Command Palette
Search for a command to run...
Une Avancée Majeure Dans l'apprentissage Automatique Appliqué À La Physique ! Une Nouvelle Architecture De Réseau De Neurones Graphiques (GNN) Permet Des Prédictions Précises Des Systèmes Dynamiques Multicorps Complexes, Ouvrant La Voie À La Robotique, À l'aérospatiale Et À La Science Des matériaux.

Ces dernières années, l'intelligence artificielle a réalisé des progrès considérables dans des domaines tels que la reconnaissance d'images et le traitement automatique du langage naturel, mais elle se heurte encore à de nombreux défis en matière de modélisation des systèmes physiques complexes. De nombreux problèmes concrets, comme le mouvement des particules, la dynamique moléculaire, le mouvement humain et la simulation des systèmes mécaniques, relèvent de la catégorie des systèmes dynamiques multicorps. Ces systèmes présentent généralement des interactions très complexes et doivent obéir strictement aux lois physiques fondamentales, telles que la conservation de la quantité de mouvement et de l'énergie.
Les méthodes de simulation numérique traditionnelles peuvent décrire ces systèmes avec précision, mais elles sont souvent coûteuses en ressources de calcul, notamment lorsqu'il s'agit de simulations à long terme ou de systèmes de particules à grande échelle, où les ressources de calcul sont consommées en grandes quantités.Dans le même temps, bien que les modèles d'apprentissage automatique puissent apprendre des relations complexes à partir des données, ils manquent souvent de contraintes sur les lois physiques, ce qui conduit à une accumulation d'erreurs, voire à une divergence du système dans les prédictions à long terme.
Dans ce contexte, l'apprentissage automatique appliqué à l'information physique est progressivement devenu un sujet de recherche très en vogue.Les méthodes de modélisation dynamique basées sur les réseaux neuronaux graphiques (GNN) ont suscité un vif intérêt ces dernières années. Les réseaux de neurones génératifs (GNN) peuvent représenter naturellement les interactions entre particules ou corps rigides : les nœuds représentent les objets et les arêtes, les interactions. Ils sont donc bien adaptés à la simulation de systèmes multicorps. Cependant, les méthodes basées sur les données, telles que les GNN, manquent souvent de cohérence physique, d’interprétabilité et de capacité de généralisation.
Pour résoudre ce problème,Des chercheurs de l'École polytechnique fédérale de Lausanne (EPFL) ont proposé une nouvelle architecture de réseau de neurones graphiques (GNN) basée sur la physique, DYNAMI-CAL GraphNet, qui combine les capacités d'apprentissage des GNN avec des biais inductifs fondés sur la physique. En intégrant directement les lois de conservation de la quantité de mouvement linéaire et angulaire dans la structure du modèle, ces deux conservations sont explicitement garanties.
Les résultats expérimentaux démontrent que DYNAMI-CAL GRAPHNET offre des avantages significatifs dans les domaines exigeant une modélisation précise, interprétable et en temps réel de systèmes dynamiques multicorps complexes, tels que la robotique, l'ingénierie aérospatiale et la science des matériaux. Grâce à ses capacités de prédiction physiquement cohérentes et évolutives, conformes aux lois fondamentales de conservation, cette méthode permet d'inférer les forces et les couples au sein des systèmes, tout en gérant efficacement les interactions hétérogènes et les forces externes.
Les résultats de cette recherche, intitulée « Un réseau neuronal graphique informé par la physique conservant le moment linéaire et angulaire pour les systèmes dynamiques », ont été publiés dans Nature Communications.
Points saillants de la recherche :
* Dans l'architecture GNN isovariante, DYNAMI-CAL GRAPHNET intègre directement la conservation de la quantité de mouvement linéaire et angulaire dans la structure du réseau en appliquant la troisième loi de Newton au niveau des interactions par paires internes.
Cette méthode fournit des prédictions physiquement cohérentes même dans le cas d'interactions non centrales complexes et d'effets dissipatifs, et elle est applicable à une variété de systèmes.
Cette architecture présente un intérêt considérable pour la conception de systèmes de contrôle, l'optimisation des processus mécaniques et l'analyse du comportement dynamique des systèmes naturels et techniques.
Adresse du document :
https://www.nature.com/articles/s41467-025-67802-5
Suivez notre compte WeChat officiel et répondez « Physics GNN » en arrière-plan pour obtenir le PDF complet.
