Command Palette
Search for a command to run...
Ein Bahnbrechender Durchbruch Im Maschinellen Lernen Für Physikalische Informationen! Eine Neuartige GNN-Architektur Ermöglicht Präzise Vorhersagen Komplexer Dynamischer Mehrkörpersysteme Und Revolutioniert Damit Robotik, Luft- Und Raumfahrt Sowie Materialwissenschaften.

In den letzten Jahren hat die künstliche Intelligenz große Fortschritte in Bereichen wie Bilderkennung und natürlicher Sprachverarbeitung erzielt, steht aber weiterhin vor zahlreichen Herausforderungen bei der Modellierung komplexer physikalischer Systeme. Viele reale Probleme – wie die Bewegung von Partikeln, Molekulardynamik, menschliche Bewegungen und die Simulation mechanischer Systeme – gehören zur Kategorie der Mehrkörperdynamiksysteme. Diese Systeme weisen typischerweise hochkomplexe Wechselwirkungen auf und müssen fundamentalen physikalischen Gesetzen, wie der Erhaltung von Impuls und Energie, strikt gehorchen.
Traditionelle numerische Simulationsmethoden können diese Systeme genau beschreiben, sind aber oft rechenaufwändig, insbesondere wenn Langzeitsimulationen oder großskalige Partikelsysteme erforderlich sind, bei denen Rechenressourcen in großen Mengen verbraucht werden.Gleichzeitig können maschinelle Lernmodelle zwar komplexe Zusammenhänge aus Daten lernen, es fehlen ihnen jedoch oft Einschränkungen durch physikalische Gesetze, was zu einer Anhäufung von Fehlern oder sogar zu einer Systemdivergenz bei langfristigen Vorhersagen führt.
Vor diesem Hintergrund hat sich maschinelles Lernen im Bereich physikalischer Informationen nach und nach zu einem Forschungsschwerpunkt entwickelt.Dynamische Modellierungsmethoden auf Basis von Graph Neural Networks (GNNs) haben in den letzten Jahren große Beachtung gefunden. Generative neuronale Netze (GNNs) können Wechselwirkungen zwischen Partikeln oder starren Körpern auf natürliche Weise darstellen: Knoten repräsentieren Objekte, Kanten hingegen Wechselwirkungen. Daher eignen sie sich gut zur Simulation von Mehrkörpersystemen. Datengetriebene Methoden wie GNNs weisen jedoch häufig Defizite in Bezug auf physikalische Konsistenz, Interpretierbarkeit und Generalisierungsfähigkeit auf.
Um dieses Problem zu lösen,Forscher der Eidgenössischen Technischen Hochschule Lausanne (EPFL) haben mit DYNAMI-CAL GraphNet eine neuartige, physikbasierte GNN-Architektur entwickelt, die die Lernfähigkeit von GNNs mit physikalisch begründeten induktiven Verzerrungen kombiniert. Durch die direkte Einbettung der Erhaltungssätze für linearen und Drehimpuls in die Modellstruktur werden diese beiden Erhaltungssätze explizit gewährleistet.
Experimentelle Ergebnisse zeigen, dass DYNAMI-CAL GRAPHNET erhebliche Vorteile in Bereichen bietet, die eine präzise, interpretierbare und echtzeitfähige Modellierung komplexer Mehrkörpersysteme erfordern, wie beispielsweise Robotik, Luft- und Raumfahrttechnik sowie Materialwissenschaften. Durch die Bereitstellung physikalisch konsistenter und skalierbarer Vorhersagemöglichkeiten, die den grundlegenden Erhaltungssätzen entsprechen, kann diese Methode Kräfte und Drehmomente in Systemen ableiten und gleichzeitig heterogene Wechselwirkungen und externe Kräfte effizient verarbeiten.
Die zugehörigen Forschungsergebnisse mit dem Titel „Ein physikbasiertes Graph-Neuronales Netzwerk zur Erhaltung des linearen und des Drehimpulses dynamischer Systeme“ wurden in Nature Communications veröffentlicht.
Forschungshighlights:
* In der isovarianten GNN-Architektur integriert DYNAMI-CAL GRAPHNET die Erhaltung des linearen Impulses und des Drehimpulses direkt in die Netzwerkstruktur, indem es das dritte Newtonsche Gesetz auf der Ebene der internen paarweisen Wechselwirkungen durchsetzt.
Diese Methode liefert physikalisch konsistente Vorhersagen auch bei komplexen nicht-zentralen Wechselwirkungen und dissipativen Effekten und ist auf eine Vielzahl von Systemen anwendbar.
Diese Architektur ist von großem Wert für die Entwicklung von Steuerungssystemen, die Optimierung mechanischer Prozesse und die Analyse des dynamischen Verhaltens natürlicher und technischer Systeme.
