Command Palette
Search for a command to run...
オンラインチュートリアル|41,000個のスターを獲得:香港大学のチームが、OpenClawの中核機能を4,000行のコードで実装した超軽量AIアシスタントナノボットをオープンソース化。
画期的なOpenClawは、大規模な言語モデルを単純な対話ツールから、継続的なオンラインインタラクション、マルチプラットフォームでのコラボレーション、ツールの呼び出し、タスクの実行が可能な「デジタル従業員」へと変革しました。しかし、40万行を超える膨大なコードベースは、多くの開発者がOpenClawの学習やさらなる開発を躊躇する要因となっています。
この文脈では、香港大学データインテリジェンス研究所(HKUDS)は、軽量なパーソナルAIアシスタントであるナノボットをオープンソース化した。エージェント機能は、4,000行未満の純粋なPythonコードに圧縮されており、コア機能を維持しながら複雑さを約991 TP3Tも大幅に削減しています。この「削減」設計により、オープンソースコミュニティで大きな成功を収め、現在GitHubでは41,100ものスターを獲得しています。
機能面において、ナノボットは軽量設計のために実用性を犠牲にすることなく、むしろ継続的な改良を通じて機能の限界を絶えず拡大してきました。最新バージョンでは、Office文書の読み取り、OpenAI互換APIによるSSEストリーミング出力、強化されたマルチセッション信頼性、セッション間メモリ、および複数のチャネルにわたる安定した動作をサポートしています。
