Command Palette
Search for a command to run...
物理情報のための機械学習における画期的な進歩!革新的なGNNアーキテクチャにより、複雑な多体系の動的システムの正確な予測が可能になり、ロボット工学、航空宇宙、材料科学の分野に新たな力を与えます。

近年、人工知能は画像認識や自然言語処理などの分野で大きな進歩を遂げてきましたが、複雑な物理システムのモデリングにおいては依然として多くの課題に直面しています。粒子状物質の運動、分子動力学、人間の動作、機械システムのシミュレーションなど、現実世界の問題の多くは多体力学系のカテゴリーに属します。これらのシステムは通常、非常に複雑な相互作用を持ち、運動量保存則やエネルギー保存則といった基本的な物理法則に厳密に従う必要があります。
従来の数値シミュレーション方法は、これらのシステムを正確に記述できますが、特に長期のシミュレーションや大規模な粒子システムが必要な場合、計算リソースが大量に消費されるため、計算コストが高くなることがよくあります。同時に、機械学習モデルはデータから複雑な関係性を学習できますが、物理法則に対する制約が欠如していることが多く、エラーが蓄積したり、長期予測においてシステムの相違が生じたりします。
このような背景から、物理情報における機械学習は徐々に研究のホットスポットとなってきました。グラフ ニューラル ネットワーク (GNN) に基づく動的モデリング手法は、近年、広く注目を集めています。 生成ニューラルネットワーク(GNN)は、粒子や剛体間の相互作用を自然に表現できます。ノードはオブジェクトを、エッジは相互作用を表します。そのため、GNNは多体系のシミュレーションに適しています。しかし、GNNのようなデータ駆動型の手法は、物理的な一貫性、解釈可能性、そして一般化能力に欠ける場合が多くあります。
この問題を解決するには、スイス連邦工科大学ローザンヌ校(EPFL)の研究者らは、GNNの学習能力と物理学に基づく帰納的バイアスを組み合わせた、新たな物理駆動型GNNアーキテクチャ「DYNAMI-CAL GraphNet」を提案しました。線形運動量保存則と角運動量保存則をモデル構造に直接組み込むことで、これら2つの保存則が明示的に保証されます。