Quatre types distincts d'ensembles de données de systèmes dynamiques
Pour vérifier la généralité du modèle, l'équipe de recherche a mené des expériences sur quatre ensembles de données distincts de systèmes dynamiques.Ces ensembles de données couvrent une variété de scénarios, allant des simulations physiques aux données réelles. Parmi eux :
Ensemble de données de collision de particules à 6 degrés de liberté
L'équipe de recherche a construit un système de collision de particules à six degrés de liberté. Dans ce système, chaque particule peut non seulement se déplacer, mais aussi tourner, possédant ainsi six degrés de liberté (6-DoF).
L'ensemble de données d'entraînement se compose de 5 trajectoires, chacune contenant 60 sphères identiques.Ces sphères sont confinées dans un espace rectangulaire clos. Leurs vitesses linéaires initiales sont attribuées aléatoirement et échantillonnées uniformément entre 1 et 2 m/s. Chaque trajectoire comprend 1500 pas de temps, avec un intervalle d'échantillonnage de 10⁻⁴ secondes, tandis que le pas de temps de la simulation physique sous-jacente est de 10⁻⁶ secondes. À chaque pas de temps, les informations d'état suivantes sont enregistrées pour chaque sphère : position, vitesse linéaire et vitesse angulaire.
L'ensemble de validation contient une trajectoire qui n'a pas été utilisée lors de l'entraînement. Le système comprend également 60 sphères et 200 pas de temps.Sa vitesse initiale reste dans la plage d'entraînement, mais sa direction diffère des données d'entraînement, ce qui permet de tester la capacité de généralisation du modèle.
L'ensemble de test d'interpolation est configuré de la même manière que l'ensemble de validation, mais la longueur de la trajectoire est de 500 pas de temps.Utilisé pour évaluer la capacité prédictive à long terme du modèle dans la plage de distribution d'entraînement.
Système à N corps contraint
Pour les problèmes classiques de dynamique à N corps contraints, afin d'évaluer l'applicabilité du modèle dans les systèmes à interactions mixtes et les systèmes structurellement contraints,Les chercheurs ont utilisé l'ensemble de données N-corps contraint proposé dans la littérature.Cet ensemble de données étend la simulation de particules chargées tridimensionnelles proposée par Thomas Kipf et al. en introduisant des contraintes complètes sous la forme de bâtonnets rigides et de charnières pour construire le système.
données de capture de mouvement humain
Le troisième ensemble de données provient de données de mouvement humain réelles issues de la base de données de capture de mouvement de CMU.Cet ensemble de données enregistre les changements de position tridimensionnels des articulations du squelette humain lors de mouvements tels que la marche, la course et le saut. Dans le cadre de l'expérience, les chercheurs ont sélectionné les données de marche d'un sujet et modélisé les articulations du squelette humain sous forme de graphe, où les nœuds représentent les articulations et les arêtes les connexions osseuses. Cette expérience visait principalement à valider les performances du modèle dans des systèmes de mouvement complexes réels.
Dynamique moléculaire des protéines
Le dernier ensemble de données provient de simulations de dynamique moléculaire des protéines.Les chercheurs ont utilisé l'ensemble de données de trajectoire d'équilibre de l'apo-adénosine kinase (AdK), acquis via la boîte à outils MDAnalysis, qui enregistre le mouvement au niveau atomique des protéines dans un environnement de molécules d'eau et d'ions explicites.
DYNAMI-CAL GraphNet : une nouvelle architecture GNN basée sur l’information physique
L'idée centrale de DYNAMI-CAL GraphNet est d'intégrer directement les lois de conservation physiques dans la structure du réseau neuronal. Son architecture globale est illustrée dans la figure ci-dessous.Elle peut être divisée en trois étapes clés :
① Représentation schématique ;
② Un schéma de scalarisation-vectorisation avec conservation de la quantité de mouvement linéaire et du moment angulaire ;
③ Transmission de messages spatio-temporels.