Papieradresse:
https://www.nature.com/articles/s41467-025-67802-5
Folgen Sie unserem offiziellen WeChat-Konto und antworten Sie im Hintergrund mit „Physics GNN“, um das vollständige PDF zu erhalten.
Vier verschiedene Arten von dynamischen Systemdatensätzen
Um die Allgemeingültigkeit des Modells zu überprüfen, führte das Forschungsteam Experimente an vier verschiedenen Datensätzen dynamischer Systeme durch.Diese Datensätze decken eine Vielzahl von Szenarien ab, von physikalischen Simulationen bis hin zu realen Daten. Darunter:
Partikel-Kollisionsdatensatz mit 6 Freiheitsgraden
Das Forschungsteam konstruierte ein Partikelkollisionssystem mit sechs Freiheitsgraden (6-DoF). In diesem System kann sich jedes Partikel nicht nur translatorisch, sondern auch rotatorisch bewegen und besitzt somit sechs Freiheitsgrade.
Der Trainingsdatensatz besteht aus 5 Trajektorien, die jeweils 60 identische Kugeln enthalten.Die Kugeln befinden sich in einem rechteckigen, geschlossenen Raum. Ihre Anfangsgeschwindigkeiten werden zufällig gewählt und gleichmäßig im Bereich von 1–2 m/s abgetastet. Jede Trajektorie umfasst 1500 Zeitschritte mit einem Abtastintervall von 10⁻⁴ Sekunden, während der Zeitschritt der zugrundeliegenden physikalischen Simulation 10⁻⁶ Sekunden beträgt. In jedem Zeitschritt werden die folgenden Zustandsinformationen jeder Kugel erfasst: Position, Lineargeschwindigkeit und Winkelgeschwindigkeit.
Der Validierungsdatensatz enthält eine Trajektorie, die nicht im Training verwendet wurde. Das System besteht außerdem aus 60 Kugeln und 200 Zeitschritten.Die anfängliche Geschwindigkeitsgröße liegt noch innerhalb des Trainingsbereichs, aber die Geschwindigkeitsrichtung weicht von den Trainingsdaten ab, die zur Überprüfung der Generalisierungsfähigkeit des Modells verwendet werden.
Der Testdatensatz für die Interpolation ist genauso aufgebaut wie der Validierungsdatensatz, allerdings beträgt die Trajektorienlänge 500 Zeitschritte.Wird verwendet, um die langfristige Vorhersagefähigkeit des Modells innerhalb des Trainingsverteilungsbereichs zu bewerten.
eingeschränktes N-Körper-System
Um bei klassischen N-Körper-Dynamikproblemen mit Nebenbedingungen die Anwendbarkeit des Modells auf gemischte Interaktionstypen und strukturell eingeschränkte Systeme zu bewerten,Die Forscher verwendeten den in der Literatur vorgeschlagenen Constrained N-Body-Datensatz.Dieser Datensatz erweitert die von Thomas Kipf et al. vorgeschlagene dreidimensionale Simulation geladener Teilchen, indem er vollständige Zwangsbedingungen in Form von starren Stäben und Gelenken zur Konstruktion des Systems einführt.
Bewegungsdaten von Menschen
Der dritte Datensatz stammt aus realen menschlichen Bewegungsdaten der CMU Motion Capture Database.Dieser Datensatz erfasst die dreidimensionalen Positionsänderungen menschlicher Skelettgelenke während Bewegungen wie Gehen, Laufen und Springen. Im Experiment wählten die Forscher die Gehdaten einer Versuchsperson aus und modellierten die menschlichen Skelettgelenke als Graphstruktur, wobei die Knoten die Gelenke und die Kanten die Knochenverbindungen repräsentieren. Dieses Experiment diente primär der Validierung der Leistungsfähigkeit des Modells in realen, komplexen Bewegungssystemen.
Protein-Molekulardynamik
Der letzte Datensatz stammt aus Molekulardynamiksimulationen von Proteinen.Die Forscher nutzten den Apo-Adenosin-Kinase (AdK)-Gleichgewichtstrajektorien-Datensatz, der mithilfe des MDAnalysis-Toolkits erfasst wurde und die Bewegung von Proteinen auf atomarer Ebene in einer Umgebung expliziter Wassermoleküle und Ionen aufzeichnet.
DYNAMI-CAL GraphNet: Eine neuartige, physikalisch informationsgesteuerte GNN-Architektur
Die Kernidee von DYNAMI-CAL GraphNet besteht darin, physikalische Erhaltungssätze direkt in die Struktur des neuronalen Netzes einzubetten. Die Gesamtarchitektur ist in der folgenden Abbildung dargestellt.Es lässt sich in drei Hauptphasen unterteilen:
① Diagrammdarstellung;
② Ein Skalarisierungs-Vektorisierungs-Schema mit Erhaltung des linearen Impulses und des Drehimpulses;
③ Räumlich-zeitliche Nachrichtenübertragung.
