HyperAI
Command Palette
Search for a command to run...
Papers
最新のAIトレンドを把握するための、日々更新される最先端AI研究論文
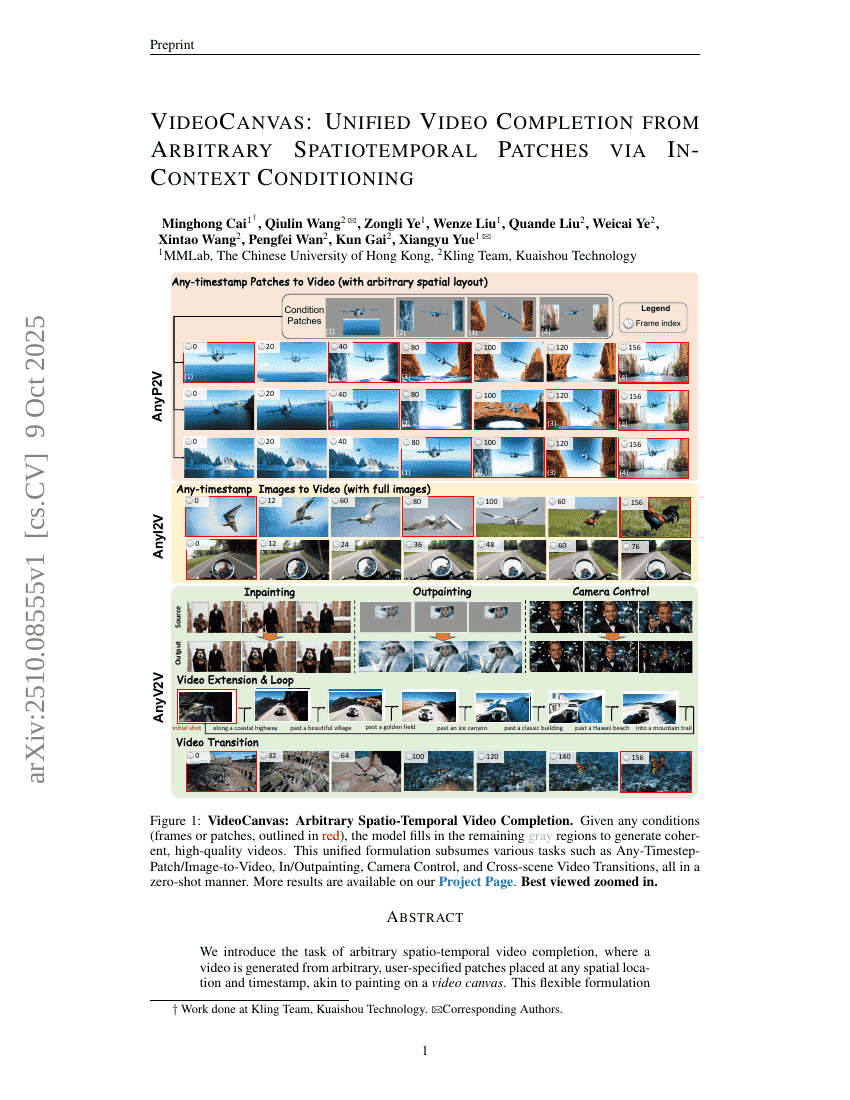
VideoCanvas:文脈条件付きによる任意の時空間パッチからの統一的動画補完
UniVideo:動画の統合的理解・生成・編集








VideoCanvas:文脈条件付きによる任意の時空間パッチからの統一的動画補完
UniVideo:動画の統合的理解・生成・編集
MemMamba:状態空間モデルにおけるメモリパターンの再考
PromptCoT 2.0:大規模言語モデル推論のためのプロンプト生成のスケーリング
抽出-0:ドキュメント情報抽出のための専門化された言語モデル