実験結果は、ロボット工学、航空宇宙工学、材料科学といった複雑な多体系力学系の正確で解釈可能なリアルタイムモデリングが求められる分野において、DYNAMI-CAL GRAPHNETが大きな利点をもたらすことを示しています。この手法は、基本的な保存則に準拠した物理的に一貫性がありスケーラブルな予測機能を提供することで、異種相互作用や外力を効率的に処理しながら、システム内の力とトルクを推定することができます。
「動的システムの線形および角運動量を保存する物理学に基づくグラフニューラルネットワーク」と題された関連研究成果が Nature Communications に掲載されました。
研究のハイライト:
* 等変 GNN アーキテクチャでは、DYNAMI-CAL GRAPHNET は、内部のペアワイズ相互作用のレベルでニュートンの第 3 法則を適用することにより、線形運動量と角運動量の保存をネットワーク構造に直接組み込みます。
この方法は、複雑な非中心相互作用や散逸効果においても物理的に一貫した予測を提供し、さまざまなシステムに適用できます。
このアーキテクチャは、制御システムの設計、機械プロセスの最適化、自然システムと工学システムの動的動作解析において大きな価値を持っています。
用紙のアドレス:
https://www.nature.com/articles/s41467-025-67802-5
完全な PDF を取得するには、当社の公式 WeChat アカウントをフォローし、バックグラウンドで「Physics GNN」と返信してください。
4つの異なるタイプの動的システムデータセット
モデルの一般性を検証するために、研究チームは動的システムの 4 つの異なるデータセットで実験を実施しました。これらのデータセットは、物理シミュレーションから実世界のデータまで、さまざまなシナリオをカバーしています。その中には以下のようなものがあります。
粒子6自由度衝突データセット
研究チームは6自由度粒子衝突システムを構築しました。このシステムでは、各粒子は並進運動だけでなく回転運動も可能であり、6自由度(6-DoF)を有します。
トレーニング データセットは 5 つの軌跡で構成され、各軌跡には 60 個の同一球が含まれています。これらの球体は長方形の閉空間に閉じ込められています。初期の線速度はランダムに割り当てられ、1~2 m/s の範囲で均一にサンプリングされます。各軌跡には1500のタイムステップが含まれており、データサンプリング間隔は10⁻⁴秒です。また、基盤となる物理シミュレーションのタイムステップは10⁻⁶秒です。各タイムステップにおいて、各球体の位置、線速度、角速度の状態情報が記録されます。
