Command Palette
Search for a command to run...
二足歩行ロボットは 1 キロあたり 9 分 18 秒のペースで 5 キロのジョギングを完了します
内容の説明: オレゴン州立大学の Cassie は、5 キロメートルのジョギングを 53 分で完了し、二足歩行ロボットの新記録を樹立しました。
最近、オレゴン州立大学の著名なロボット研究チーム、アジリティ・ロボティクスが開発した二足歩行ロボット「キャシー」が5キロのジョギングを53分で完走し、注目を集めた。
人間の速度に近く、5キロメートルなら充電不要です。
研究チーム「Agility Robotics」は、この5キロメートルの走行の過程とハイライトを記録したビデオを公開した。

ビデオの中のキャシーは、器用な関節の動きと安定したステップを備えたダチョウのように見えます。
アジリティ・ロボティクスの創始者でオレゴン州立大学教授のジョナサン・ハースト氏は次のように述べています。 キャシーは 5 キロメートルのジョギング中にチャージを行わず、調整のために停止したのは 2 回のみで、1 回はオーバーヒートのため、もう 1 回はカーブでの速度超過によるものでした。この 2 回の調整には 6 分半かかりました。
つまり、シャットダウン調整の6分半を除くと、 キャシーは 9 分 18 秒/km のペースで、5 キロのジョギングを約 46 分 30 秒で完了しました。

研究チームによると、キャシーは「機械学習を使用して屋外会場での走行歩行を制御した」初の二足歩行ロボットだという。
最近の研究に基づいて、チームは論文「Blind Bipedal Stair Traversal via Sim-to-Real Reinforcement Learning」(視覚のない二足歩行ロボットがシミュレーションから現実への強化学習を通じて階段を登る)を完成させ、今年のロボット工学にも選ばれました。 : 科学とシステム (RSS) カンファレンス。

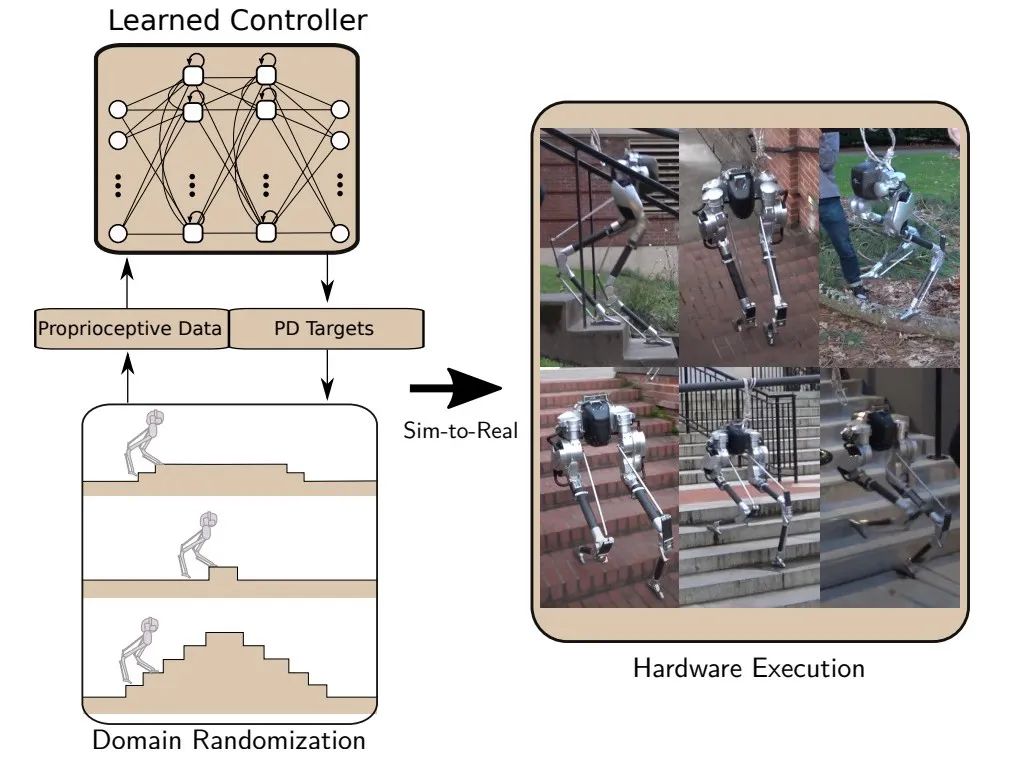
強化学習を通じて、二足歩行ロボットはさまざまな高さでの地面の変化をシミュレートし、それに適応するように訓練されます。既存の平坦な地面の強化学習フレームワークをわずかに変更するだけで、階段や平坦でない地面、その他のシナリオでも安定して歩くことができます。
ジョギングのシーンでも階段のシーンでも、Cassie は下肢の運動エネルギー伝導に完全に依存して、視覚的な入力なしでモーション計算を実行していることは言及する価値があります。
より人間に近い二足歩行ロボット
おなじみの 4 脚ロボット、インターネットの有名人であるボストン ダイナミクス ロボット ドッグは、ここ数年で、走ったりジャンプしたり、階段を上り下りしたり、さらには縄跳びやダンスをしたりするなど、使用シナリオを見つけることに成功しました。
しかし、動物の形で設計されることが多い四足ロボットと比較して、二足歩行ロボットは外観がより人間に似ており、機能も人間に近いものです。

人間の歩行は、動きを完了するために各関節を駆動するという脳からの指令に基づいています。二足歩行ロボットは、ロボットの歩行と安定性をサポートするために人間の腰と足裏をシミュレートする必要があります。ロボットの動的特性を十分に理解することによってのみ、ロボットを効率的かつ複雑な動作に導くことができます。
Cassie シリーズのロボットの力学は、鳥、特にダチョウの歩き方に基づいています。 Cassie の股関節は複数の自由な角度で設計されていますが、膝は一方向にのみ曲げることができます。足首は柔軟で丈夫になるように設計されており、ボディ全体が非常に軽く、人間の歩行と同様に、より自然な方法で振動を軽減できます。 。
オレゴン大学ダイナミック ロボティクス研究所のアジリティ ロボティクス チームは、ロボット業界で長年の評判を誇っています。彼らは 2017 年に二足歩行ロボット Cassie シリーズの開発を開始し、これまでに複数のバージョンを経て、これまでに多くの成果を上げてきました。最近では DARPA から 100 万米ドルの研究資金を受け取りました。
チームは、この5キロメートルの無充電ジョギングの成功は大きな自信になったと述べ、物流や流通などの応用シナリオに参入するために、今後もCassieのテクノロジーの変革と強化を続けていくとしている。
ソース:
– オレゴン州立大学公式サイト「オレゴン州立大学で開発された二足歩行ロボットが、走り方を学習し、5Kを達成することで歴史を作る」
– YouTube ビデオ「OSU 二足歩行ロボットが初めて 5K を実行」
– 論文参考文献