一方、内蔵のWebUIは引き続き改良されており、多言語切り替え、ダークモード、リアルタイムチャット機能を提供し、WebSocketを介してマルチセッション同時インタラクションを可能にしています。モデルおよびエコシステムレベルでは、nanobotは、Kimi K2.6やMiniMaxなどの複数のモデルインターフェースをサポートしており、LM Studioなどのローカル推論ソリューションとも互換性があります。また、実行時ツール呼び出し(SelfTool)と自動スキル発見(Dream)のメカニズムを導入することで、エージェントが能力の限界を動的に拡張できるようにする。
さらに、本プロジェクトは、コンテキスト圧縮、アトミックセッション書き込みと自動修復メカニズム、長文メッセージ分割(Telegram)、メールループ保護、より厳密なサンドボックス実行環境など、エンジニアリングの詳細において継続的に改良されてきました。これらの改善により、実際の運用環境におけるシステムの安定性と可用性が大幅に向上しています。MCP(Model Context Protocol)と組み合わせることで、開発者は外部ツールやサービスを柔軟に統合し、より複雑な自動化プロセスを構築することも可能です。
さらに重要なことに、ナノボットを取り巻く開発障壁もさらに低くなっています。現在、HyperAIのチュートリアルセクションに、「Nanobot:超軽量パーソナルAIアシスタント」が追加されました。環境設定が完了したら、vLLMを使用してGLM-4.7-Flashモデルをローカルにデプロイします。ご興味があれば、HyperAIでこの軽量AIエージェントをぜひお試しください。使い方は簡単です!
オンラインで実行:
このチュートリアルには以下の内容が含まれています。