検証セットには、トレーニングで使用されなかった軌跡が1つ含まれています。システムは60個の球体と200個の時間ステップで構成されています。初期速度の大きさはまだトレーニング範囲内ですが、速度の方向はモデルの一般化能力をテストするために使用されるトレーニング データとは異なります。
補間テスト セットは検証セットと同じように設定されますが、軌跡の長さは 500 タイム ステップです。トレーニング分布範囲内でのモデルの長期予測能力を評価するために使用されます。
制約N体系
古典的な制約N体動力学問題では、混合相互作用型および構造的に制約されたシステムにおけるモデルの適用性を評価するために、研究者らは、文献で提案されている制約付き N 体データセットを使用しました。このデータセットは、システムを構築するために剛性スティックとヒンジの形で完全な制約を導入することにより、Thomas Kipf らによって提案された 3 次元荷電粒子シミュレーションを拡張します。
人間のモーションキャプチャデータ
3 番目のデータセットは、CMU モーション キャプチャ データベースの実際の人間のモーション データから取得されます。このデータセットは、歩行、走行、ジャンプなどの動作中の人間の骨格関節の3次元的な位置変化を記録します。実験では、研究者は被験者1名の「歩行」データを選択し、人間の骨格関節をグラフ構造としてモデル化しました。グラフ構造では、ノードが関節、エッジが骨の連結を表しています。この実験は主に、現実世界の複雑な動作システムにおけるモデルの性能を検証するために使用されました。
タンパク質分子動力学
最後のデータセットは、タンパク質分子動力学シミュレーションから得られたものです。研究者らは、明示的な水分子とイオンの環境におけるタンパク質の原子レベルの動きを記録する、MDAnalysis ツールキットを介して取得されたアポアデノシンキナーゼ (AdK) 平衡軌跡データセットを使用しました。
DYNAMI-CAL GraphNet: 物理情報駆動型GNNアーキテクチャ
DYNAMI-CAL GraphNetの核となるアイデアは、物理的保存則をニューラルネットワーク構造に直接埋め込むことです。その全体的なアーキテクチャを下図に示します。それは 3 つの主要な段階に分けられます。
① 図式表現