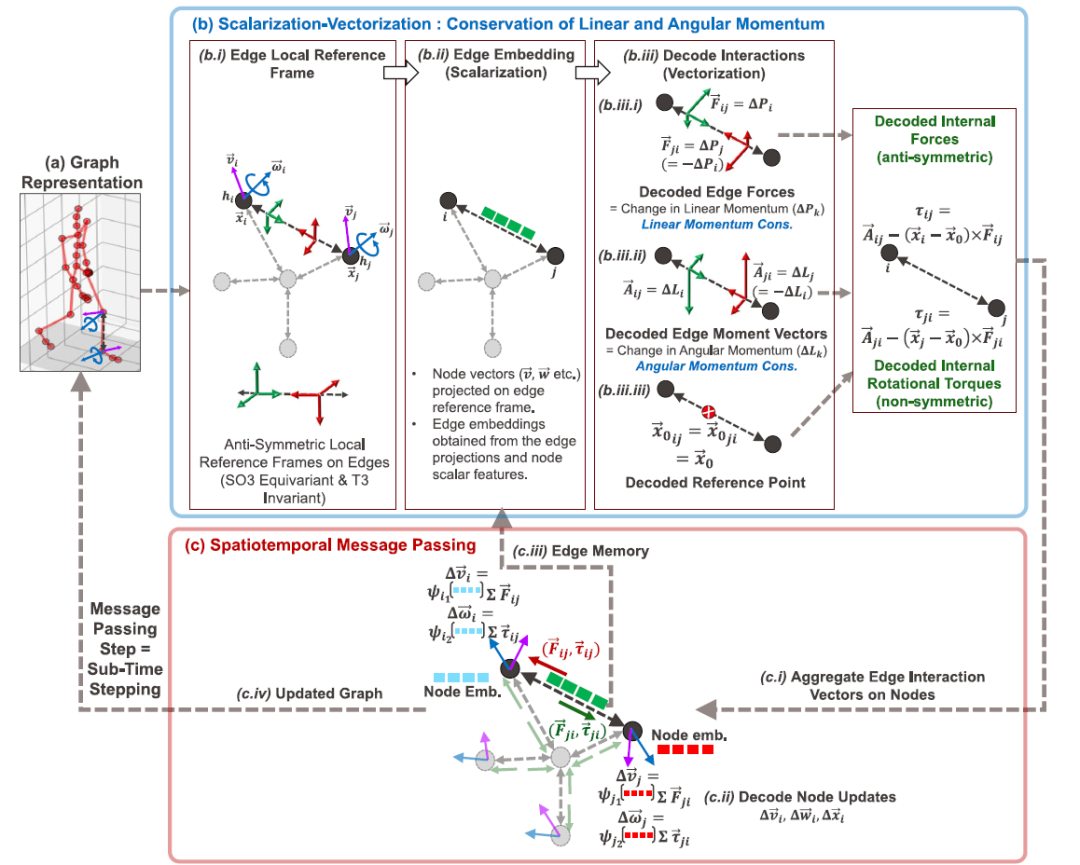
Phase 1: Graphische Darstellung
Zunächst stellten die Forscher das Mehrkörpersystem als Graph dar: Knoten repräsentieren Objekte oder Partikel, und Kanten repräsentieren Wechselwirkungen zwischen Objekten.Jeder Knoten enthält mehrere Merkmale, wie z. B. Position, Geschwindigkeit, Winkelgeschwindigkeit und Objekteigenschaften (Masse, Ladung usw.); die Kanten hingegen stellen die relativen Positionen und Wechselwirkungsbeziehungen zwischen zwei Objekten dar.
Phase Zwei: Skalarisierung-Vektorisierung
* Skalarisierung
Während der Skalarisierungsphase wandelt das Modell die Vektorinformationen von Knoten und Kanten in hochdimensionale skalare Einbettungen um. Eine zentrale Neuerung besteht darin, dass jeder Kante ein lokales orthogonales Referenzkoordinatensystem mit folgenden Eigenschaften zugewiesen wird: Isovarianz gegenüber 3D-Rotation SO(3), Invarianz gegenüber Translation T(3) und Antisymmetrie beim Vertauschen von Knoten. In praktischen Anwendungen bedeutet dies, dass sich bei Umkehrung der Kantenrichtung die Vorzeichen der drei Basisvektoren ändern. Dadurch wird sichergestellt, dass alle nachfolgenden Projektionen und Interaktionsberechnungen die Antisymmetrie erfüllen.
