HyperAI
Command Palette
Search for a command to run...
Ensemble De Données d'objets Saisis GRAB
Date
il y a 3 ans
Taille
5.51 GB
URL de publication
URL du document
Balises
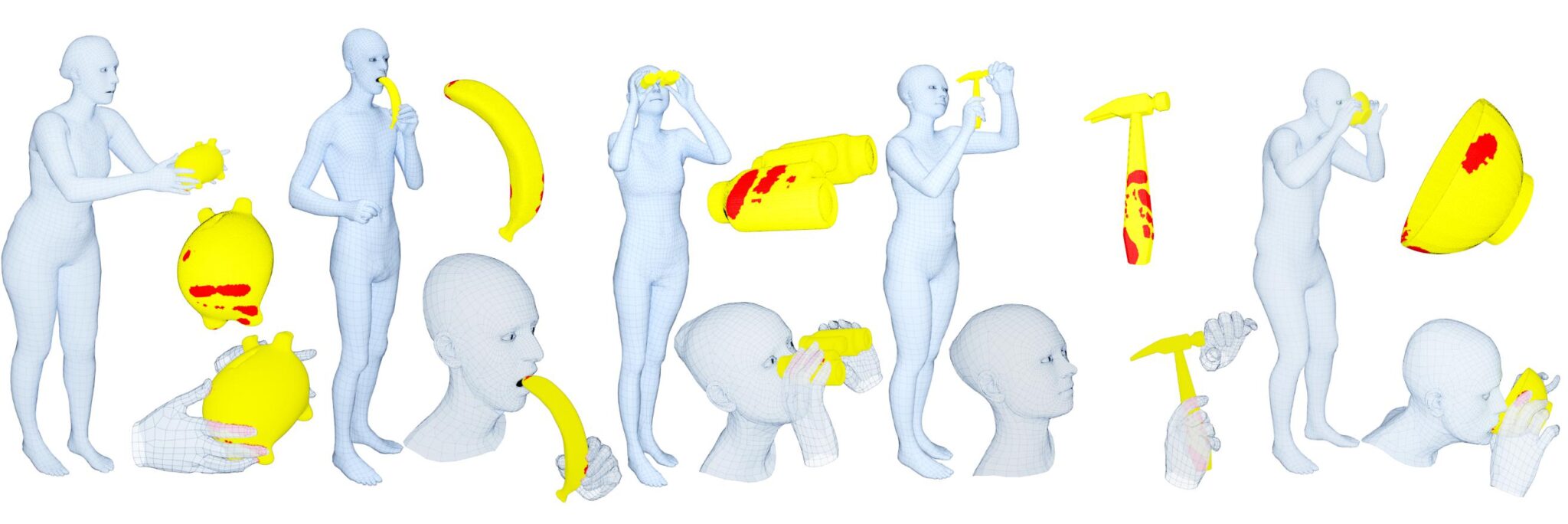
GRAB est un ensemble de données pour l'interaction de mouvement et la saisie d'objets 3D. L'ensemble de données contient des mouvements précis des doigts et du visage, ainsi que des contacts entre les objets et les corps. L'ensemble de données contient 5 participants masculins et 5 participants féminins et 4 intentions d'exercice différentes. L'ensemble de données contient également des cartes de contact binaires entre les corps et les objets.
GRAB.torrent
Seeding 2Téléchargement 0Terminé 517Total Downloads 636
Ce jeu de données est fourni par les utilisateurs de la communauté et est destiné uniquement à des fins éducatives et informatives. Si un contenu enfreint des droits d'auteur, veuillez nous contacter à [email protected] pour examen et retrait rapides.
Créer de l'IA avec l'IA
De l'idée au lancement — accélérez votre développement IA avec le co-codage IA gratuit, un environnement prêt à l'emploi et le meilleur prix pour les GPU.
Codage assisté par IA
GPU prêts à l’emploi
Tarifs les plus avantageux
HyperAI Newsletters
Abonnez-vous à nos dernières mises à jour
Nous vous enverrons les dernières mises à jour de la semaine dans votre boîte de réception à neuf heures chaque lundi matin
Propulsé par MailChimp