Command Palette
Search for a command to run...
دروس تعليمية عبر الإنترنت | انشر بسهولة أحدث نماذج الذكاء الاصطناعي الفيزيائي من NVIDIA، والتي تغطي الروبوتات الشبيهة بالبشر، وتوليد حركة الإنسان، وضبط نموذج الانتشار بدقة.
في مؤتمر GTC 2026 الذي اختتم مؤخراً، بالإضافة إلى وحدات معالجة الرسومات الجديدة التي طال انتظارها، ركزت NVIDIA أيضاً قدراً كبيراً من الاهتمام على اتجاه أكثر واقعية وعملية:الذكاء الاصطناعي الفيزيائي.
يكشف هذا المفهوم، الذي ذكره جنسن هوانغ مرارًا، عن استنتاجٍ جوهري: لا يصبح الذكاء الاصطناعي بنيةً تحتيةً حقيقيةً تقود التحول الصناعي إلا عندما يتجاوز وجوده على الشاشة ليصبح قادرًا على إدراك البيئة المادية، وفهم المهام، وتنفيذ الإجراءات. ويتداخل هذا المفهوم بشكلٍ كبير مع مفهوم "الذكاء الاصطناعي المُجسّد"، الذي يُؤكد على الترابط الوثيق بين الذكاء الاصطناعي والعالم الحقيقي - ليس فقط "الحركة"، بل العمل بكفاءةٍ عاليةٍ في بيئاتٍ معقدة.
لذلك، يمكننا أن نرى في مؤتمر GTC 2026، وهو مؤتمر تقني رائد، أنه تمت مناقشة كل شيء بدءًا من نماذج الروبوتات البشرية الأساسية وحتى توليد الحركة عالية الدقة ونظام نمذجة جسم الإنسان الموحد.لم تعد سلسلة النماذج التي أصدرتها شركة NVIDIA تركز فقط على قدرات النموذج نفسها، بل تدور حول "العمل" و"التنفيذ".
في،المشاريع الثلاثة مفتوحة المصدر هي NVIDIA Isaac GR00T وKimodo وSOMA-X.إنهم يتناولون نفس المشكلة من ثلاثة مستويات: اتخاذ القرار، والتوليد، والتمثيل - كيفية تمكين الآلات من أداء الإجراءات المعقدة بشكل طبيعي وفعال.
يتولى أحدها مسؤولية فهم المهام وترجمتها إلى سلوكيات قابلة للتنفيذ؛ ويركز آخر على توليد مسارات حركة مفصلة وواقعية؛ أما الثالث فيسعى إلى حل مشكلة النماذج البشرية المجزأة، وهي مشكلة مزمنة، مما يتيح تعاونًا أكثر سلاسة بين الأنظمة المختلفة. لكل من هذه القدرات قيمتها الواضحة، ولكن الأهم من ذلك، أنها جميعًا تشير إلى هدف عملي أكثر: وهو جعل الروبوتات تنتقل من كونها "نشطة" إلى كونها "سهلة الاستخدام".
بجانب،أصدرت NVIDIA أيضًا FDFO، وهي طريقة تدريب لنماذج الانتشار، والتي توفر دعمًا أساسيًا للقدرات المذكورة أعلاه من منظور تحسين النموذج التوليدي.
لتمكين المطورين العالميين من تجربة إنجازات المصادر المفتوحة لمؤتمر GTC 2026 بسرعة في بيئة أكثر سهولة واستقرارًا، أطلق موقع HyperAI الإلكتروني (hyper.ai) الدروس التعليمية التالية عبر الإنترنت في قسم الدروس التعليمية الخاص به:
إنفيديا إسحاق GR00T: نموذج أساسي للروبوتات البشرية متعددة الأغراض
تشغيل عبر الإنترنت:https://go.hyper.ai/2Cjvr
SOMA-X: إطار عمل معياري موحد لنماذج جسم الإنسان
تشغيل عبر الإنترنت:https://go.hyper.ai/UcEI7
كيمودو: نماذج توليد الحركة البشرية والروبوتية
تشغيل عبر الإنترنت:https://go.hyper.ai/p99vI
FDFO: تحسين التدفق التفاضلي المحدود
تشغيل عبر الإنترنت:https://go.hyper.ai/ikihN
تقدم HyperAI فوائد التسجيل للمستخدمين الجدد.مقابل $1 فقط، يمكنك الحصول على 20 ساعة من قوة الحوسبة RTX 5090 (السعر الأصلي $7).المورد صالح بشكل دائم.