②線形運動量と角運動量を保存するスカラー化ベクトル化方式
③ 時空間メッセージ伝送。
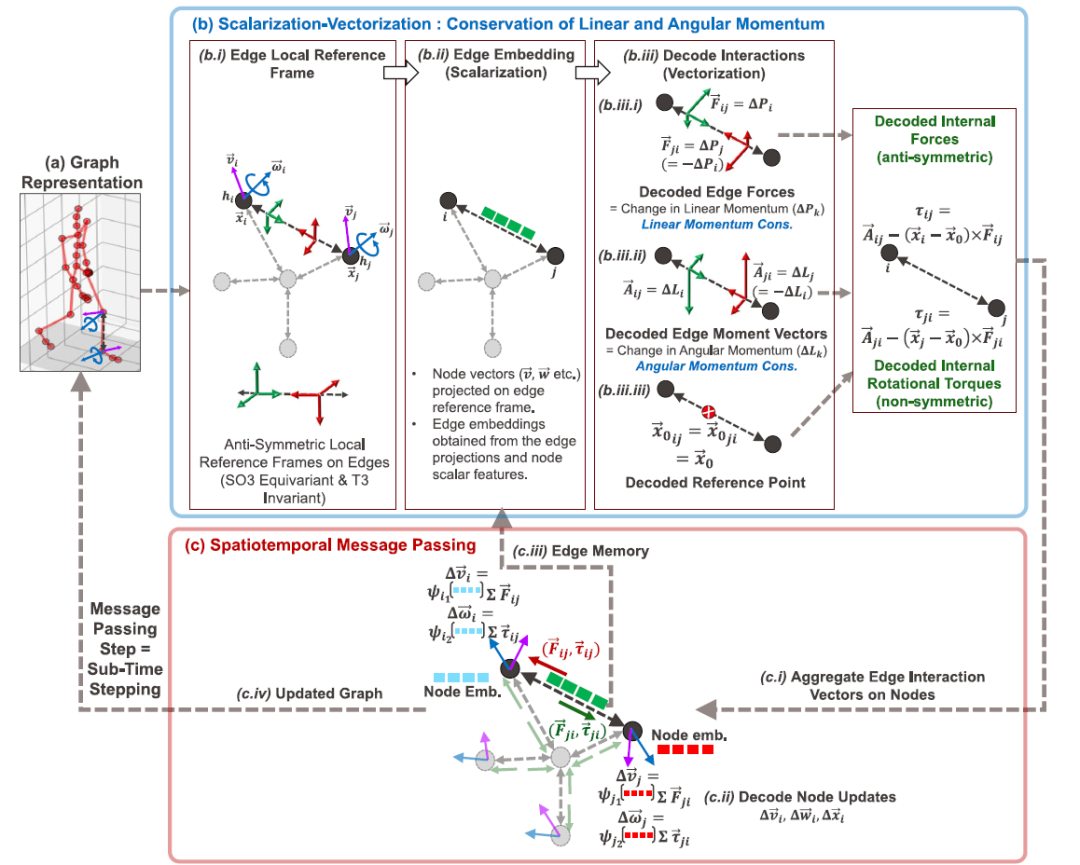
フェーズ1: グラフ表現
まず、研究者らは多体系をグラフとして表現しました。ノードはオブジェクトまたは粒子を表し、エッジはオブジェクト間の相互作用を表します。各ノードには、位置、速度、角速度、オブジェクトのプロパティ (質量、電荷など) などの複数の機能が含まれており、エッジは 2 つのオブジェクト間の相対的な位置と相互作用関係を表します。
フェーズ2:スカラー化-ベクトル化
* スカラー化
スカラー化フェーズでは、モデルはノードとエッジのベクトル情報を高次元スカラー埋め込みに変換します。重要な革新は、各エッジに、3次元回転に対する等変性SO(3)、並進不変性T(3)、ノード交換時の反対称性などの特性を持つ局所直交参照座標系が割り当てられていることです。実際の応用では、これはエッジの方向が反転すると3つの基底ベクトルの符号が変わることを意味し、これにより、後続のすべての射影および相互作用計算が反対称性を満たすことが保証されます。
スカラー化ステップでは、ノードのベクトル特徴(速度や角速度など)をこれらのエッジのローカル座標系に投影し、スカラー成分を取得します。これらのスカラーは、他のノードのスカラー特徴と組み合わせることで、ノードの順序に依存しないエッジ埋め込みを形成します。この方法は、システムの対称性を維持しながら、ローカル相互作用に関する方向情報とスカラー情報の両方をエンコードします。
* ベクトル化
ベクトル化フェーズでは、モデルはエッジ埋め込みベクトルから内部力と回転トルクをデコードします。これらの力はノードに集約され、粒子の線速度、角速度、および位置が更新されます。モデル設計では力とモーメントが反対称性を満たすことが義務付けられているため、システムは自然に線形運動量と角運動量の保存則を満たします。
フェーズ3: 時空間メッセージパッシング
各エッジにおける物理的に一貫した内部力とモーメントを計算した後このモデルは、DYNAMI-CAL GRAPHNET の時空間メッセージ パッシング メカニズムを実行します。
まず、デコードされたエッジレベルの内力と回転トルクを接続ノード上で集約し、各ノードにおける合力と合トルクを求める。次に、これらのベクトルにノードスカラー埋め込みによって得られた係数を乗じて、ノードの線速度と角速度を更新する。次に、更新された位置は暗黙的なオイラー積分を用いて計算される。この処理は、DYNAMI-CAL GRAPHNETのメッセージパッシング層を構成する。