- ローカルモデル展開構成
- Lark統合の手順
- 基本的な使用方法とテスト
その他のオンラインチュートリアル:
より詳しい情報については、弊社の公式ウェブサイトをご覧ください。
デモの実行
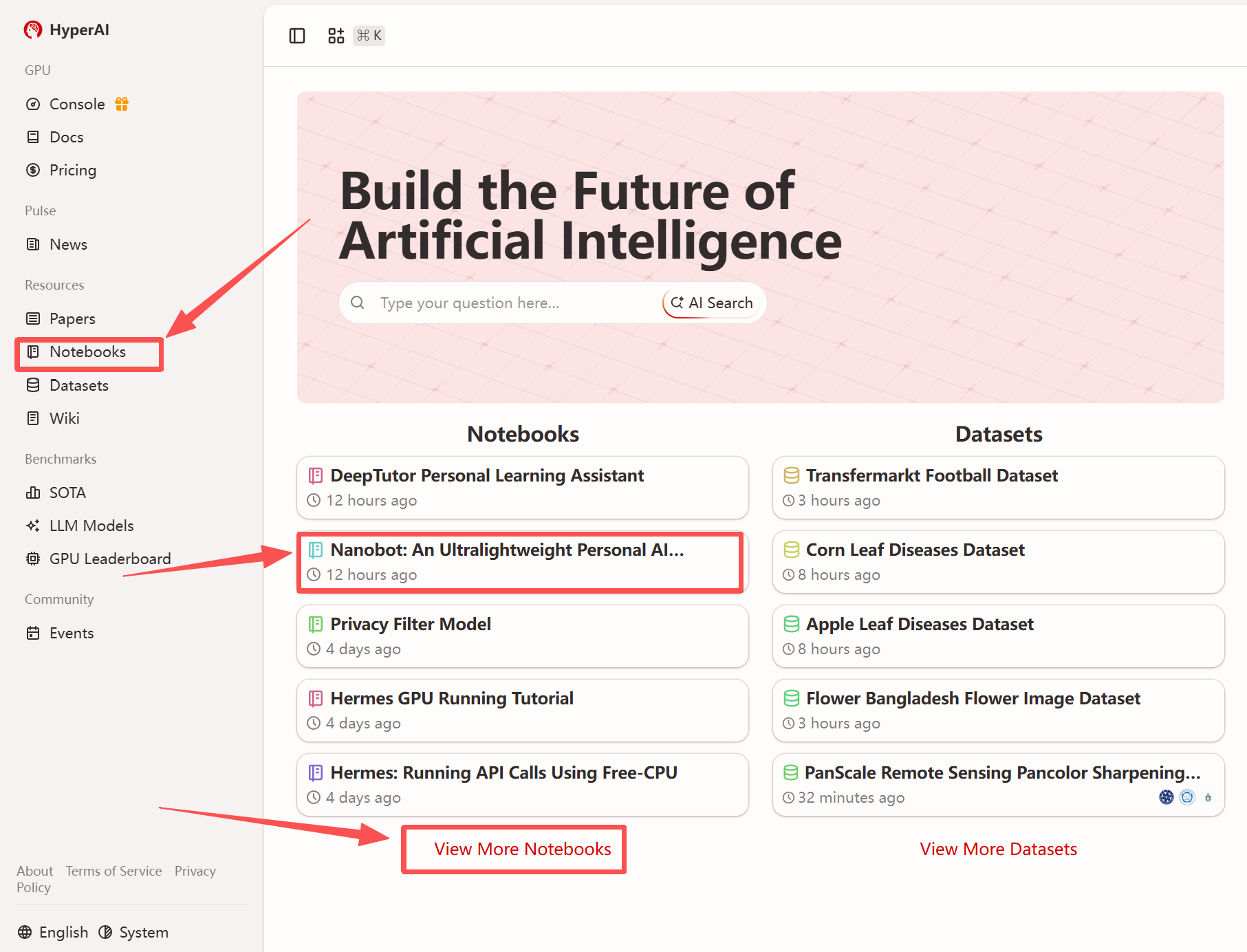
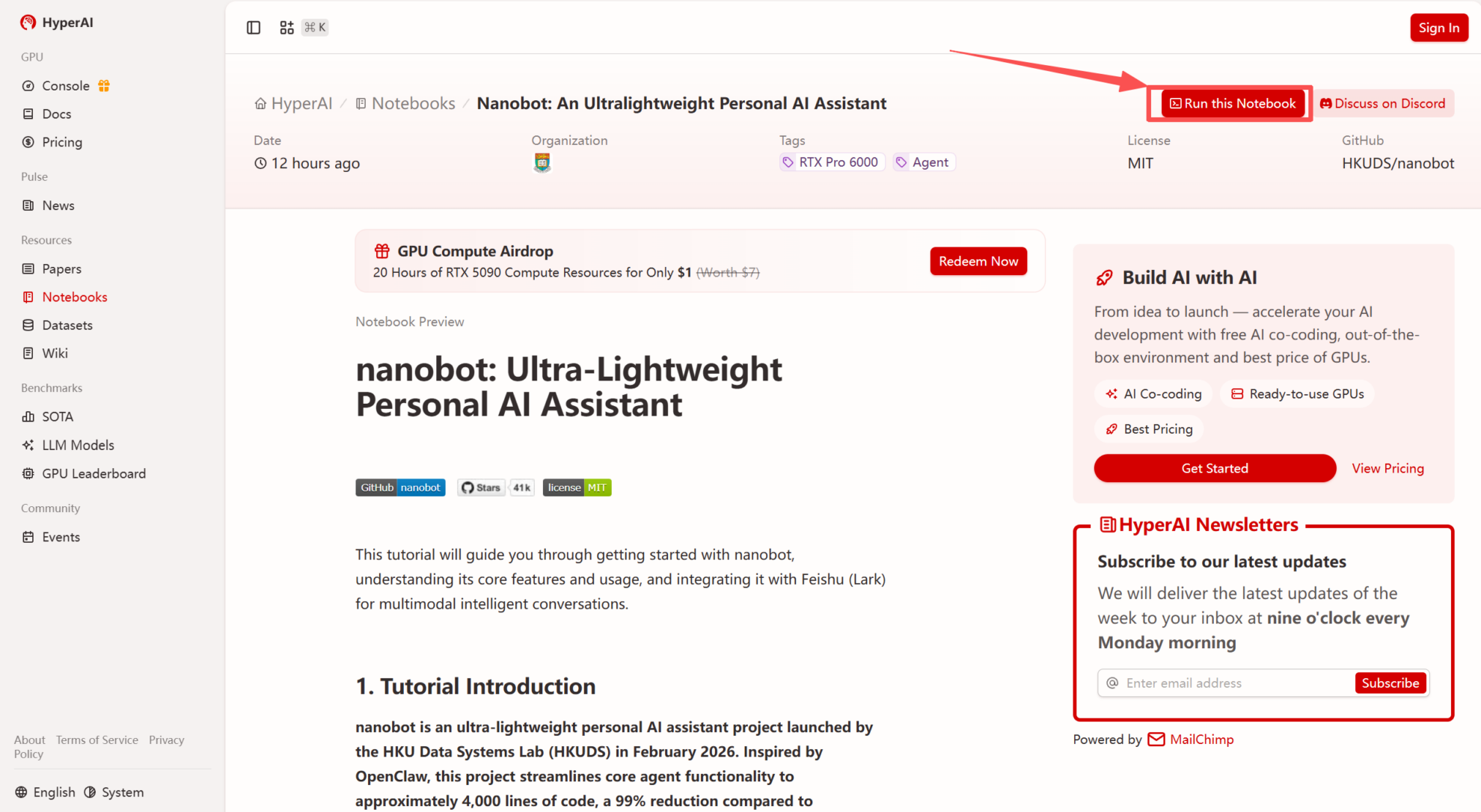
1. hyper.aiのホームページにアクセスしたら、「チュートリアル」ページを選択するか、「その他のチュートリアルを見る」をクリックし、「Nanobot: 超軽量パーソナルAIアシスタント」を選択して、「このチュートリアルを実行する」をクリックします。
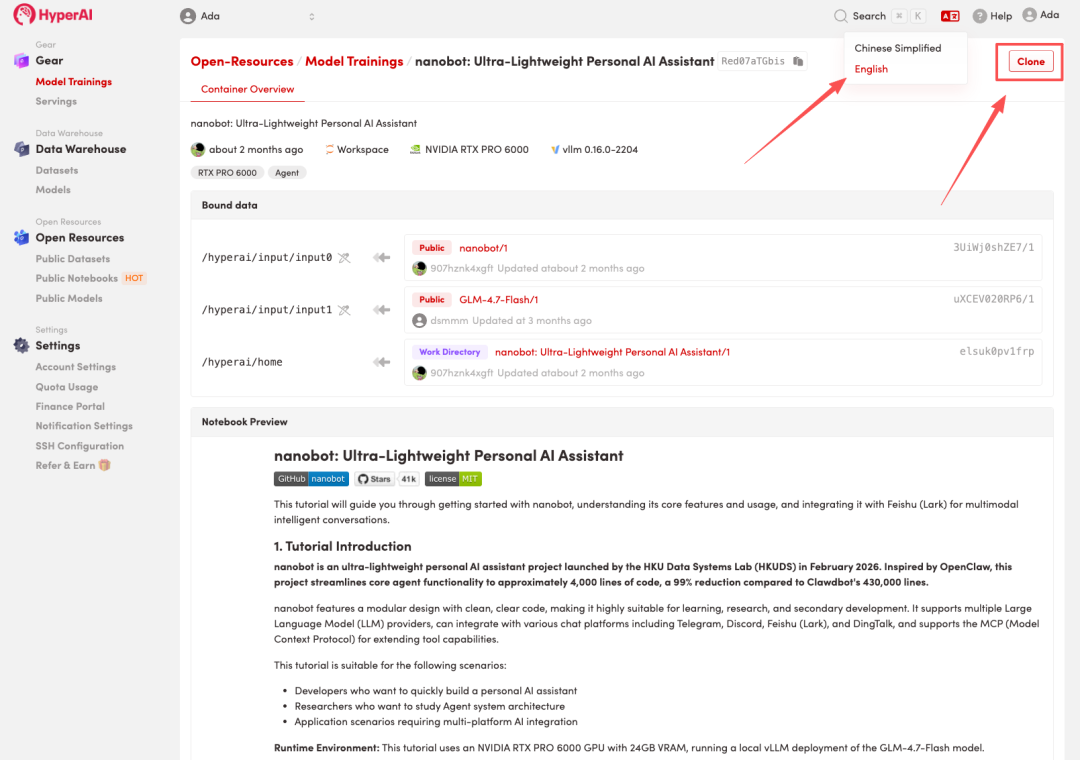