إنفيديا إسحاق غروت
نموذج أساسي عام للروبوت البشري
يُعدّ NVIDIA Isaac GR00T N1.6 نموذجًا مفتوح المصدر للرؤية واللغة والحركة (VLA)، وقد أُطلق في مارس 2026، وهو مصمم خصيصًا لتعليم المهارات في الروبوتات البشرية العامة. يستخدم هذا النموذج تصميمًا متعدد الوسائط، مما يُمكّنه من استقبال مدخلات متعددة الوسائط، بما في ذلك اللغة والصور، وأداء مهام التلاعب في بيئات متنوعة.
تجمع بنية الشبكة العصبية في GR00T N1.6 بين نموذج أساسي للغة المرئية ورأس محول الانتشار لإزالة التشويش الناتج عن الحركة المستمرة. يتم تدريب هذا النموذج على بيانات روبوتية متنوعة، تشمل الروبوتات ثنائية الذراع، والروبوتات شبه البشرية، والروبوتات البشرية واسعة النطاق، ويمكن إعادة تدريبه لاحقًا للتكيف مع مختلف أشكال الروبوتات ومهامها وبيئاتها.
تشغيل عبر الإنترنت:https://go.hyper.ai/2Cjvr

SOMA-X: إطار عمل معياري موحد لنماذج جسم الإنسان
تُستخدم نماذج الجسم البشري البارامترية، بما في ذلك Skinned Multi-Person Linear (SMPL) و SMPL-X و Multi-Task Human Representation (MHR) و Anny و GarmentMeasurements، على نطاق واسع في مجالات مثل إعادة بناء الجسم البشري والرسوم المتحركة والمحاكاة.
مع ذلك، تعاني هذه النماذج من عدم توافق جوهري على المستوى الأساسي: إذ يُحدد كل نموذج بنية شبكته الخاصة، وتسلسل مفاصله، وطريقة تحديد معاييره، مما يجعل التكامل السلس مستحيلاً. لذا، عند الحاجة إلى دمج مزايا نماذج مختلفة (مثل دمج إمكانيات التحكم في العمر لنموذج مع بيانات الحركة من نموذج آخر)، غالباً ما يكون من الضروري تطوير مُهايئ منفصل لكل زوج من النماذج. وهذا لا يزيد تكاليف التطوير فحسب، بل يُقيد بشدة قابلية التشغيل البيني للنظام وتطبيقاته العملية.
في هذا السياق، أطلقت مختبرات NVIDIA نظام SOMA-X لمعالجة مشكلات التوافق بين نماذج الإنسان البارامترية. يوفر هذا النظام بنيةً موحدةً لهيكل الإنسان ونظامًا مركزيًا مشتركًا لجميع نماذج الإنسان البارامترية المدعومة. وبدلًا من استبدال النماذج الحالية، يحقق النظام التوحيد من خلال ربط الأشكال الثابتة لكل نموذج بتمثيل مشترك. يتيح هذا النهج تشغيل أي نموذج هوية مدعوم ضمن مسار رسوم متحركة موحد دون الحاجة إلى محولات مخصصة أو إعادة توجيه خاصة بالنموذج، مما يُحسّن بشكل كبير من مرونة النظام وقابليته للتوسع.
تشغيل عبر الإنترنت:https://go.hyper.ai/UcEI7
كيمودو: نماذج توليد الحركة البشرية والروبوتية
Kimodo هو نموذج انتشار الحركة الحركية الذي أصدرته NVIDIA Research في مارس 2026. تم تدريب هذا النموذج على مجموعة بيانات التقاط الحركة البصرية واسعة النطاق (700 ساعة) والمتاحة تجاريًا، وهو يُولّد حركة عالية الجودة للإنسان والروبوت الشبيه بالإنسان، ويمكن التحكم فيه عبر مطالبات نصية وقيود حركية غنية مثل الإطارات الرئيسية لوضعية الجسم بالكامل، وموضع/دوران المؤثر النهائي، والمسارات ثنائية الأبعاد، ونقاط الطريق ثنائية الأبعاد.
يدعم برنامج Kimodo أنواعًا متعددة من العظام، بما في ذلك:
* سوما: الهيكل العظمي البشري، 30 مفصلاً
* يونيتري جي 1: هيكل روبوت بشري الشكل بـ 34 مفصلاً
* SMPL-X: نموذج جسم بشري بارامتري يحتوي على 22 مفصلاً.
يستخدم هذا النموذج بنية انتشار، تجمع بين مشفر نصي وآلية تقييد الحركة، مما يُمكّنه من توليد تسلسلات حركة سلسة وطبيعية بناءً على أوصاف اللغة الطبيعية وقيود الإطارات الرئيسية.