次のエッジ エンコーディング ラウンドでは、この徐々に進化する表現が各エッジの潜在メモリとして保存され、モデルが真の時空間推論を実現できるようになります。
この設計により、DYNAMI-CAL GRAPHNET は、各計算ステップで物理ベースの誘導バイアスを維持しながら、複数の時間スケールにわたってシステムの動的動作をキャプチャできます。
実験結果: 安定性と一般化能力が大幅に向上しました。
研究者らは、シミュレーションと現実世界の物理システムの両方を網羅した4つのベンチマークタスクにおいて、DYNAMI-CAL GraphNetの性能を評価しました。複数のデータセットを用いた実験により、DYNAMI-CAL GraphNetは複数の指標において既存の手法よりも優れていることが実証されました。
粒状6自由度衝突ベンチマーク
直方体容器内の60個の球体の6自由度運動について、転がり予測実験を実施しました。下の図は、DYNAMI-CAL GRAPHNETとGNSの比較を示しています。
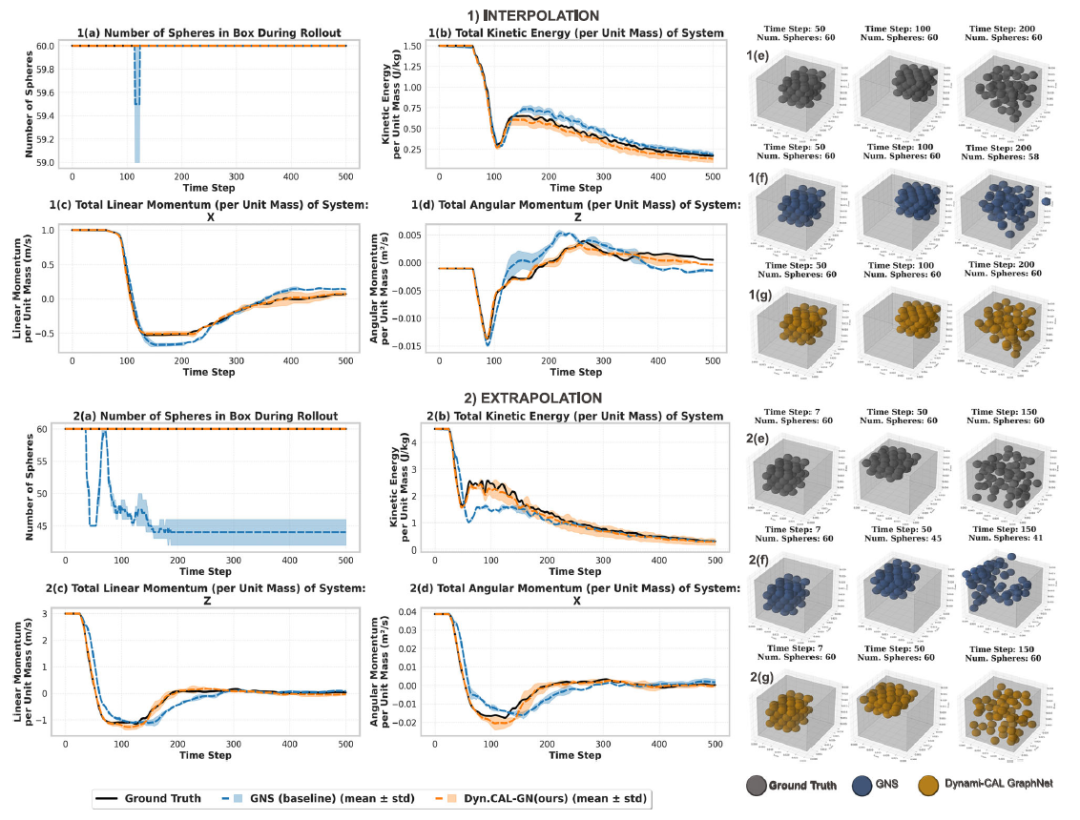
DYNAMI-CAL GRAPHNET は、すべての粒子を正常に保存し、運動エネルギーの減衰を正確に追跡し、500 の予測ステップにわたって一貫した運動量の進化を維持し、さまざまなランダム シード間での差異を最小限に抑えました。対照的に、GNSは外挿シナリオにおいてより早期に発散し、粒子の脱出を示します。これは、高運動量条件下では衝突速度が上昇し、システムの制約を維持するために衝撃接触力の正確な計算が必要となるためです。GNSは一般化が不十分であり、脱出しない粒子に対しても、その予測は実際の物理的挙動から徐々に乖離していきます。
これらの結果は次のことを示しています。DYNAMI-CAL GRAPHNET は、散逸性、接触密度の高い 6-DoF 動的システムのモデリングにおいて、優れた堅牢性と一般化能力を発揮します。
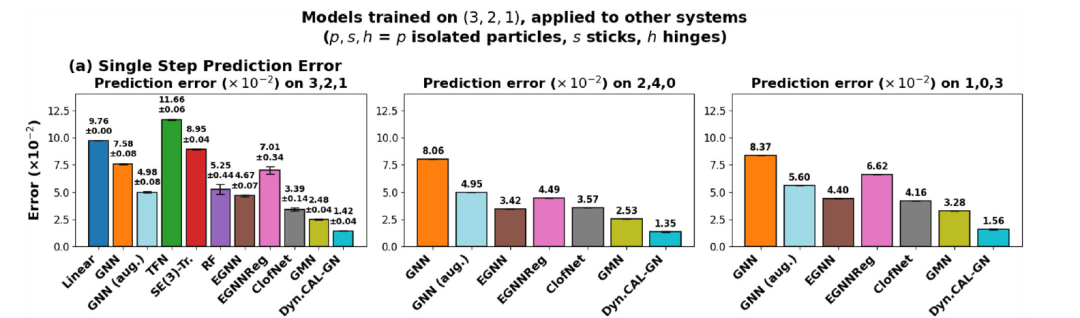
制約付きN体動力学
全体的に、DYNAMI-CAL GRAPHNET は、シングルステップ予測タスクとマルチステップ予測タスクの両方で、すべてのベースライン モデルよりも優れています。