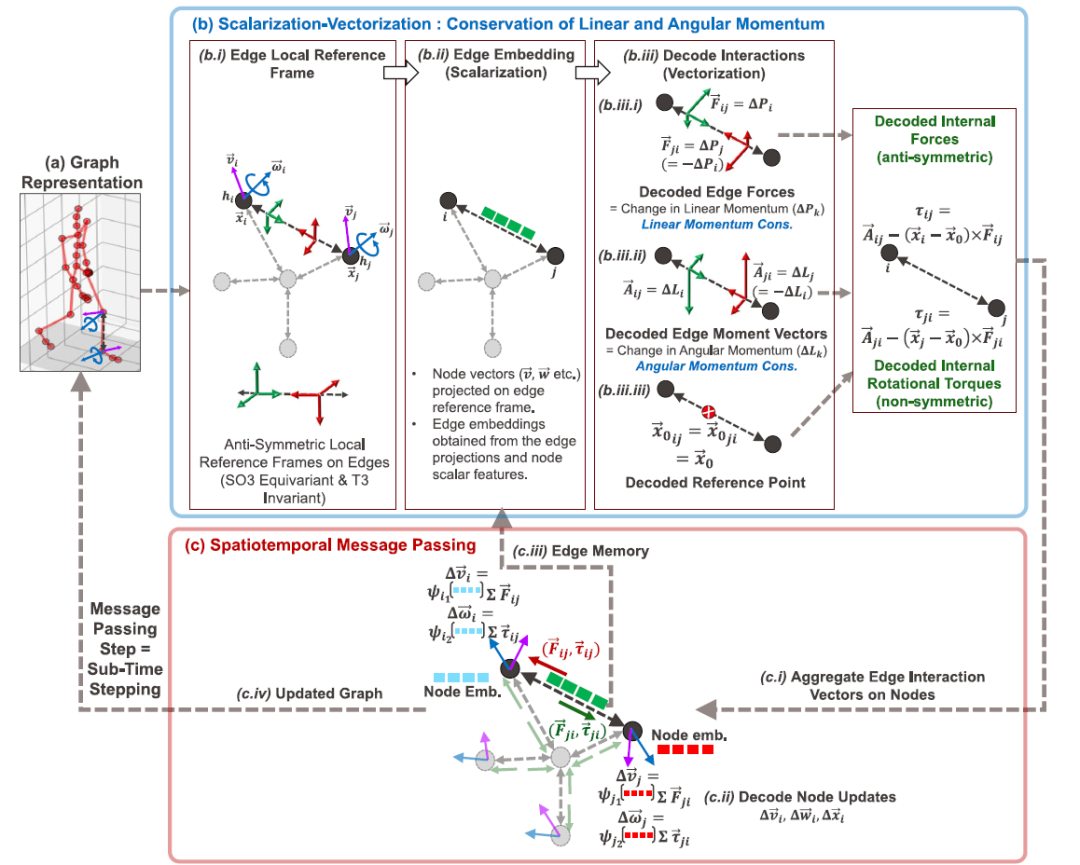
Phase 1 : Représentation graphique
Dans un premier temps, les chercheurs ont représenté le système multicorps sous forme de graphe : les nœuds représentent des objets ou des particules, et les arêtes représentent les interactions entre les objets.Chaque nœud contient de multiples caractéristiques, telles que la position, la vitesse, la vitesse angulaire et les propriétés de l'objet (masse, charge, etc.) ; tandis que les arêtes représentent les positions relatives et les relations d'interaction entre deux objets.
Deuxième étape : Scalarisation-Vectorisation
* Scalarisation
Lors de la phase de scalarisation, le modèle convertit les informations vectorielles des nœuds et des arêtes en plongements scalaires de grande dimension. Une innovation majeure réside dans l'attribution à chaque arête d'un système de coordonnées de référence orthogonal local présentant les propriétés suivantes : isovariance à la rotation 3D SO(3), invariance à la translation T(3) et antisymétrie lors de l'échange des nœuds. Concrètement, cela signifie que lorsque la direction d'une arête est inversée, les signes des trois vecteurs de base changent, garantissant ainsi que toutes les projections et tous les calculs d'interaction ultérieurs respectent l'antisymétrie.
Lors de l'étape de scalarisation, les caractéristiques vectorielles des nœuds (telles que la vitesse et la vitesse angulaire) sont projetées sur le système de coordonnées local de ces arêtes afin d'obtenir des composantes scalaires. Ces scalaires sont ensuite combinés avec d'autres caractéristiques scalaires des nœuds pour former des représentations vectorielles des arêtes, indépendantes de l'ordre des nœuds.Cette méthode encode les informations directionnelles et scalaires relatives aux interactions locales tout en préservant la symétrie du système.