Im Skalarisierungsschritt werden Knotenvektormerkmale (wie Geschwindigkeit und Winkelgeschwindigkeit) auf das lokale Koordinatensystem dieser Kanten projiziert, um Skalarkomponenten zu erhalten. Diese Skalare werden dann mit anderen Knotenskalarmerkmalen kombiniert, um Kanteneinbettungen zu erzeugen, die unempfindlich gegenüber der Knotenreihenfolge sind.Diese Methode kodiert sowohl Richtungs- als auch Skalarinformationen über lokale Wechselwirkungen unter Beibehaltung der Systemsymmetrie.
* Vektorisierung
Während der Vektorisierungsphase dekodiert das Modell die inneren Kräfte und Drehmomente aus den Kantenvektoren. Diese Kräfte werden dann auf die Knoten aggregiert, um die Lineargeschwindigkeit, die Winkelgeschwindigkeit und die Position der Partikel zu aktualisieren.Da die Modellkonstruktion vorschreibt, dass Kräfte und Momente der Antisymmetrie genügen müssen, erfüllt das System auf natürliche Weise die Erhaltung des linearen Impulses und des Drehimpulses.
Phase 3: Räumlich-zeitliche Nachrichtenübermittlung
Nach der Berechnung der physikalisch konsistenten inneren Kräfte und Momente an jeder KanteDas Modell wird den raumzeitlichen Nachrichtenübermittlungsmechanismus von DYNAMI-CAL GRAPHNET ausführen.
Zunächst werden die dekodierten internen Kräfte und Drehmomente auf Kantenebene an den Verbindungsknoten aggregiert, um die resultierende Kraft und das resultierende Drehmoment an jedem Knoten zu ermitteln. Anschließend werden diese Vektoren mit Koeffizienten multipliziert, die durch skalare Knoteneinbettung gewonnen werden, um die lineare und die Winkelgeschwindigkeit der Knoten zu aktualisieren. Abschließend wird die aktualisierte Position mithilfe impliziter Euler-Integrale berechnet. Dieser Prozess bildet eine Message-Passing-Schicht von DYNAMI-CAL GRAPHNET.
In der nächsten Runde der Kantenkodierung wird diese sich schrittweise entwickelnde Repräsentation als latenter Speicher jeder Kante erhalten, wodurch das Modell in die Lage versetzt wird, echtes raumzeitliches Denken zu erreichen.
Dieses Design ermöglicht es DYNAMI-CAL GRAPHNET, das dynamische Verhalten eines Systems über mehrere Zeitskalen hinweg zu erfassen und gleichzeitig bei jedem Rechenschritt eine physikalisch begründete induktive Voreingenommenheit beizubehalten.
Experimentelles Fazit: Stabilität und Generalisierungsfähigkeit werden signifikant verbessert.
