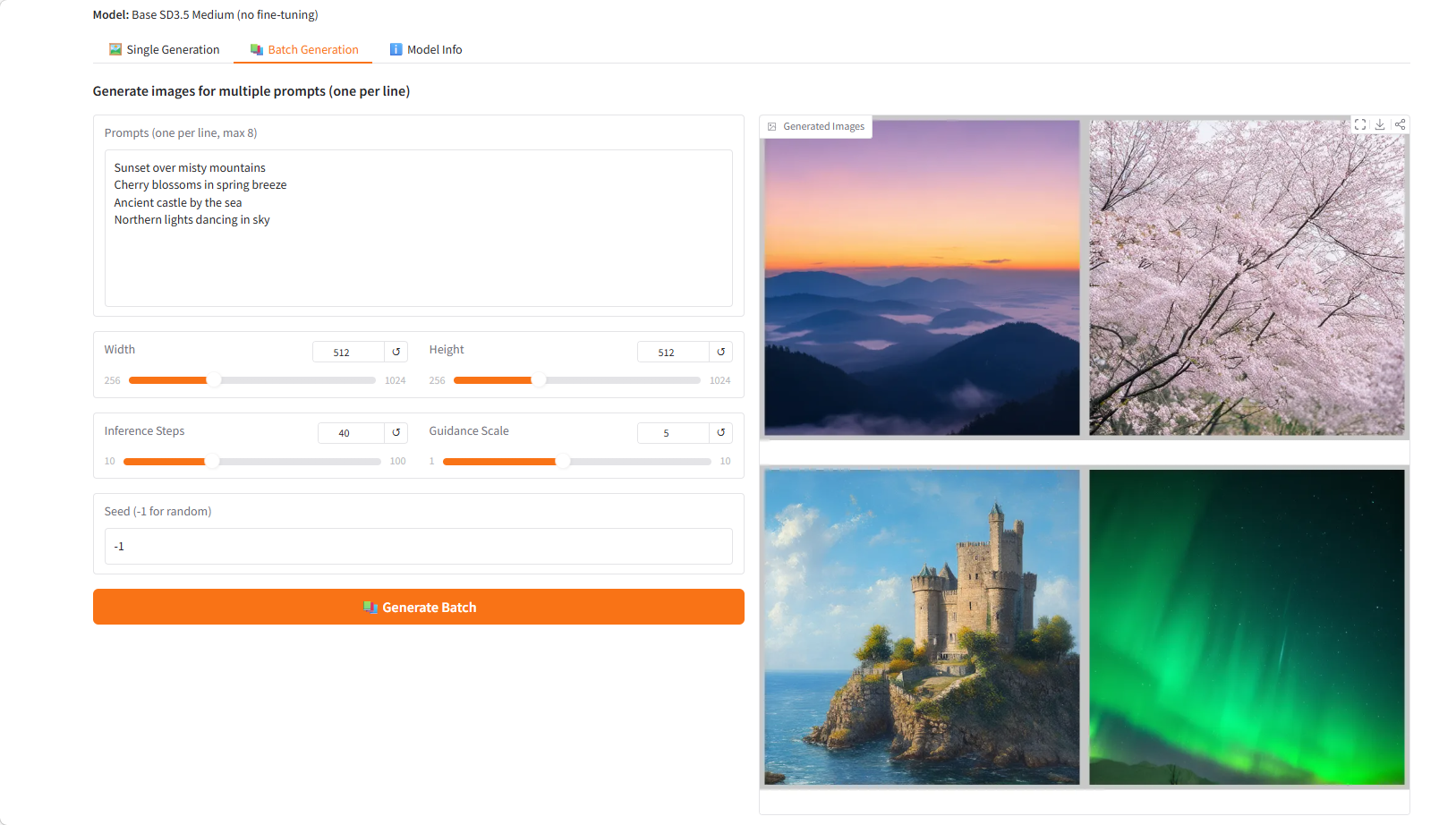
FDFO(Finite Difference Flow Optimization)는 유한차분 기울기 추정을 기반으로 하는 스트리밍 확산 모델 미세 조정 기법으로, NVIDIA에서 2026년 3월에 발표했습니다. 이 기법은 강화 학습 후 시각 언어 모델(VLM) 점수 및/또는 PickScores에서 얻은 보상 신호를 사용하여 Stable Diffusion 3.5 Medium 데이터셋으로 모델을 학습시켜 생성 품질을 최적화합니다.
FDFO는 유한차분법을 통해 효율적이고 안정적인 기울기 계산을 구현함으로써 기존 확산 모델의 미세 조정 과정에서 발생하는 기울기 추정 문제를 해결합니다. 이 방법은 모델의 본래 기능을 유지하면서 생성된 이미지와 텍스트 프롬프트 간의 정렬, 미적 품질 및 사실성을 크게 향상시킵니다.
온라인으로 실행:https://go.hyper.ai/ikihN