* Vectorisation
Lors de la phase de vectorisation, le modèle décode les forces internes et les couples de rotation à partir des vecteurs d'intégration des arêtes. Ces forces sont ensuite agrégées sur les nœuds afin de mettre à jour la vitesse linéaire, la vitesse angulaire et la position des particules.Étant donné que la conception du modèle impose que les forces et les moments satisfassent à l'antisymétrie, le système satisfait naturellement à la conservation de la quantité de mouvement linéaire et du moment angulaire.
Phase 3 : Transmission de messages spatio-temporels
Après avoir calculé les forces et moments internes physiquement cohérents sur chaque bordLe modèle exécutera le mécanisme de passage de messages spatio-temporels de DYNAMI-CAL GRAPHNET.
Tout d'abord, les forces internes et les couples de rotation décodés au niveau des arêtes sont agrégés sur les nœuds de connexion afin d'obtenir la force et le couple résultants sur chaque nœud. Ensuite, ces vecteurs sont multipliés par des coefficients obtenus par l'intégration scalaire des nœuds pour mettre à jour leur vitesse linéaire et angulaire. Enfin, la position mise à jour est calculée à l'aide d'intégrales d'Euler implicites. Ce processus constitue la couche de communication de DYNAMI-CAL GRAPHNET.
Lors de la prochaine étape d'encodage des contours, cette représentation évolutive est préservée comme mémoire latente de chaque contour, permettant ainsi au modèle de réaliser un véritable raisonnement spatio-temporel.
Cette conception permet à DYNAMI-CAL GRAPHNET de capturer le comportement dynamique d'un système sur plusieurs échelles de temps tout en maintenant un biais inductif basé sur la physique à chaque étape de calcul.
Conclusion expérimentale : La stabilité et la capacité de généralisation sont significativement améliorées.