2. ページがリダイレクトされたら、右上隅の「複製」をクリックして、チュートリアルを独自のコンテナーに複製します。
注:ページの右上で言語を切り替えることができます。現在、中国語と英語が利用可能です。このチュートリアルでは英語で手順を説明します。
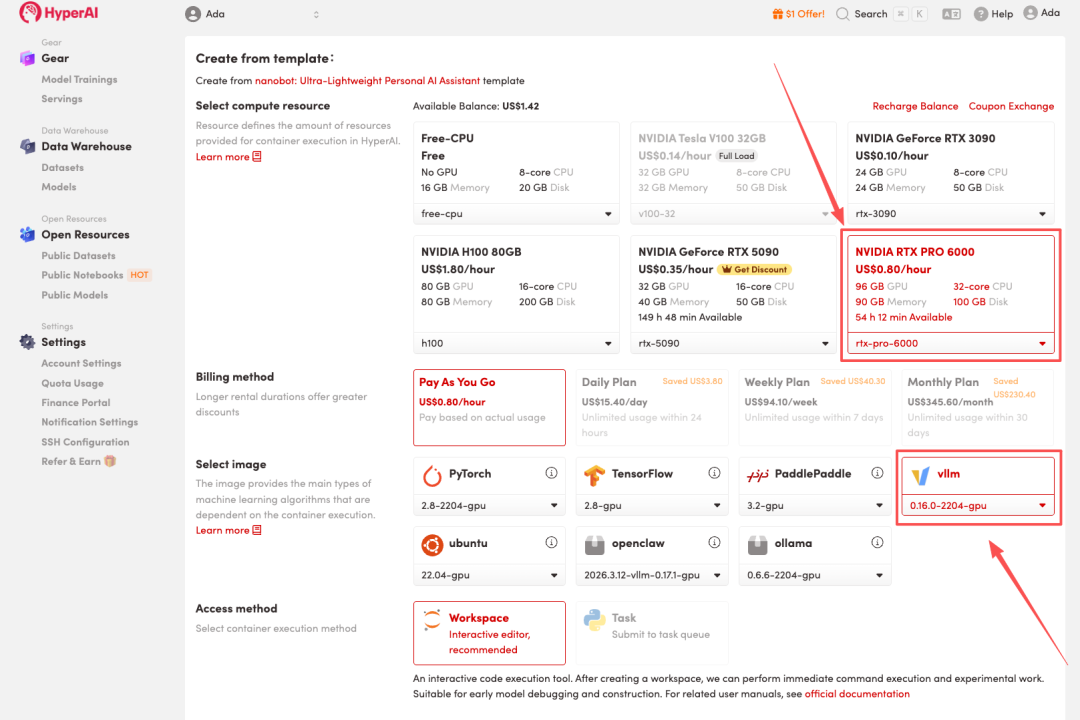
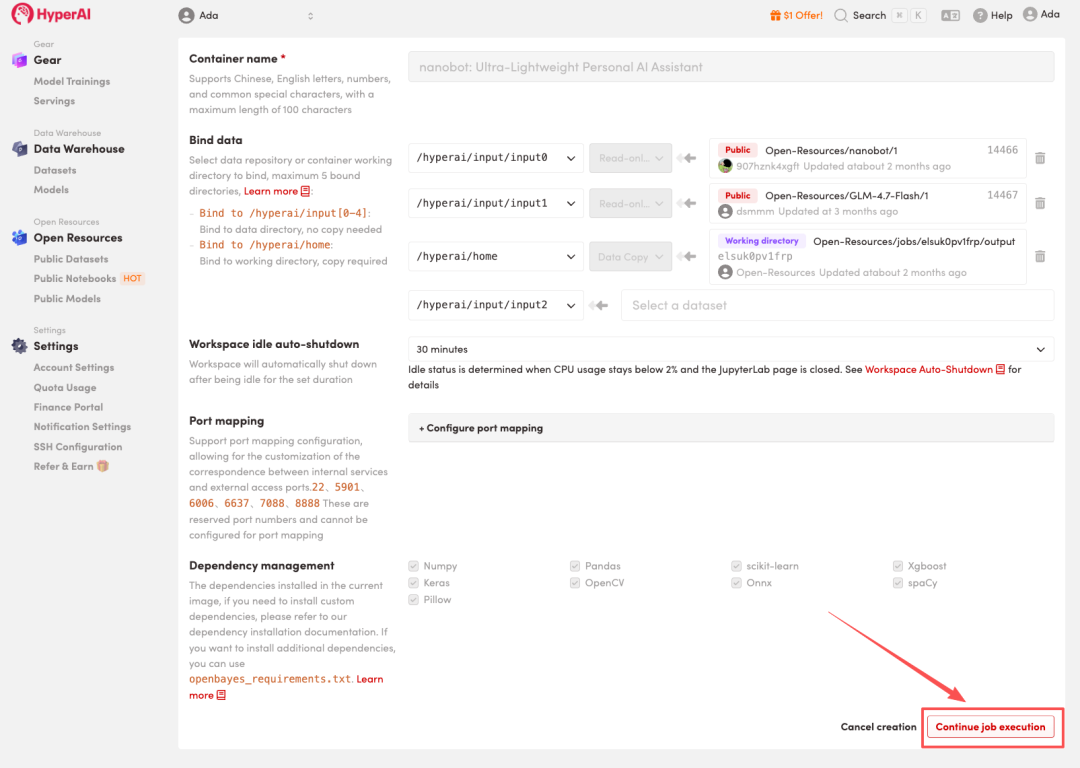
3. 「NVIDIA RTX PRO6000」と「vLLM」のイメージを選択し、「ジョブの実行を続行」をクリックします。
HyperAI は新規ユーザー向けに登録ボーナスを提供しています。わずか $1 で、RTX 5090 のコンピューティング パワー (元の価格は $7) を 20 時間利用でき、リソースは無期限に有効です。