オムニリターゲット:ヒューマノイド全身運動と操作およびシーンインタラクションのためのインタラクション保持型データ生成
WildSpeech-Bench:野生環境におけるエンドツーエンド音声LLMのベンチマーク
大規模言語モデルの整合性向上のためのトークン認識型内部活性の編集
学びを追求する:リソースが限られた視覚言語モデリングのためのトークン別ダイナミックゲーティング
エージェントの早期経験を用いた学習
MATRIX:インタラクション認識型動画生成のためのマスクトラックアライメント
RLinf-VLA:VLA+RL学習を統合的かつ効率的に実現するフレームワーク
SHANKS:音声言語モデルにおける同時聴取と思考
Lumina-DiMOO:マルチモーダル生成および理解を目的としたオムニ拡散大規模言語モデル
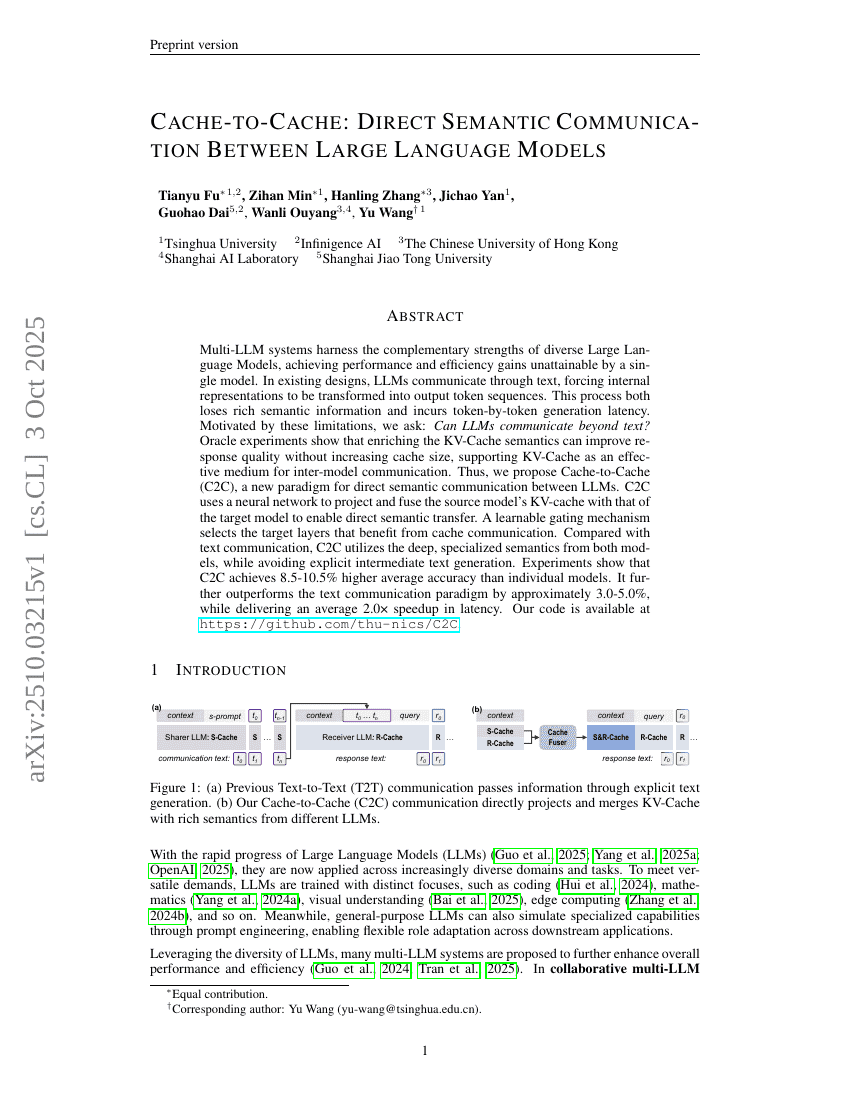
キャッシュ間通信:大規模言語モデル間の直接的な意味通信
Ming-UniVision:統一連続トークナイザーを用いた画像理解と生成の統合
Phi-3 技術レポート:あなたのスマートフォン上でローカルに実行可能な高機能な言語モデル
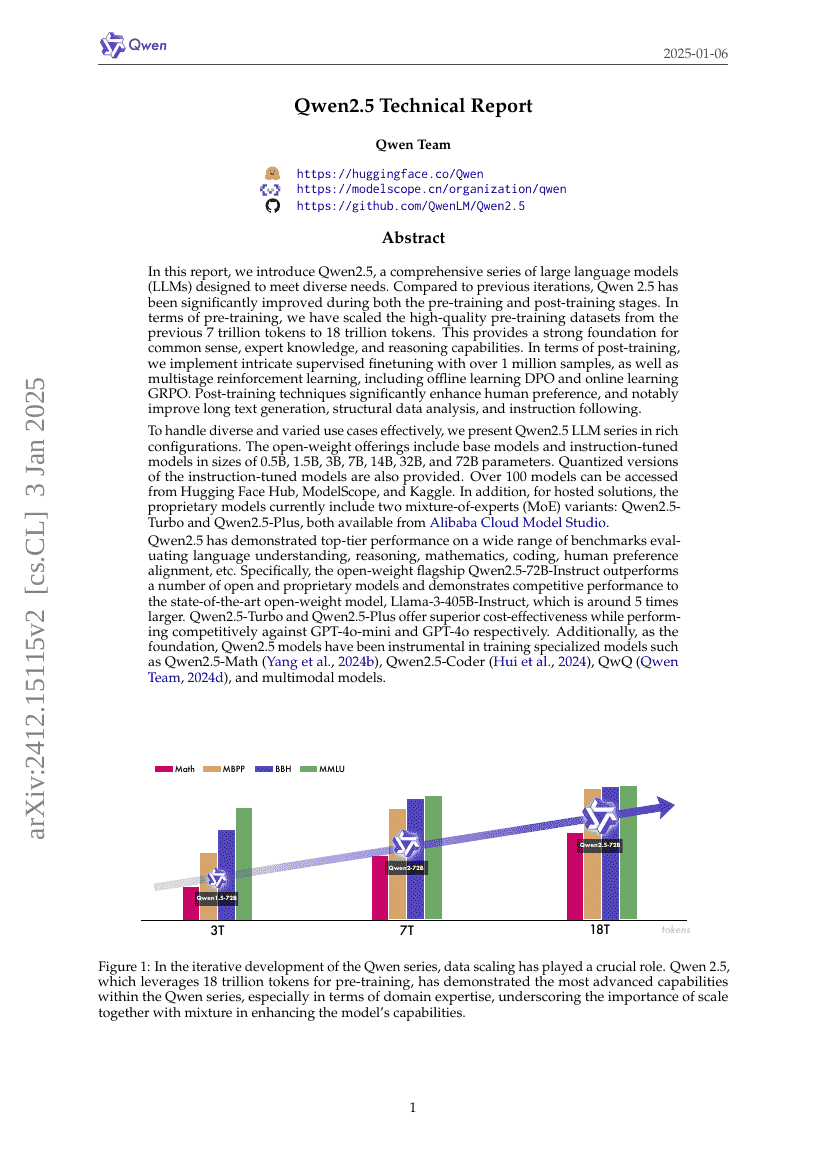
Qwen2.5 技術報告
ディープリサーチを組み込んだAlphaEvolveによる科学的アルゴリズムの発見
ConstraintLLM:産業レベルの制約プログラミングのためのニューロ・シンボリック枠組み
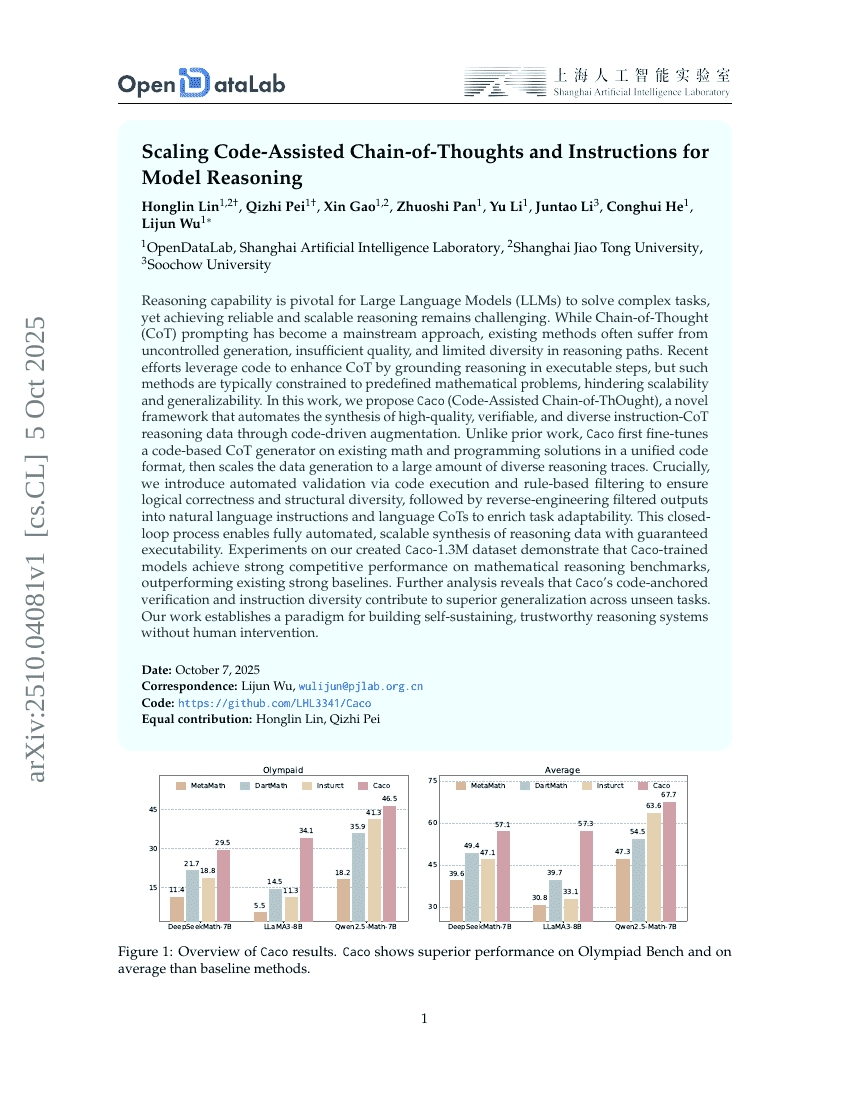
コード支援付きチェーン・オブ・シンキングおよび指示のスケーリングによるモデル推論