Des chercheurs ont évalué les performances de DYNAMI-CAL GraphNet sur quatre tâches de référence, couvrant des systèmes physiques simulés et réels. Les expériences menées sur plusieurs jeux de données démontrent que DYNAMI-CAL GraphNet surpasse les méthodes existantes sur plusieurs indicateurs.
Benchmark de collision granulaire à 6 degrés de liberté
Une expérience de prédiction de roulement a été menée sur les mouvements à 6 degrés de liberté de 60 sphères dans un conteneur cuboïde. La figure ci-dessous compare les résultats obtenus avec DYNAMI-CAL GRAPHNET et GNS :
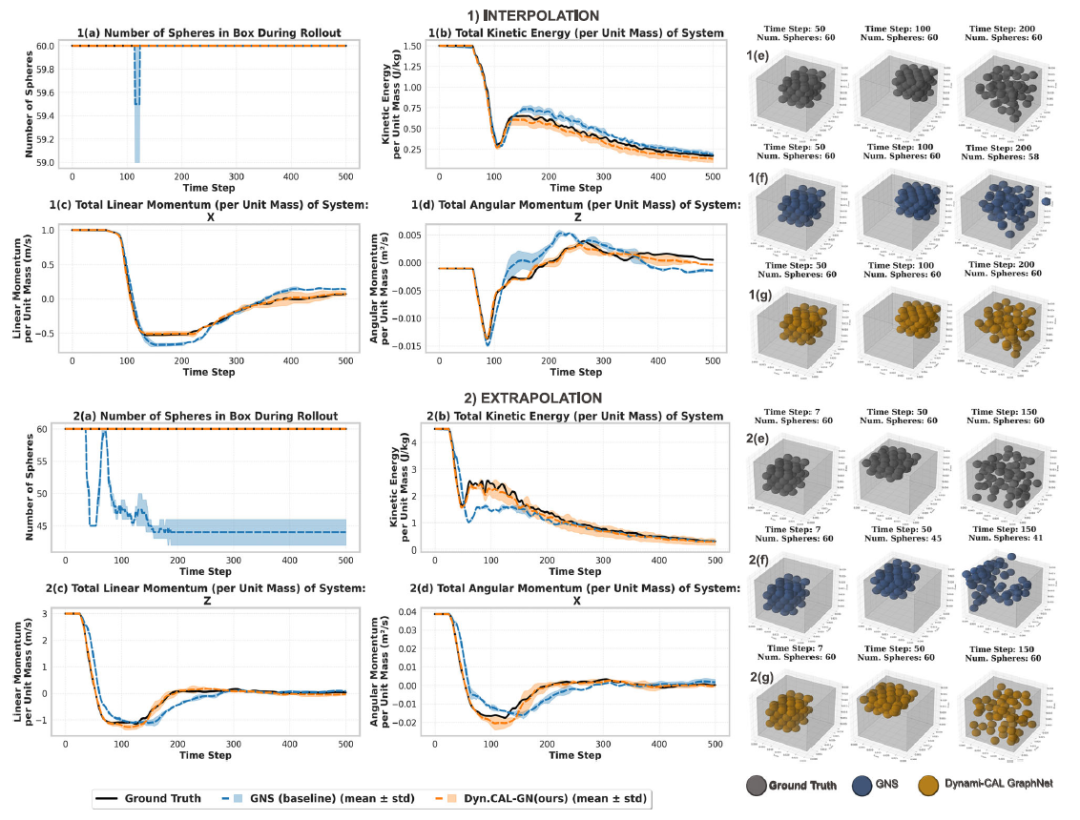
DYNAMI-CAL GRAPHNET a réussi à préserver toutes les particules, à suivre avec précision la décroissance de l'énergie cinétique, à maintenir une évolution cohérente de l'impulsion sur 500 étapes de prédiction et à présenter une variance minimale entre différentes graines aléatoires.À l'inverse, le modèle GNS diverge plus tôt dans les scénarios d'extrapolation et présente un phénomène d'échappement des particules. Ceci s'explique par le fait que, sous des conditions de forte impulsion, les vitesses de collision augmentent, ce qui exige un calcul précis des forces de contact impulsionnelles afin de maintenir les contraintes du système. Le modèle GNS peine à généraliser correctement et, même pour les particules qui ne s'échappent pas, ses prédictions s'écartent progressivement du comportement physique réel.
Ces résultats indiquent que :DYNAMI-CAL GRAPHNET présente une plus grande robustesse et une meilleure capacité de généralisation dans la modélisation des systèmes dynamiques dissipatifs à 6 degrés de liberté et à forte densité de contacts.
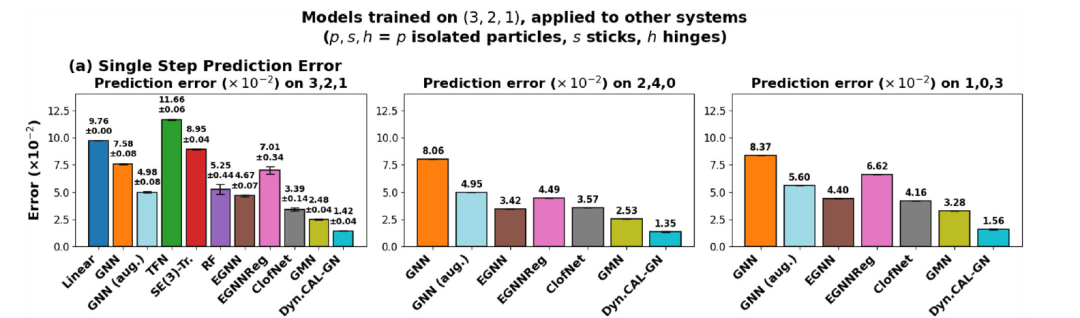
Dynamique à N corps contrainte
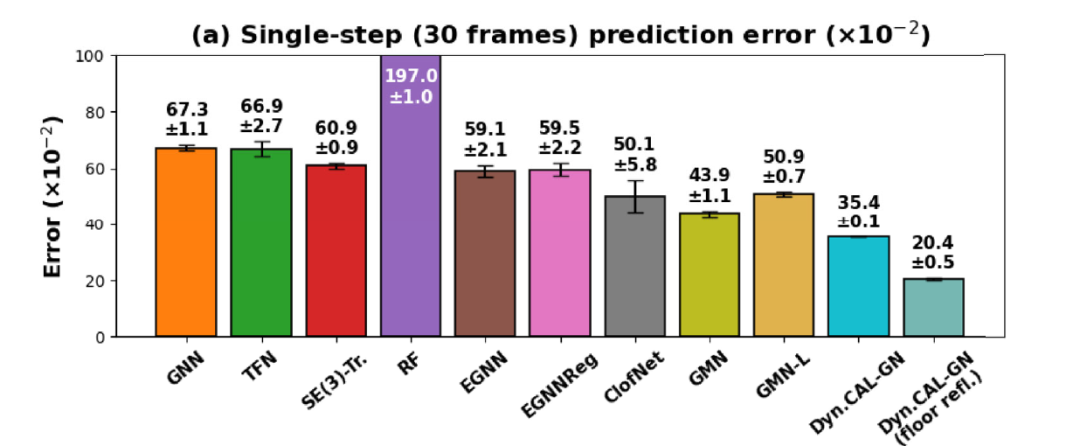
Globalement, DYNAMI-CAL GRAPHNET surpasse tous les modèles de référence dans les tâches de prédiction à une seule étape et à plusieurs étapes.