Forscher evaluierten die Leistung von DYNAMI-CAL GraphNet anhand von vier Benchmark-Aufgaben, die sowohl simulierte als auch reale physikalische Systeme umfassten. Experimente mit verschiedenen Datensätzen zeigen, dass DYNAMI-CAL GraphNet bestehende Methoden in mehreren Metriken übertrifft.
Granularer 6-DoF-Kollisionsbenchmark
Es wurde ein Rollvorhersageexperiment mit 6 Freiheitsgraden (6-DOF) von 60 Kugeln in einem quaderförmigen Behälter durchgeführt. Die folgende Abbildung zeigt einen Vergleich zwischen DYNAMI-CAL GRAPHNET und GNS:
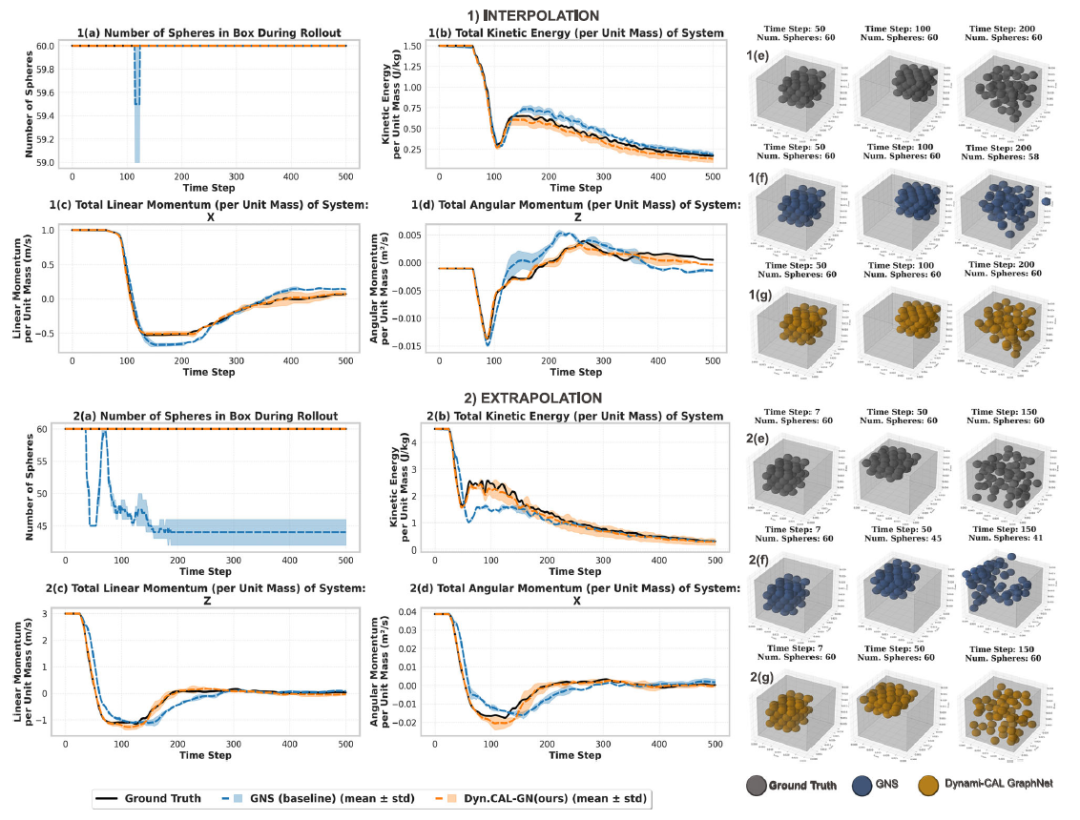
DYNAMI-CAL GRAPHNET bewahrte erfolgreich alle Partikel, verfolgte den kinetischen Energieabfall genau, hielt die Impulsentwicklung über 500 Vorhersageschritte hinweg konsistent aufrecht und wies eine minimale Varianz über verschiedene Zufallsstartwerte hinweg auf.Im Gegensatz dazu divergiert das GNS-Modell in Extrapolationsszenarien früher und zeigt Teilchenentweichungen. Dies liegt daran, dass unter Bedingungen hoher Impulse die Kollisionsgeschwindigkeiten zunehmen, was eine genaue Berechnung der Impulskontaktkräfte erfordert, um die Systembeschränkungen einzuhalten. Das GNS-Modell generalisiert nur unzureichend, und selbst für Teilchen, die nicht entweichen, weichen seine Vorhersagen allmählich vom tatsächlichen physikalischen Verhalten ab.
Diese Ergebnisse deuten darauf hin, dass:DYNAMI-CAL GRAPHNET weist eine höhere Robustheit und Generalisierungsfähigkeit bei der Modellierung dissipativer, kontaktdichter 6-DoF-dynamischer Systeme auf.
Dynamik von N-Körpern mit Einschränkungen
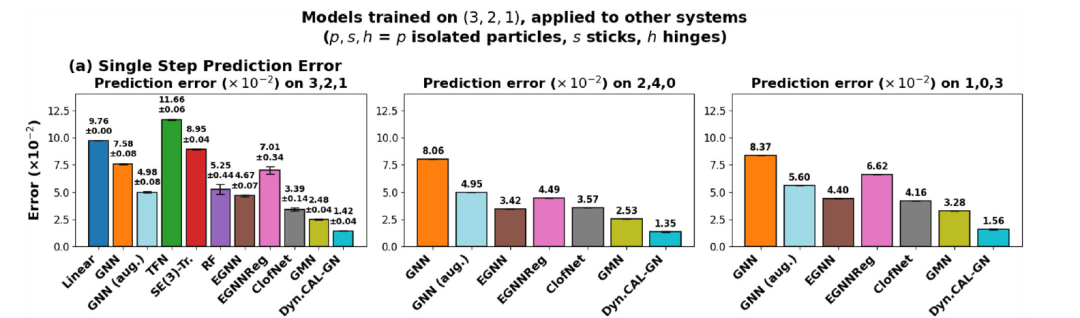
Insgesamt übertrifft DYNAMI-CAL GRAPHNET alle Basismodelle sowohl bei einstufigen als auch bei mehrstufigen Vorhersageaufgaben.
In Abbildung a unten erzielte DYNAMI-CAL GRAPHNET den niedrigsten Vorhersagefehler in verschiedenen Stammkonfigurationen und übertraf damit GMN, EGNN und ClofNet. Anschließend führten Forscher Verbesserungen durch zufällige Rotation und Translation ein, wodurch die Leistung des nicht-äquivarianten GNN deutlich verbessert und der Abstand zu äquivarianten Modellen verringert wurde. Selbst mit erhöhtem Datenvolumen und expliziter geometrischer Kontaktsymmetrie blieb GNN (aug.) jedoch in allen Testkonfigurationen hinter den einfachsten äquivarianten Modellen, EGNN und DYNAMI-CAL GRAPHNET, zurück.