تشغيل عبر الإنترنت:https://go.hyper.ai/p99vI
FDFO: تحسين التدفق التفاضلي المحدود
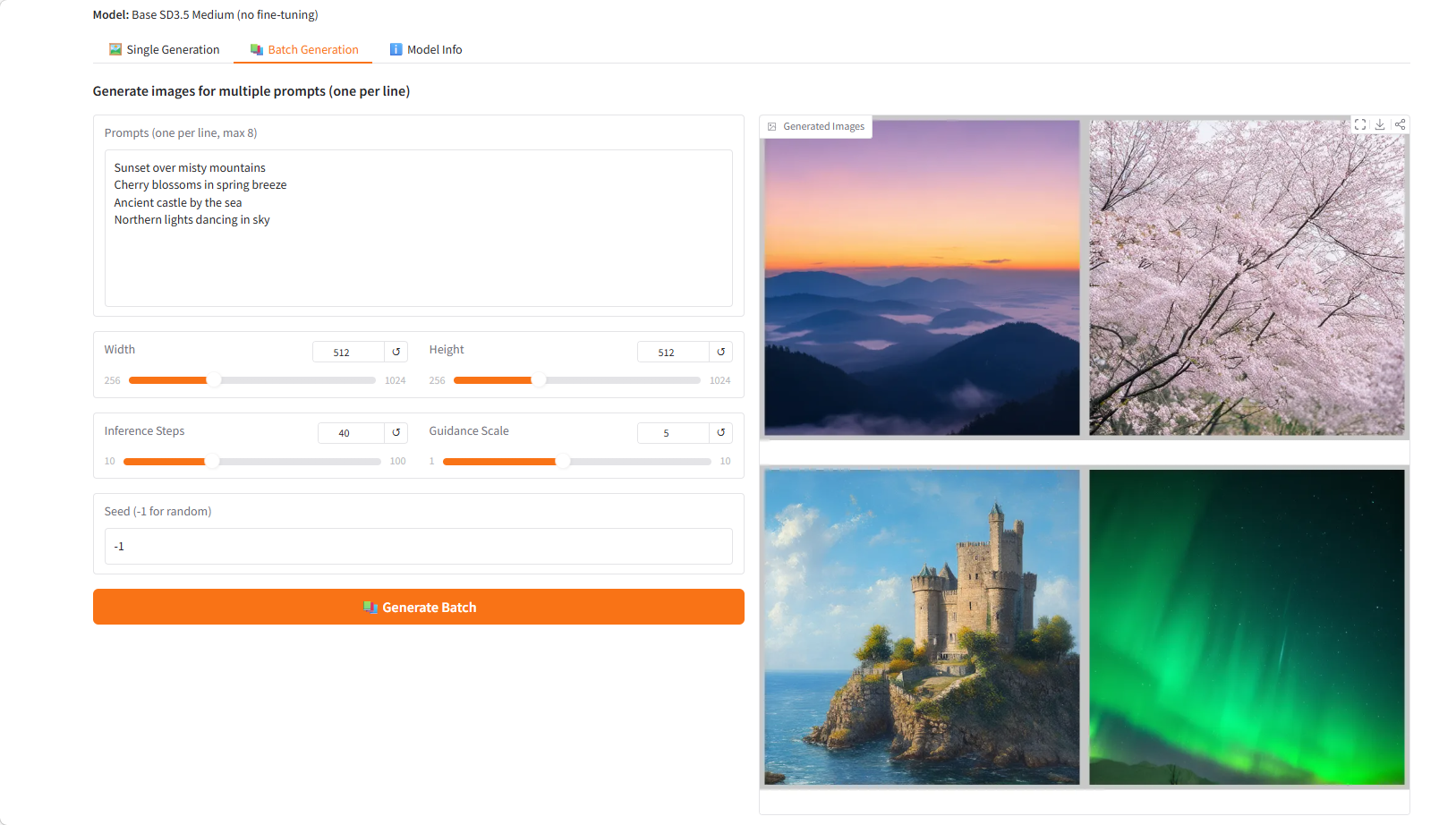
FDFO (تحسين تدفق الفروق المحدودة) هي طريقة لضبط نماذج الانتشار المتدفق، أطلقتها NVIDIA في مارس 2026، وتعتمد على تقدير تدرج الفروق المحدودة. تعمل هذه الطريقة على تحسين جودة توليد النموذج من خلال تدريبه على مجموعة بيانات Stable Diffusion 3.5 Medium باستخدام إشارات المكافأة من درجات نموذج اللغة المرئية (VLM) و/أو PickScores بعد التعلم المعزز.
تحلّ خوارزمية FDFO مشكلة تقدير التدرج في عملية الضبط الدقيق لنماذج الانتشار التقليدية، وذلك من خلال تحقيق حساب تدرج فعال ومستقر باستخدام طريقة الفروق المحدودة. مع الحفاظ على القدرات الأصلية للنموذج، تُحسّن هذه الطريقة بشكل ملحوظ التوافق والجودة الجمالية والواقعية بين الصورة المُولّدة والنص المطلوب.
تشغيل عبر الإنترنت:https://go.hyper.ai/ikihN