Dans la figure a ci-dessous, DYNAMI-CAL GRAPHNET a obtenu l'erreur de prédiction la plus faible à chaque étape, et ce pour différentes configurations de tiges, surpassant ainsi GMN, EGNN et ClofNet. Par la suite, les chercheurs ont introduit des améliorations par rotation et translation aléatoires, améliorant significativement les performances du GNN non équivariant et réduisant l'écart avec les modèles équivariants. Cependant, même avec un volume de données accru et une symétrie géométrique de contact explicite, GNN (aug.) restait en deçà des modèles équivariants les plus simples, EGNN et DYNAMI-CAL GRAPHNET, dans toutes les configurations de test.
Cela indique que :Le biais inductif dans l'architecture reste crucial pour généraliser la dynamique physique contrainte.
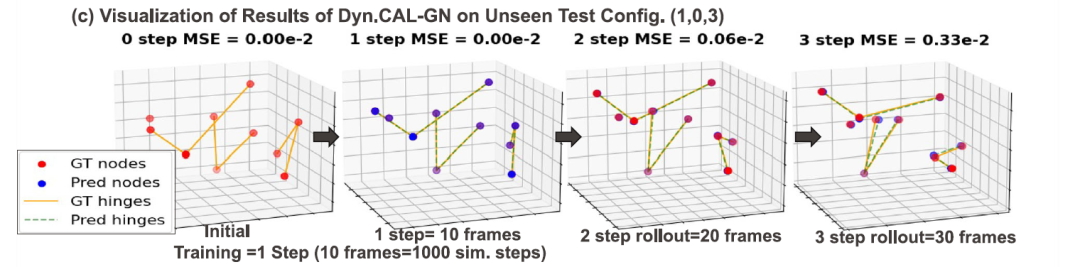
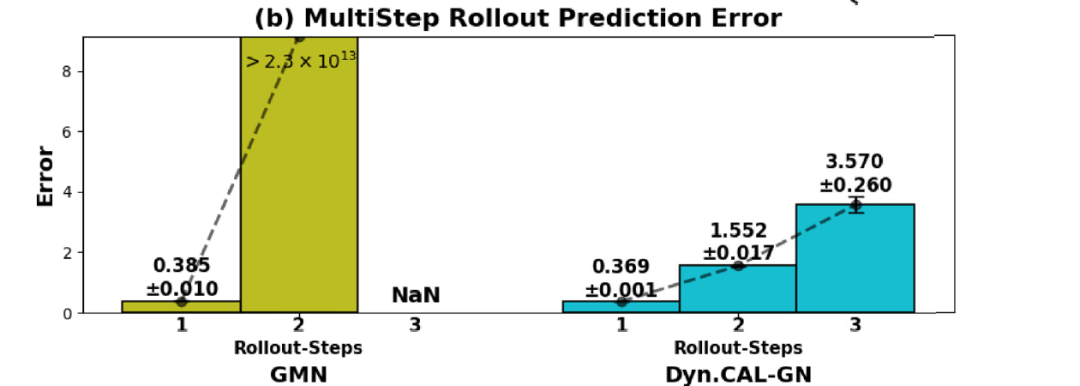
Pour la prédiction du déploiement en plusieurs étapes, la figure b ci-dessous compare DYNAMI-CAL GRAPHNET à GMN. Les résultats montrent que…Dans la prédiction glissante à plusieurs étapes avec un maximum de 4 étapes (où 1 étape = 10 images = 1000 étapes de simulation), DYNAMI-CAL GRAPHNET peut maintenir une précision de prédiction stable à long terme.L'erreur de prédiction du GMN s'accumulera progressivement et augmentera significativement au fil du temps.