CoDA:拡散適応を用いたLMのコーディング
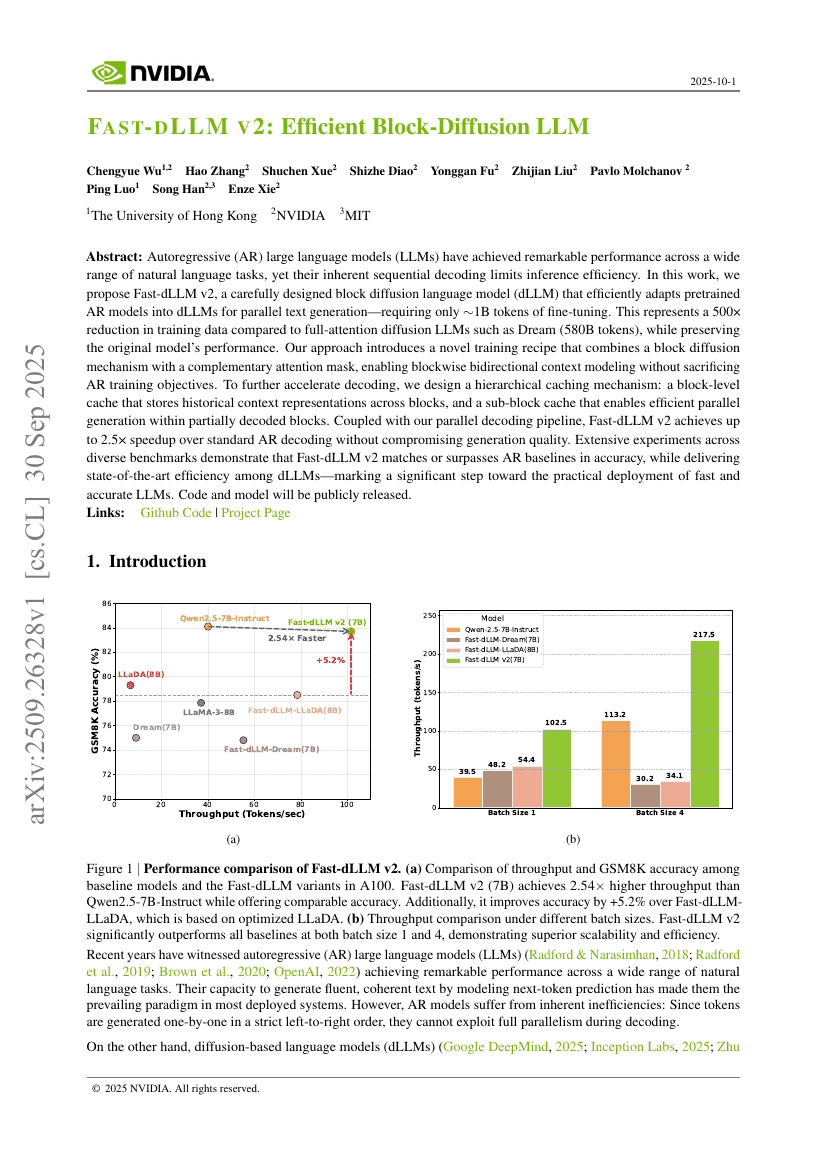
Fast-dLLM v2:効率的なブロックディフュージョン型LLM
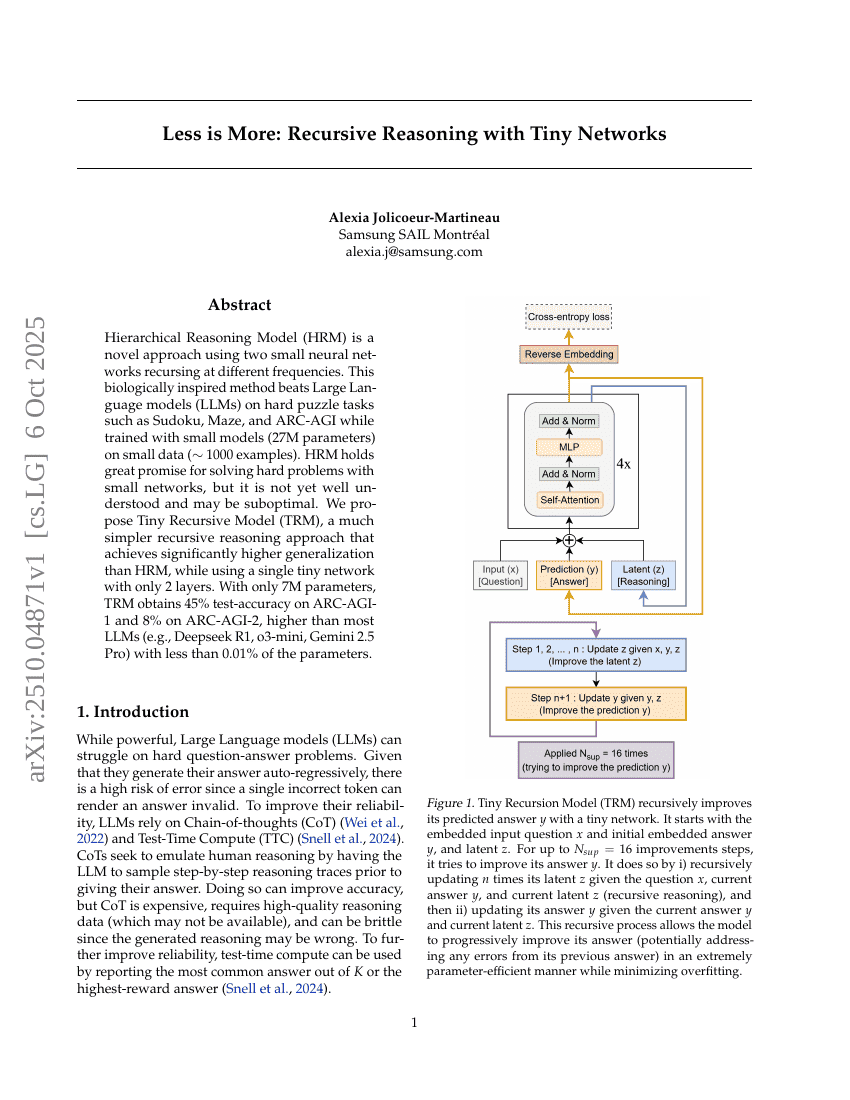
少ないことがむしろ多い:小さなネットワークを用いた再帰的推論
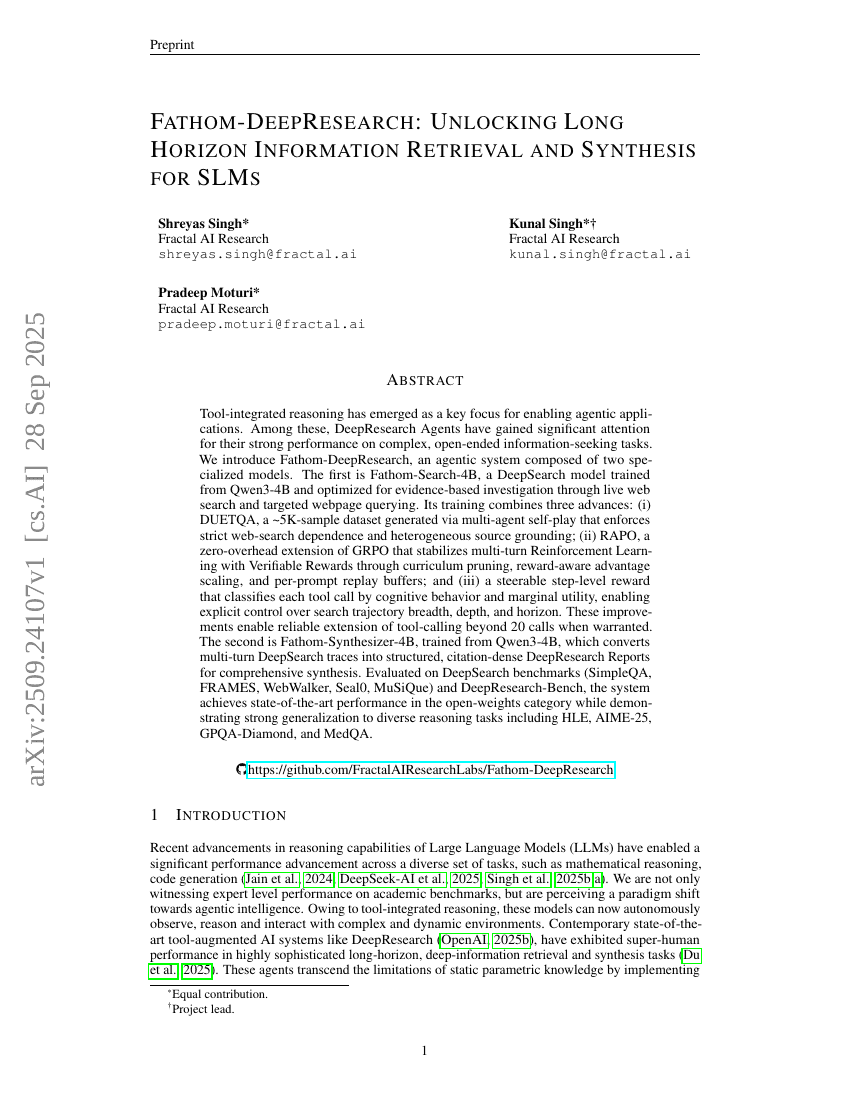
Fathom-DeepResearch:SLM向けの長期視野情報検索および統合の可能性を解き放つ
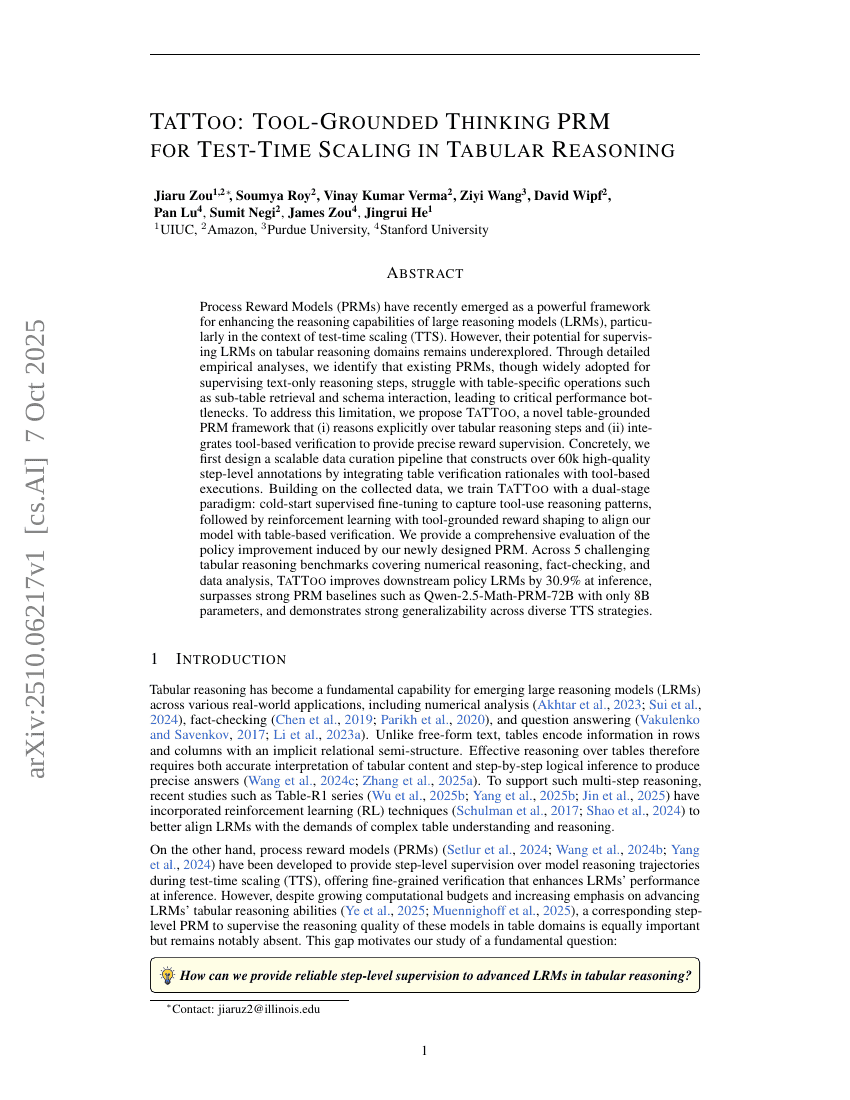
TaTToo:テーブル推論におけるテスト時スケーリングのためのツール接地型思考PRM
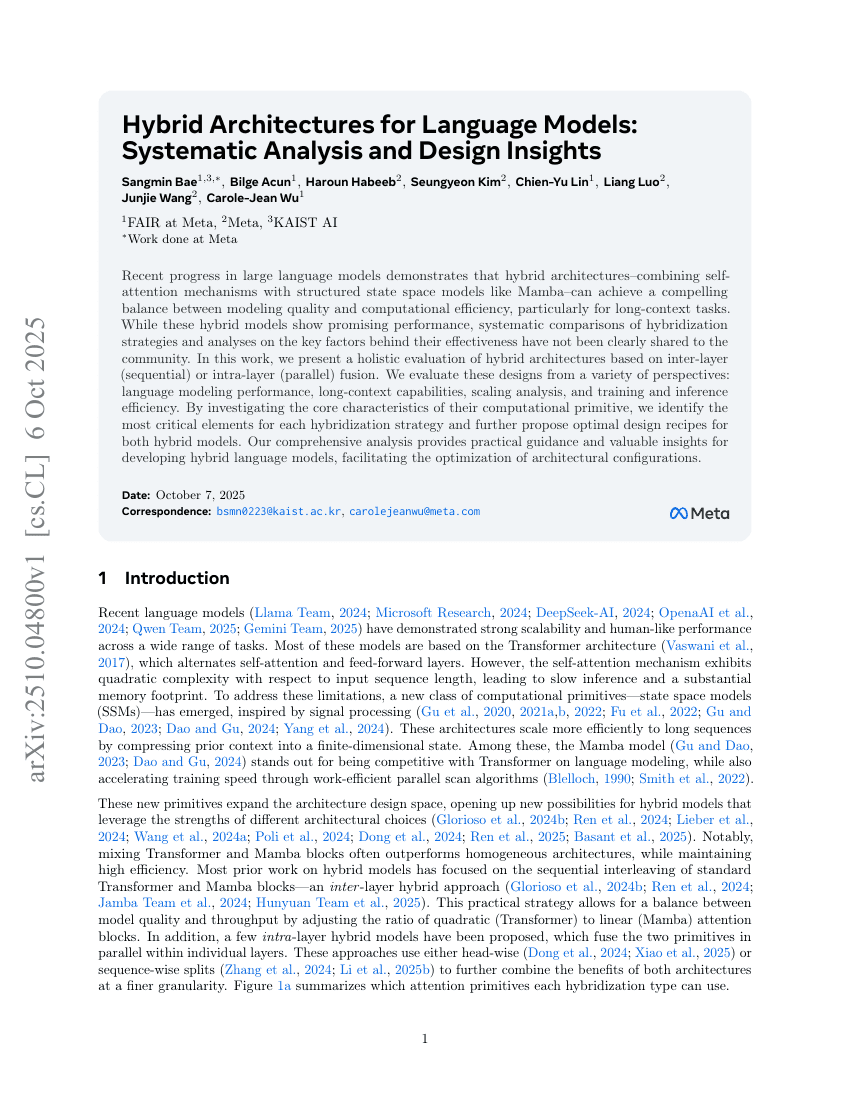