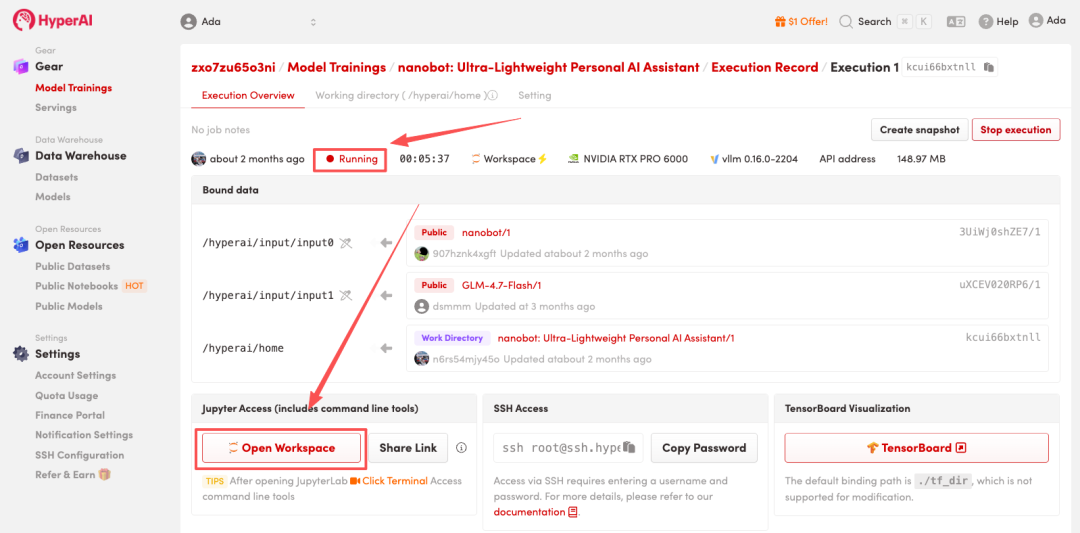
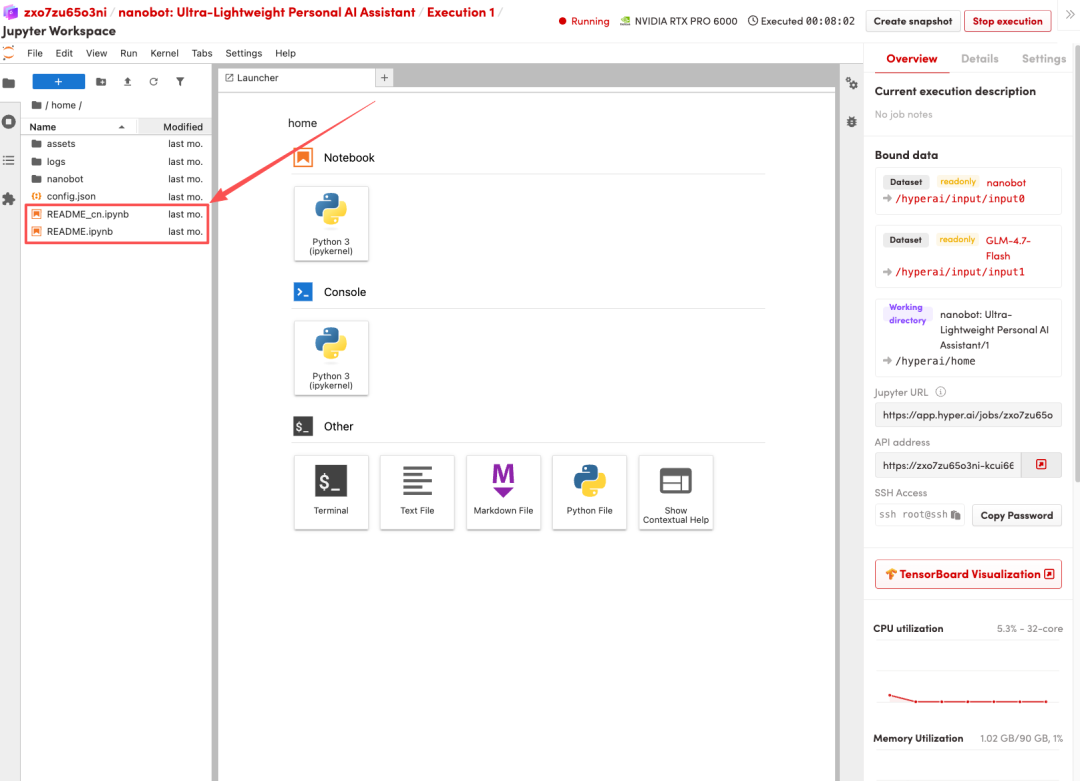
4. リソースが割り当てられるのを待ちます。ステータスが「実行中」に変わったら、「ワークスペースを開く」をクリックしてJupyterワークスペースに入ります。
エフェクト表示
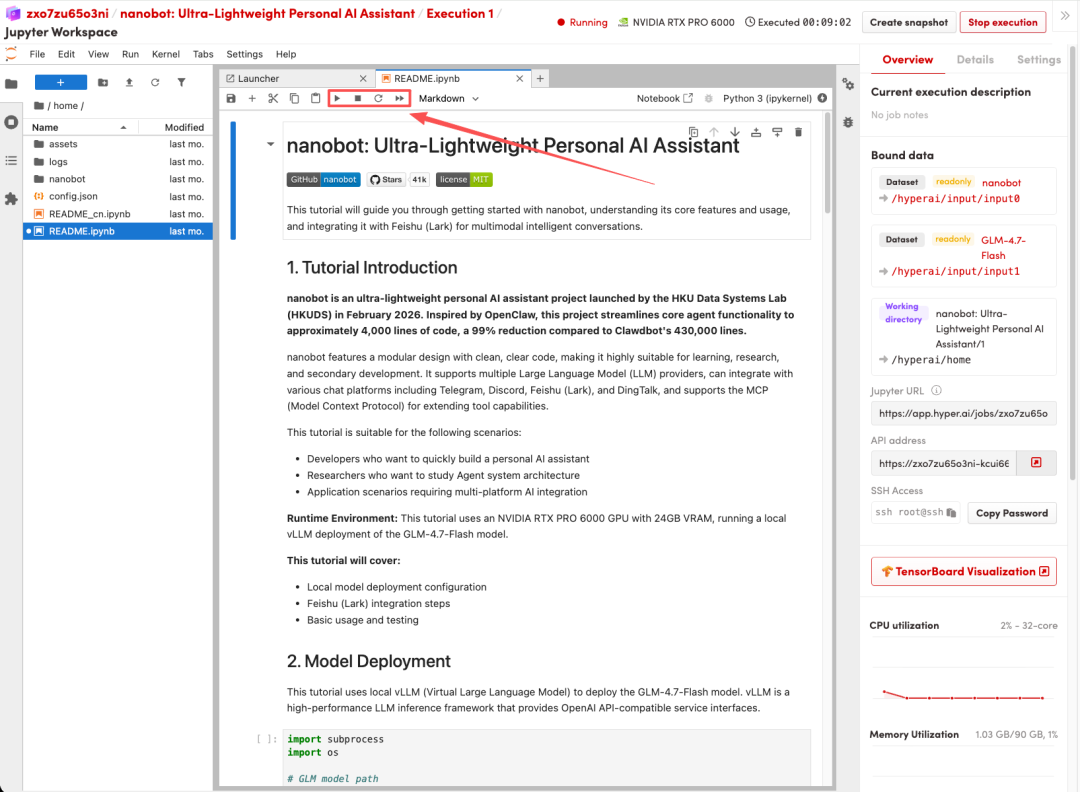
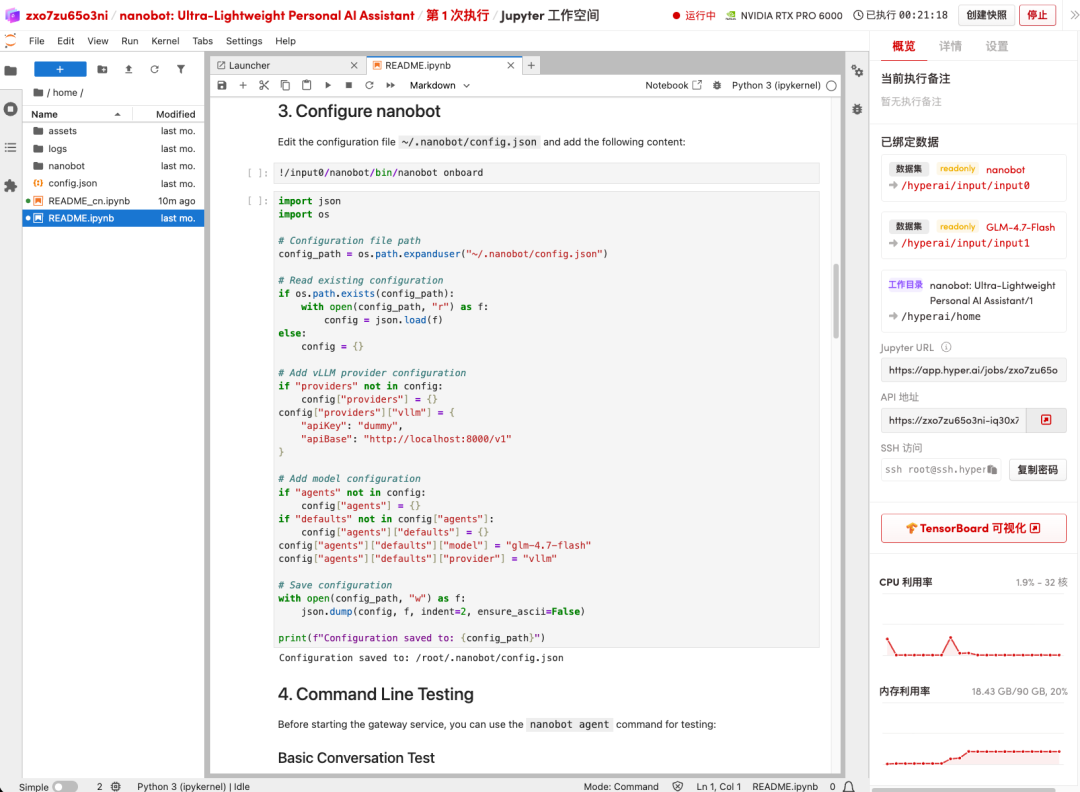
ページがリダイレクトされたら、左側のREADMEファイルをクリックし、ファイル内の手順に従って設定、コマンドラインのテスト、および関連アプリケーション(Lark)の統合を行ってください。
チームについて