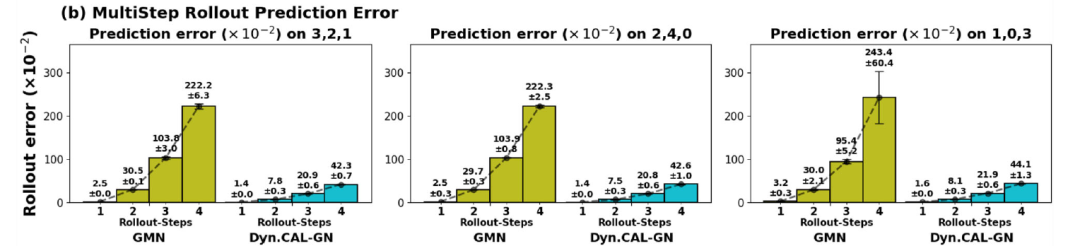
La figure c ci-dessous présente les résultats qualitatifs de prédiction du roulement sur une configuration structurelle (1, 0, 3) inédite. Bien que le modèle ait été entraîné avec une supervision en une seule étape sur des données présentant différentes topologies,La méthode proposée permet toujours de saisir avec précision le comportement dynamique des systèmes contraints.
Prédiction des mouvements humains
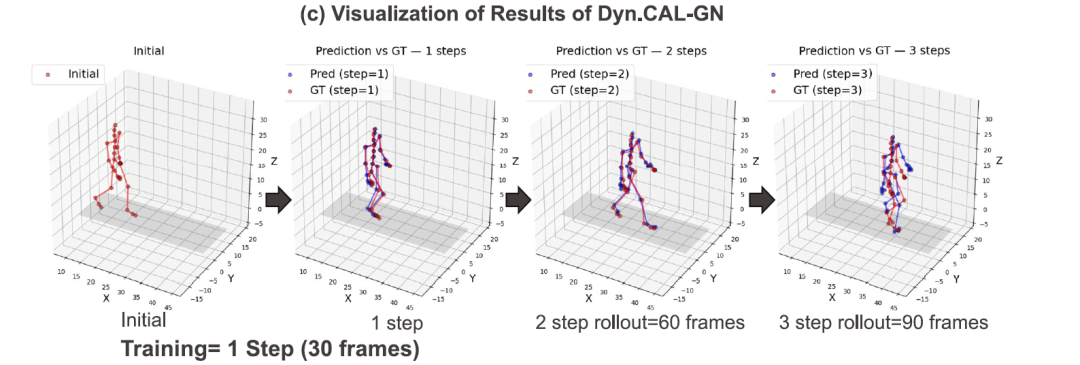
Dans les données de capture de mouvement humain, bien que le modèle n'utilise qu'un entraînement supervisé en une seule étape, il peut tout de même maintenir une trajectoire stable dans une prédiction en plusieurs étapes, ce qui montre que le modèle a appris avec succès la structure dynamique spatio-temporelle du mouvement humain.
La figure a ci-dessous illustre la précision de la prédiction en une seule étape sur le banc d'essai de marche humaine de l'université Carnegie Mellon. Les résultats indiquent que :DYNAMI-CAL GRAPHNET atteint le taux d'erreur le plus faible parmi toutes les méthodes, surpassant GMN. GMN utilise 19 articulations pour représenter le squelette humain et impose des contraintes via 6 connexions rigides définies manuellement, puis impose des contraintes via un module de cinématique directe (FK) conçu à la main.
La figure b ci-dessous montre que : bien que le modèle soit entraîné en utilisant uniquement une supervision en une seule étape,DYNAMI-CAL GRAPHNET maintient une précision stable dans la prédiction glissante multi-étapes, tandis que GMN diverge rapidement.