Dies deutet darauf hin, dass:Induktive Voreingenommenheit in der Architektur bleibt entscheidend für die Verallgemeinerung eingeschränkter physikalischer Dynamiken.
Für die mehrstufige Rollout-Vorhersage vergleicht Abbildung b unten DYNAMI-CAL GRAPHNET mit GMN. Die Ergebnisse zeigen, dass…Bei mehrstufiger rollierender Vorhersage mit maximal 4 Schritten (wobei 1 Schritt = 10 Frames = 1000 Simulationsschritte) kann DYNAMI-CAL GRAPHNET eine stabile Langzeitvorhersagegenauigkeit aufrechterhalten.Der Vorhersagefehler von GMN akkumuliert sich allmählich und nimmt mit der Zeit deutlich zu.
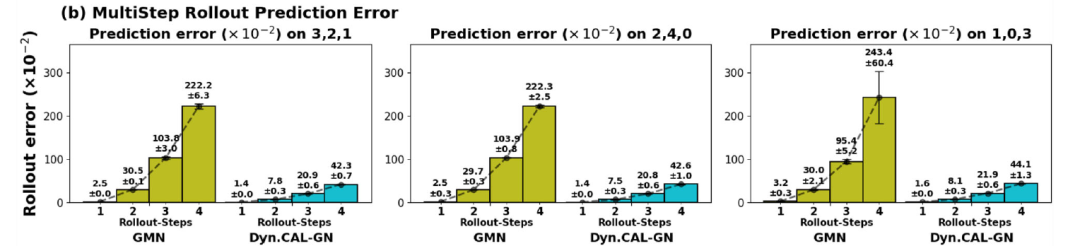
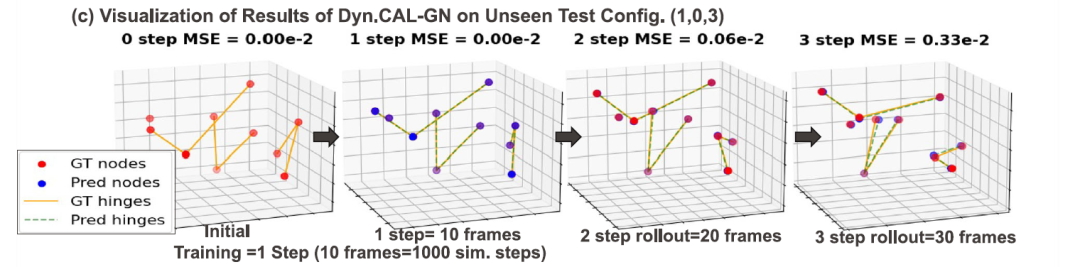
Abbildung c unten zeigt die qualitativen Ergebnisse der Rollvorhersage für eine unbekannte (1, 0, 3)-Strukturkonfiguration. Obwohl das Modell nur mit einstufiger Überwachung anhand von Daten mit unterschiedlichen Topologien trainiert wurde,Die vorgeschlagene Methode kann das dynamische Verhalten von Systemen mit Beschränkungen weiterhin präzise erfassen.
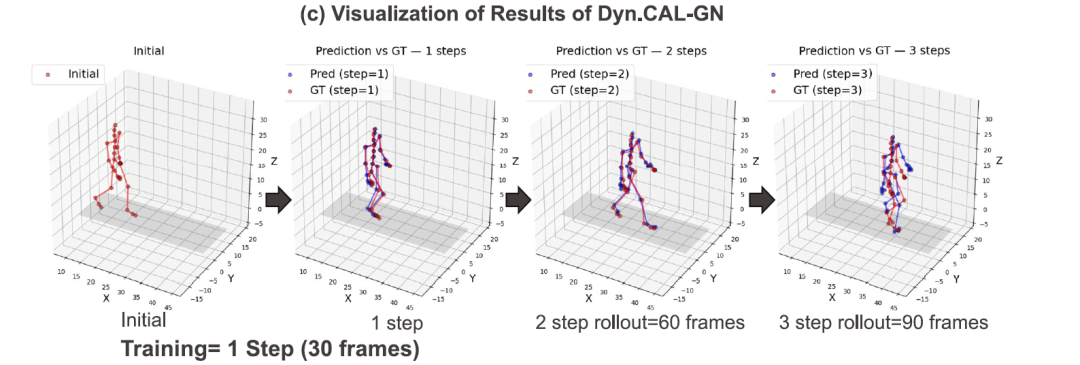
Vorhersage menschlicher Bewegungen
Bei der Erfassung von menschlichen Bewegungsdaten kann das Modell, obwohl es nur einstufiges überwachtes Training verwendet, dennoch eine stabile Trajektorie bei der Mehrschrittvorhersage aufrechterhalten. Dies zeigt, dass das Modell die raumzeitliche dynamische Struktur der menschlichen Bewegung erfolgreich erlernt hat.