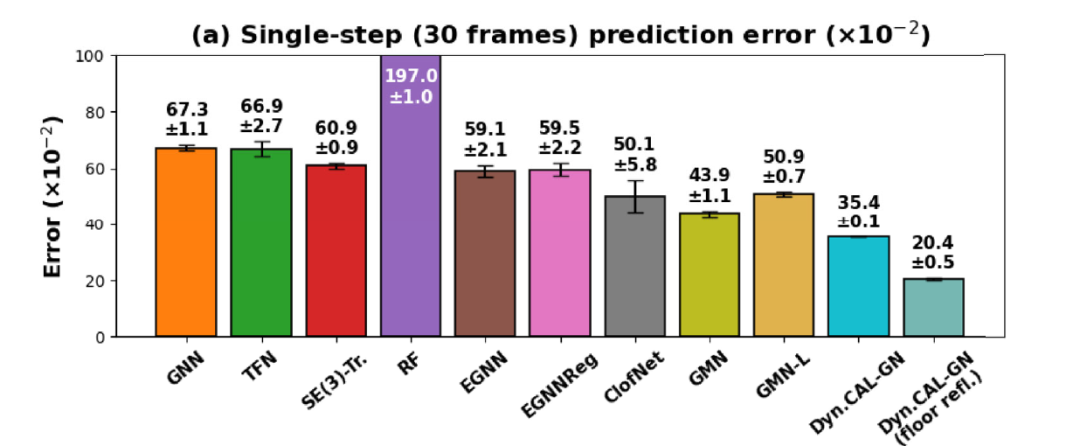
下の図aでは、DYNAMI-CAL GRAPHNETが様々なステム構成において最も低いシングルステップ予測誤差を達成し、GMN、EGNN、ClofNetを上回っています。その後、研究者らはランダム回転と並進の強化を導入し、非等変GNNの性能を大幅に向上させ、等変モデルとの差を縮めました。しかし、データ量の増加と明示的な接触幾何学的対称性を適用したにもかかわらず、GNN(8月)は全てのテスト構成において、最も単純な等変モデルであるEGNNとDYNAMI-CAL GRAPHNETに依然として遅れをとっています。
これは次のことを示しています:アーキテクチャにおける誘導バイアスは、制約された物理的ダイナミクスを一般化するために依然として重要です。
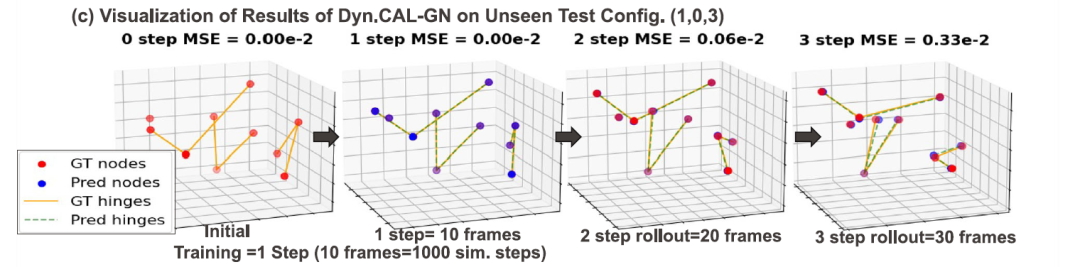
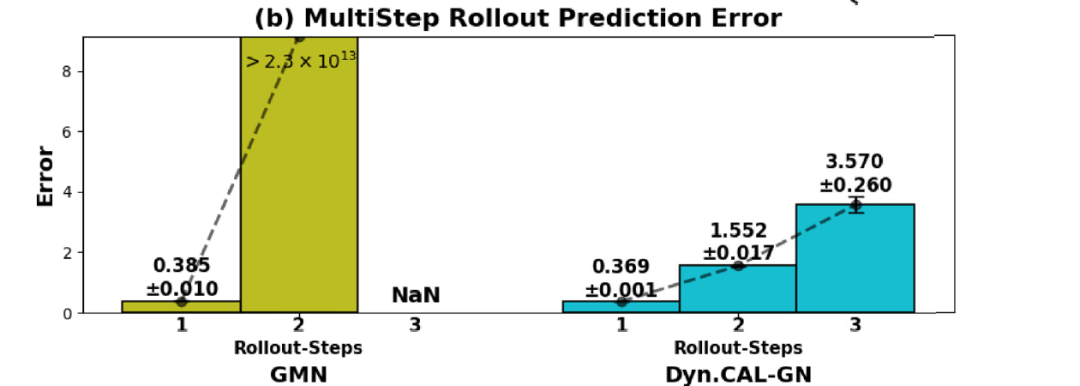
多段階ロールアウト予測について、下の図bはDYNAMI-CAL GRAPHNETとGMNを比較したものです。結果は…DYNAMI-CAL GRAPHNETは、最大4ステップ(1ステップ=10フレーム=1000シミュレーションステップ)の多段階ローリング予測において、長期にわたって安定した予測精度を維持できます。GMN の予測誤差は徐々に蓄積され、時間の経過とともに大幅に増加します。
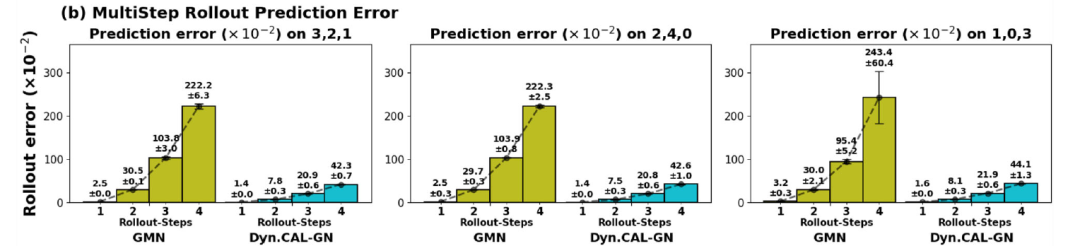
下の図cは、未知の(1, 0, 3)構造構成における定性的な転がり予測結果を示しています。モデルは異なるトポロジーを持つデータに対してシングルステップの教師あり学習のみで学習されましたが、提案された方法は、制約されたシステムの動的な動作を正確に捉えることができます。
人間の動作予測
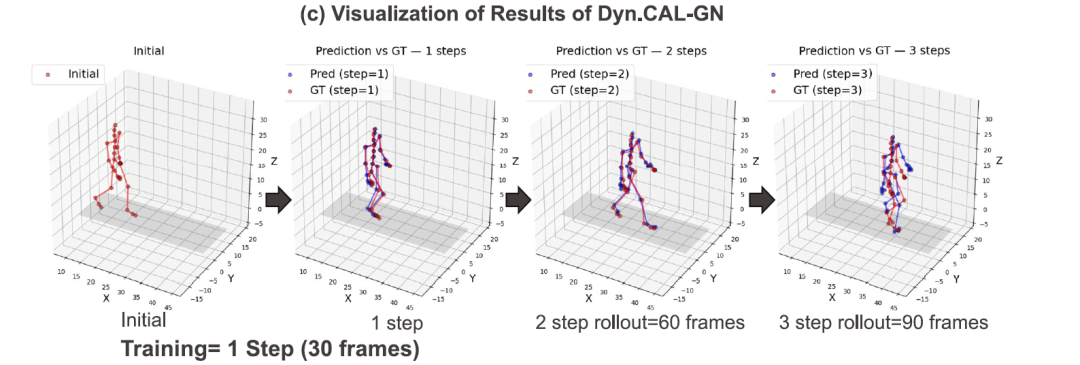
人間のモーションキャプチャデータでは、モデルはシングルステップの教師ありトレーニングのみを使用しているにもかかわらず、マルチステップ予測で安定した軌道を維持でき、モデルが人間の動きの時空間動的構造を正常に学習したことを示しています。