Les résultats qualitatifs de la figure c ci-dessous illustrent en outre que les trajectoires articulaires prédites sont continues et cohérentes, physiquement raisonnables et très cohérentes avec le mouvement réel, et peuvent rester stables dans la prédiction future de 90 images.
dynamique des protéines
Enfin, les chercheurs ont également évalué la capacité du modèle à modéliser la dynamique complexe des protéines induite par des perturbations thermiques. Les résultats ont montré que :DYNAMI-CAL GRAPHNET possède d'excellentes capacités de modélisation dynamique dans les systèmes complexes et à grain fin tels que les protéines.Elle peut non seulement capturer les vibrations microstructurales, mais aussi prédire les changements conformationnels à grande échelle, avec une précision de prédiction supérieure à celle de nombreuses méthodes de référence.
De la simulation physique aux modèles du monde d'intelligence incarnée
Avec le développement de l'intelligence artificielle, une nouvelle voie de recherche prend rapidement de l'ampleur : l'IA embarquée. Contrairement à l'IA traditionnelle, qui traite principalement du texte ou des images, l'IA embarquée met l'accent sur l'interaction entre les agents intelligents et le monde physique réel. Les robots, les systèmes de conduite autonome et les équipements de production intelligents constituent autant d'applications importantes de l'IA embarquée. Dans ces systèmes, les agents intelligents doivent non seulement percevoir leur environnement, mais aussi anticiper ses changements et adapter leurs stratégies en conséquence. Cela signifie qu'ils doivent être capables de comprendre et de prédire le comportement dynamique du monde physique.
Ces dernières années, de plus en plus de chercheurs ont proposé le concept de modèle du monde. Un modèle du monde désigne un modèle interne capable de simuler les changements dynamiques de l'environnement, permettant ainsi aux agents intelligents d'anticiper l'avenir. Cependant, la construction d'un modèle du monde réaliste et fiable représente un défi de taille.Dans la réalité, le mouvement des objets est généralement régi par des lois physiques complexes, telles que la conservation de la quantité de mouvement, le frottement et la dynamique des collisions. Si le modèle ne parvient pas à représenter fidèlement ces lois, les résultats de la prédiction peuvent facilement s'écarter de la réalité à plusieurs étapes du raisonnement.Dans ce contexte, les réseaux neuronaux d'information physique comme DYNAMI-CAL GraphNet offrent une nouvelle approche technologique pour le développement de l'intelligence incarnée.
De plus, l'industrie a réalisé des progrès considérables dans la prédiction efficace et précise de l'évolution des systèmes physiques complexes. Ces systèmes évoluent souvent à différentes échelles temporelles et spatiales, alors que la plupart des modèles d'apprentissage sont généralement entraînés uniquement sur la dynamique à court terme. Une fois utilisés pour des prédictions à long terme, les erreurs s'accumulent dans les systèmes complexes, ce qui entraîne une instabilité du modèle.
Dans ce contexte,Une équipe de recherche de la collaboration Polymathic AI a introduit une série de nouvelles méthodes pour relever les défis susmentionnés. Elle a proposé un modèle fondamental appelé Walrus, qui compte 1,3 milliard de paramètres, utilise le Transformer comme architecture de base et est principalement orienté vers la dynamique des milieux continus de type fluide. Lors de sa phase de pré-entraînement, Walrus couvre 19 scénarios physiques très diversifiés, englobant de multiples domaines tels que l'astrophysique, les sciences de la Terre, la rhéologie, la physique des plasmas, l'acoustique et la dynamique des fluides classique. Les résultats expérimentaux démontrent que Walrus surpasse les modèles de référence précédents, tant pour les prédictions à court terme qu'à long terme des tâches en aval, et présente une meilleure capacité de généralisation sur l'ensemble des données de pré-entraînement.
* Titre de l'article : Walrus : un modèle de base interdomaines pour la dynamique des milieux continus
* Lien vers l'article :https://arxiv.org/abs/2511.15684
La construction de modèles d'IA physique peut, d'une part, aider les scientifiques à simuler plus efficacement des systèmes complexes, tels que la dynamique moléculaire, la science des matériaux et les modèles climatiques ; d'autre part, elle peut également doter les robots intelligents d'une compréhension plus réaliste du monde. En un sens, permettre à l'intelligence artificielle de véritablement comprendre le monde physique pourrait constituer une étape importante vers une intelligence artificielle générale.
Références :
1.https://www.nature.com/articles/s41467-025-67802-5
2.https://mp.weixin.qq.com/s/fElxywueQ_an44rXkbjZ1A