Abbildung a unten zeigt die Genauigkeit der Einzelschrittvorhersage auf dem CMU-Benchmark für menschliches Gehen. Die Ergebnisse deuten darauf hin, dass:DYNAMI-CAL GRAPHNET erzielt den geringsten Fehler aller Methoden und übertrifft damit GMN. GMN verwendet 19 Gelenke zur Darstellung des menschlichen Skeletts und setzt Einschränkungen durch 6 manuell definierte starre Verbindungen durch und setzt dann Einschränkungen durch ein handentwickeltes Vorwärtskinematik-Modul (FK) durch.
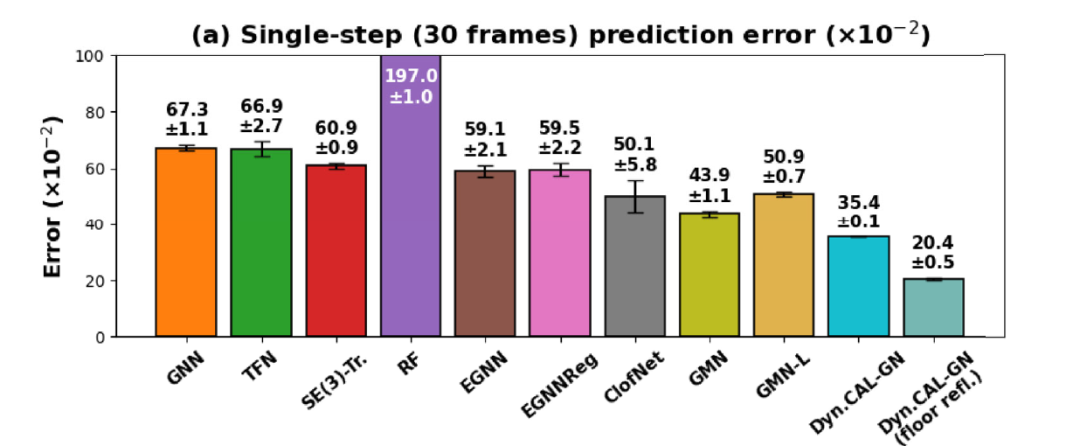
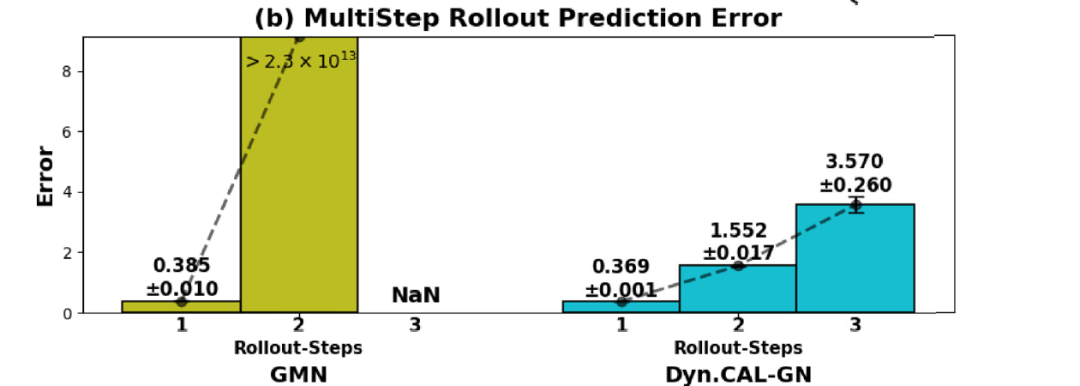
Abbildung b unten zeigt Folgendes: Obwohl das Modell nur mit Einzelschrittüberwachung trainiert wird,DYNAMI-CAL GRAPHNET behält eine stabile Genauigkeit bei der mehrstufigen rollierenden Vorhersage bei, während GMN schnell divergiert.
Die qualitativen Ergebnisse in Abbildung c unten verdeutlichen weiterhin, dass die vorhergesagten Gelenktrajektorien stetig und konsistent, physikalisch plausibel und sehr gut mit der tatsächlichen Bewegung übereinstimmend sind und auch in der zukünftigen Vorhersage von 90 Frames stabil bleiben können.