下の図aは、CMUの人間歩行ベンチマークにおける1歩あたりの予測精度を示しています。結果は次のことを示しています。DYNAMI-CAL GRAPHNET は、すべての方法の中で最も低いエラーを達成し、GMN を上回ります。 GMN は 19 個のジョイントを使用して人間の骨格を表現し、手動で定義された 6 つのリジッド接続を通じて拘束を適用し、次に手動で設計された順方向運動学 (FK) モジュールを通じて拘束を適用します。
下の図bは、モデルが単一ステップの監督のみを使用してトレーニングされているにもかかわらず、DYNAMI-CAL GRAPHNET は、GMN が急速に発散する一方で、多段階圧延予測において安定した精度を維持します。
下の図 c の定性的な結果は、予測された関節軌道が連続的かつ一貫しており、物理的に合理的で、実際の動きと非常に一致しており、90 フレームの将来予測でも安定した状態を維持できることをさらに示しています。
タンパク質ダイナミクス
最後に、研究者らは、このモデルが複雑な熱擾乱駆動型タンパク質ダイナミクスをモデル化する能力も評価しました。その結果、以下のことが示されました。DYNAMI-CAL GRAPHNET は、タンパク質などの複雑で細粒度のシステムにおいて、優れた運動モデリング機能を発揮します。微細構造の振動を捉えるだけでなく、大規模な構造変化を予測することもでき、その予測精度は多くのベースライン手法を上回ります。
物理シミュレーションから具現化された知能の世界モデルへ
人工知能技術の発展に伴い、新たな研究分野、すなわち組み込みAIが急速に勢いを増しています。従来のAIが主にテキストや画像を処理するのに対し、組み込みAIはインテリジェントエージェントと現実の物理世界との相互作用を重視しています。ロボット、自動運転システム、インテリジェント製造設備などは、いずれも組み込みAIの重要な応用分野です。これらのシステムでは、インテリジェントエージェントは環境を認識するだけでなく、環境の変化を予測し、それに応じて行動戦略を策定する必要があります。つまり、物理世界の動的な挙動を理解し、予測する能力が不可欠となるのです。
近年、ますます多くの研究者が「世界モデル」という概念を提唱しています。世界モデルとは、環境の動的な変化をシミュレートできる内部モデルを指し、知能エージェントが「頭の中で」未来を予測することを可能にします。しかし、現実的で信頼性の高い世界モデルを構築することは容易ではありません。