Command Palette
Search for a command to run...
The Bipedal Robot Completed a 5-kilometer Jog at a Pace of 9 Minutes and 18 Seconds Per kilometer.
Description: Oregon State University's Cassie completed a five-kilometer jog in 53 minutes, setting a new record for bipedal robots.
Recently, the bipedal robot Cassie, created by Agility Robotics, a well-known robotics research team from Oregon State University in the United States, took 53 minutes to complete a 5-kilometer jog, which attracted everyone's attention.
The pace is close to that of humans, and no need to charge for 5 kilometers
The research team Agility Robotics released a video that records the process and highlights of the five-kilometer run.

Cassie in the video resembles an ostrich, with deft joint movements and a steady pace.
Jonathan Hurst, founder of Agility Robotics and professor at Oregon State University, said: Cassie completed the five-kilometer run without charging, with only two stops to adjust, one for overheating and another for speeding around a curve, which took six and a half minutes.
That is to say, excluding the 6 and a half minutes of downtime adjustment, Cassie completed the five-kilometer jog in about 46:30, with a pace of 9m18s/km.

According to the team, Cassie is the first bipedal robot to "use machine learning to control running gait in an outdoor venue."
Based on recent research, the team completed the paper "Blind Bipedal Stair Traversal via Sim-to-Real Reinforcement Learning", which was selected for this year's Robotics: Science and Systems (RSS) conference.

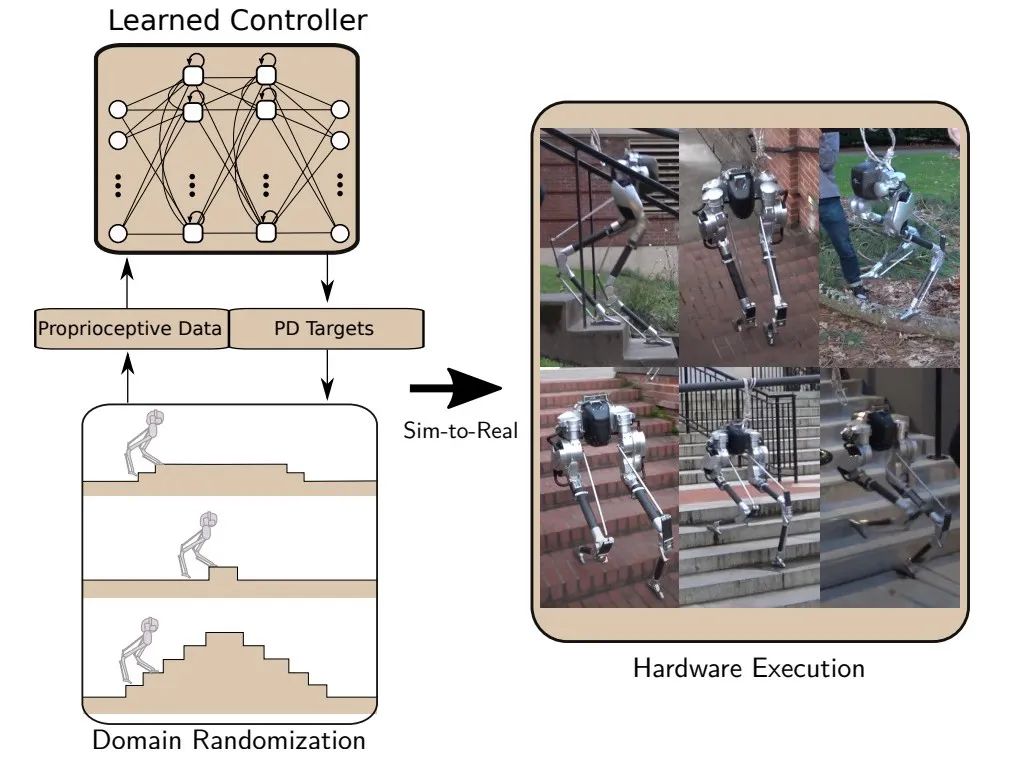
Through reinforcement learning, bipedal robots can be trained to simulate and adapt to changes in the ground at different heights. Moreover, with only slight changes to the existing flat-ground reinforcement learning framework, they can walk steadily on stairs, uneven ground and other scenarios.
It is worth mentioning that, whether it is jogging or stair scenes, Cassie relies entirely on the kinetic energy conduction of the lower limbs for motion calculations without visual input.
Bipedal robots, more like humans
The familiar four-legged robot, the internet-famous Boston Dynamics robot dog, has successfully found usage scenarios in the past few years by running, jumping, going up and down stairs, and even skipping rope and dancing.
But compared to quadruped robots that are often designed to look like animals, bipedal robots are more human-like in appearance and closer to humans in function.

Humans walk by sending commands from the brain to drive each joint to complete the movement. Bipedal robots need to simulate the human hips and soles to support the robot's walking and stability. Only by fully understanding the robot's dynamic characteristics can the robot be driven to complete efficient and complex movements.
The dynamics of the Cassie series of robots are based on the gait of birds, especially ostriches. Cassie's hips are designed with multiple free angles, but the knees can only bend in one direction. The ankles are designed to be flexible and strong. The overall shape is very light and can reduce vibration in a relatively natural way, similar to how humans walk.
The Agility Robotics team at the Dynamic Robotics Laboratory at the University of Oregon has a long-standing reputation in the robotics world.They started developing the Cassie series of bipedal robots in 2017, and after going through several versions, they have achieved a lot of results so far. They recently received US$1 million in research funding from DARPA.
The team said that the success of this five-kilometer non-charging jog gave them great confidence, and they will continue to transform and enhance Cassie's technology in the future to enter application scenarios such as logistics and distribution.
source:
– Oregon State University official website: Bipedal robot developed at Oregon State makes history by learning to run, completing 5K
– YouTube video “OSU Bipedal Robot First to Run 5K”