Proteindynamik
Abschließend bewerteten die Forscher auch die Fähigkeit des Modells, komplexe, durch thermische Störungen bedingte Proteindynamiken abzubilden. Die Ergebnisse zeigten Folgendes:DYNAMI-CAL GRAPHNET verfügt über ausgezeichnete dynamische Modellierungsfähigkeiten in komplexen, feinkörnigen Systemen wie Proteinen.Es kann nicht nur mikrostrukturelle Schwingungen erfassen, sondern auch großflächige Konformationsänderungen vorhersagen, wobei die Vorhersagegenauigkeit die vieler Basismethoden übertrifft.
Von der Physiksimulation zu verkörperten Intelligenz-Weltmodellen
Mit der Entwicklung künstlicher Intelligenz gewinnt ein neuer Forschungszweig rasant an Bedeutung: eingebettete KI. Anders als traditionelle KI, die primär Text oder Bilder verarbeitet, legt eingebettete KI den Fokus auf die Interaktion intelligenter Agenten mit der realen, physischen Welt. Roboter, autonome Fahrsysteme und intelligente Fertigungsanlagen sind wichtige Anwendungsbereiche für eingebettete KI. In diesen Systemen müssen intelligente Agenten nicht nur ihre Umgebung wahrnehmen, sondern auch Veränderungen vorhersagen und entsprechende Handlungsstrategien entwickeln. Das bedeutet, sie müssen die Fähigkeit besitzen, das dynamische Verhalten der physischen Welt zu verstehen und vorherzusagen.
In den letzten Jahren haben immer mehr Forscher das Konzept eines Weltmodells vorgeschlagen. Ein Weltmodell ist ein internes Modell, das dynamische Veränderungen in der Umgebung simulieren kann und es intelligenten Agenten ermöglicht, die Zukunft gedanklich vorherzusagen. Die Entwicklung eines realistischen und zuverlässigen Weltmodells ist jedoch keine leichte Aufgabe.In der Realität unterliegt die Bewegung von Objekten üblicherweise komplexen physikalischen Gesetzen, wie etwa der Impulserhaltung, der Reibung und der Stoßdynamik. Kann das Modell diese Gesetze nicht präzise abbilden, können die Vorhersageergebnisse bereits nach mehreren Rechenschritten leicht von der Realität abweichen.Vor diesem Hintergrund bieten physikalische Informations-Neuronale Netze wie DYNAMI-CAL GraphNet einen neuen technologischen Ansatz für die Entwicklung verkörperter Intelligenz.
Darüber hinaus hat die Branche bedeutende Fortschritte bei der effizienten und präzisen Vorhersage der Entwicklung komplexer physikalischer Systeme erzielt. Physikalische Systeme entwickeln sich häufig über mehrere zeitliche und räumliche Skalen hinweg, während die meisten Lernmodelle typischerweise nur mit kurzfristigen Dynamiken trainiert werden. Werden sie für Langzeitprognosen verwendet, akkumulieren sich Fehler in komplexen Systemen und führen zu Modellinstabilität.
In diesem ZusammenhangEin Forschungsteam der Polymathic AI Collaboration stellte eine Reihe neuer Methoden zur Bewältigung der oben genannten Herausforderungen vor. Sie schlugen ein fundamentales Modell namens Walrus vor, das 1,3 Milliarden Parameter umfasst, Transformer als Kernarchitektur nutzt und hauptsächlich auf die Dynamik von fluidartigen Kontinuumssystemen ausgerichtet ist. Walrus deckt in seiner Vortrainingsphase 19 sehr unterschiedliche physikalische Szenarien ab, die verschiedene Bereiche wie Astrophysik, Geowissenschaften, Rheologie, Plasmaphysik, Akustik und klassische Fluiddynamik umfassen. Experimentelle Ergebnisse zeigen, dass Walrus bisherige Basismodelle sowohl bei kurz- als auch langfristigen Vorhersagen für nachgelagerte Aufgaben übertrifft und eine stärkere Generalisierungsleistung über die gesamte Verteilung der Vortrainingsdaten hinweg aufweist.
* Titel des Beitrags: Walross: Ein domänenübergreifendes Grundlagenmodell für die Kontinuumsdynamik
* Link zum Artikel:https://arxiv.org/abs/2511.15684
Die Entwicklung physikalischer KI-Modelle kann einerseits Wissenschaftlern helfen, komplexe Systeme wie Molekulardynamik, Materialwissenschaften und Klimamodelle effizienter zu simulieren; andererseits kann sie intelligenten Robotern ein realistischeres Verständnis der Welt vermitteln. In gewisser Weise könnte die Befähigung künstlicher Intelligenz, die physikalische Welt wirklich zu verstehen, ein wichtiger Schritt hin zu allgemeiner künstlicher Intelligenz sein.
Quellen:
1.https://www.nature.com/articles/s41467-025-67802-5
2.https://mp.weixin.qq.com/s/fElxywueQ_an44rXkbjZ1A