言語モデル向けハイブリッドアーキテクチャ:体系的分析と設計の知見
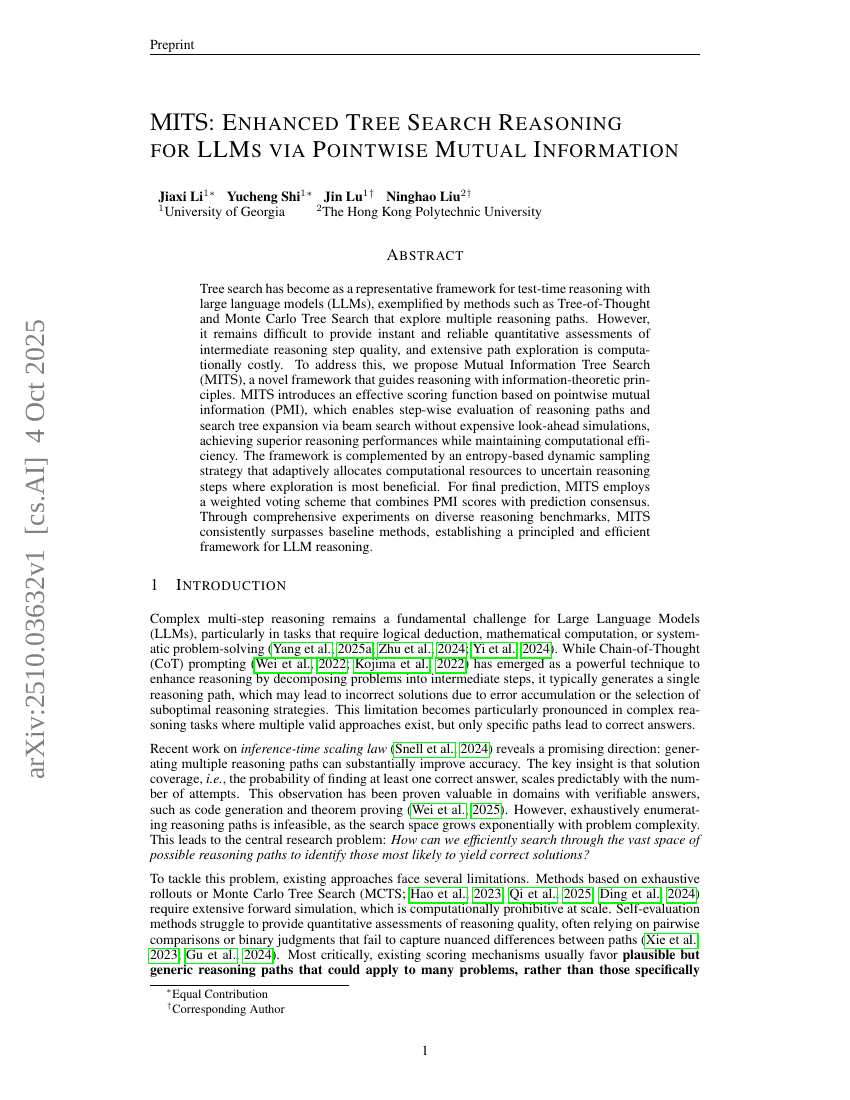
MITS:ポイントワイズ相互情報量を用いたツリー探索推論によるLLMの性能向上
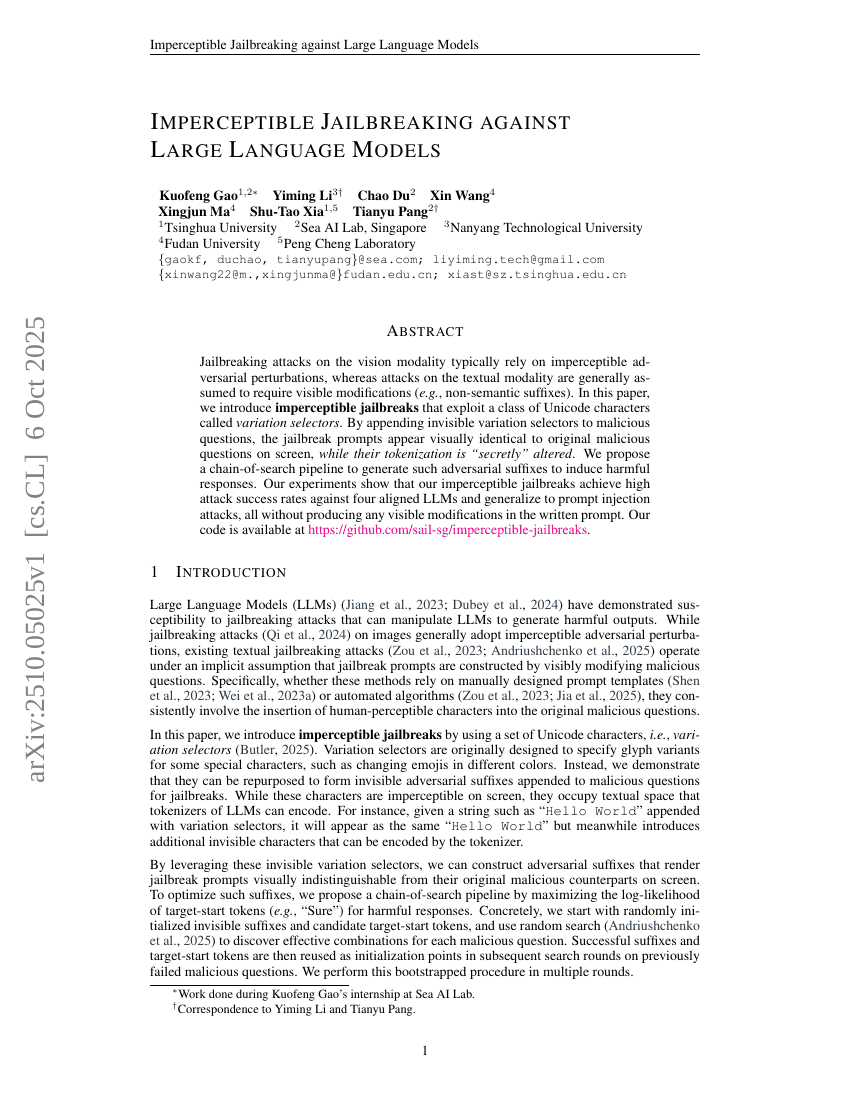
大規模言語モデルに対する認識不能な改ざん
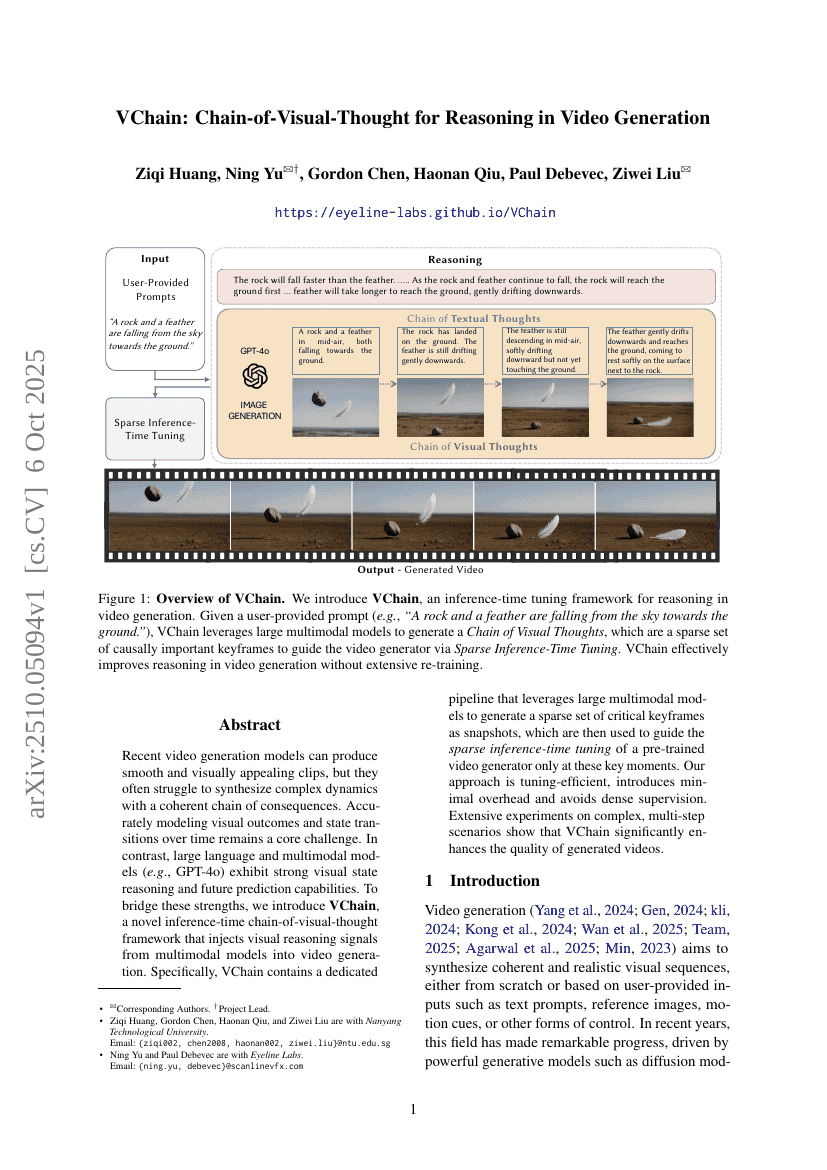
VChain:動画生成における推論のための視覚的思考の連鎖
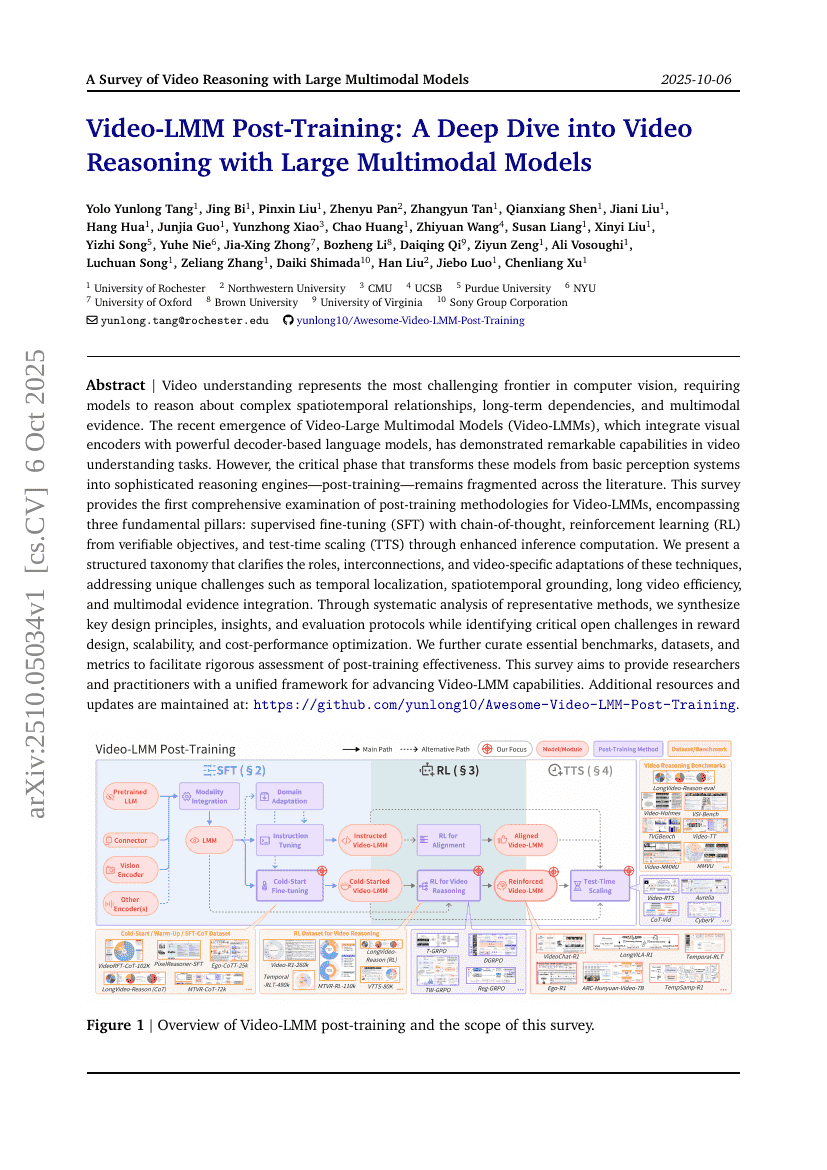
ビデオ-LMM ポストトレーニング:大規模マルチモーダルモデルを用いたビデオ推論の深層分析
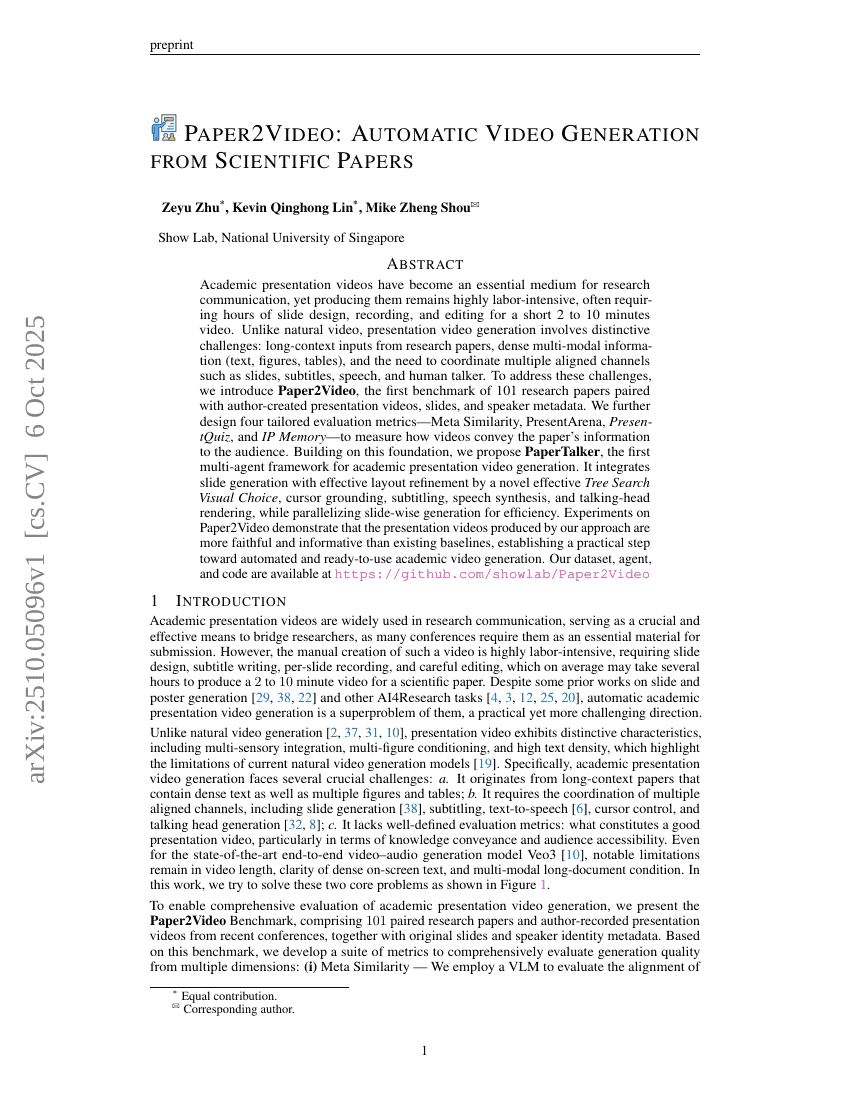