現実世界では、物体の運動は通常、運動量保存則、摩擦、衝突力学といった複雑な物理法則によって制約されます。モデルがこれらの法則を正確に表現できない場合、複数の推論ステップを経て予測結果が現実から容易に乖離する可能性があります。このような背景から、DYNAMI-CAL GraphNet のような物理情報ニューラル ネットワークは、具現化された知能の開発に向けた新しい技術的アプローチを提供します。
さらに、複雑な物理システムの進化を効率的かつ正確に予測する技術において、業界は大きな進歩を遂げてきました。物理システムは多くの場合、複数の時間的・空間的スケールにわたって進化しますが、多くの学習モデルは短期的なダイナミクスのみに基づいて学習されます。長期予測に使用すると、複雑なシステムでは誤差が蓄積され、モデルの不安定性につながります。
この文脈では、Polymathic AI Collaborationの研究チームは、上記の課題に対処するための一連の新しい手法を導入しました。彼らは、13億のパラメータを持ち、Transformerをコアアーキテクチャとして採用し、主に流体のような連続体ダイナミクスを指向した「Walrus」と呼ばれる基本モデルを提案しました。 Walrusは、事前学習段階で、天体物理学、地球科学、レオロジー、プラズマ物理学、音響学、古典流体力学など、複数の分野を網羅する19の非常に多様な物理シナリオをカバーします。実験結果では、Walrusが下流タスクの短期予測と長期予測の両方において従来のベースラインモデルを上回り、事前学習データ分布全体にわたってより強力な汎化性能を示すことが実証されています。
* 論文タイトル: Walrus: 連続体ダイナミクスのためのクロスドメイン基盤モデル
* 論文リンク:https://arxiv.org/abs/2511.15684
物理AIモデルの構築は、分子動力学、材料科学、気候モデルといった複雑なシステムのシミュレーションを科学者がより効率的に行うのに役立つ一方で、知能ロボットに世界に対するより現実的な理解を提供することにもつながります。ある意味で、人工知能が物理世界を真に理解できるようにすることは、汎用人工知能への重要な一歩となるかもしれません。
参考文献:
1.https://www.nature.com/articles/s41467-025-67802-5
2.https://mp.weixin.qq.com/s/fElxywueQ_an44rXkbjZ1A