ナノボットは、今年2月に香港大学発展システム部(HKUDS)によって正式にオープンソース化されました。チームリーダーは、香港大学の助教授であり博士課程指導教官でもある黄超氏です。彼の研究分野は、大規模AIエージェント、言語モデル、グラフ機械学習など多岐にわたります。彼の研究成果は、Google Scholarで1万7000回以上引用されています。
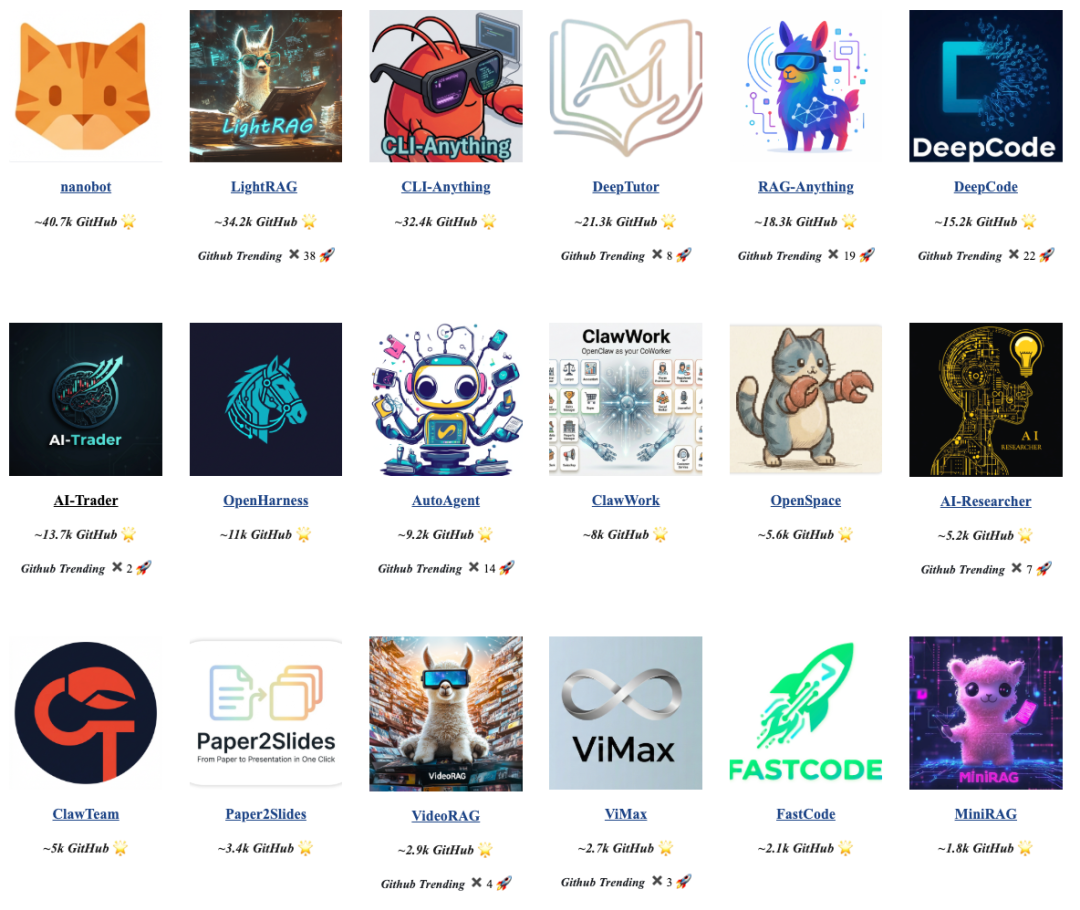
黄超教授とそのチームは、ナノボットに加えて、LightRAGやCLI-Anythingなど、他にも影響力の大きいオープンソースプロジェクトを数多く発表しています。香港大学歯学部(HKUDS)のGitHubオープンソースプラットフォームは、24万以上のGitHubスターを獲得し、世界トップ50にランクインしており、GitHubトレンドリストにも100回以上登場しています。