Paper2Video:科学論文からの自動動画生成
MemMamba:状態空間モデルにおけるメモリパターンの再考
PromptCoT 2.0:大規模言語モデル推論のためのプロンプト生成のスケーリング
抽出-0:ドキュメント情報抽出のための専門化された言語モデル
オムニリターゲット:ヒューマノイド全身運動と操作およびシーンインタラクションのためのインタラクション保持型データ生成
WildSpeech-Bench:野生環境におけるエンドツーエンド音声LLMのベンチマーク
大規模言語モデルの整合性向上のためのトークン認識型内部活性の編集
学びを追求する:リソースが限られた視覚言語モデリングのためのトークン別ダイナミックゲーティング
エージェントの早期経験を用いた学習
MATRIX:インタラクション認識型動画生成のためのマスクトラックアライメント
RLinf-VLA:VLA+RL学習を統合的かつ効率的に実現するフレームワーク
SHANKS:音声言語モデルにおける同時聴取と思考
Lumina-DiMOO:マルチモーダル生成および理解を目的としたオムニ拡散大規模言語モデル
キャッシュ間通信:大規模言語モデル間の直接的な意味通信
Ming-UniVision:統一連続トークナイザーを用いた画像理解と生成の統合
Phi-3 技術レポート:あなたのスマートフォン上でローカルに実行可能な高機能な言語モデル
Qwen2.5 技術報告
ディープリサーチを組み込んだAlphaEvolveによる科学的アルゴリズムの発見
ConstraintLLM:産業レベルの制約プログラミングのためのニューロ・シンボリック枠組み
コード支援付きチェーン・オブ・シンキングおよび指示のスケーリングによるモデル推論
CoDA:拡散適応を用いたLMのコーディング
Fast-dLLM v2:効率的なブロックディフュージョン型LLM
少ないことがむしろ多い:小さなネットワークを用いた再帰的推論
Fathom-DeepResearch:SLM向けの長期視野情報検索および統合の可能性を解き放つ
TaTToo:テーブル推論におけるテスト時スケーリングのためのツール接地型思考PRM
言語モデル向けハイブリッドアーキテクチャ:体系的分析と設計の知見
MITS:ポイントワイズ相互情報量を用いたツリー探索推論によるLLMの性能向上
大規模言語モデルに対する認識不能な改ざん
VChain:動画生成における推論のための視覚的思考の連鎖
ビデオ-LMM ポストトレーニング:大規模マルチモーダルモデルを用いたビデオ推論の深層分析
Paper2Video:科学論文からの自動動画生成