Command Palette
Search for a command to run...
TUM RGB-D-Datensatz Zur Gleichzeitigen Lokalisierung Und Kartierung
Datum
Organisation
Veröffentlichungs-URL
Paper-URL
Lizenz
CC BY 4.0
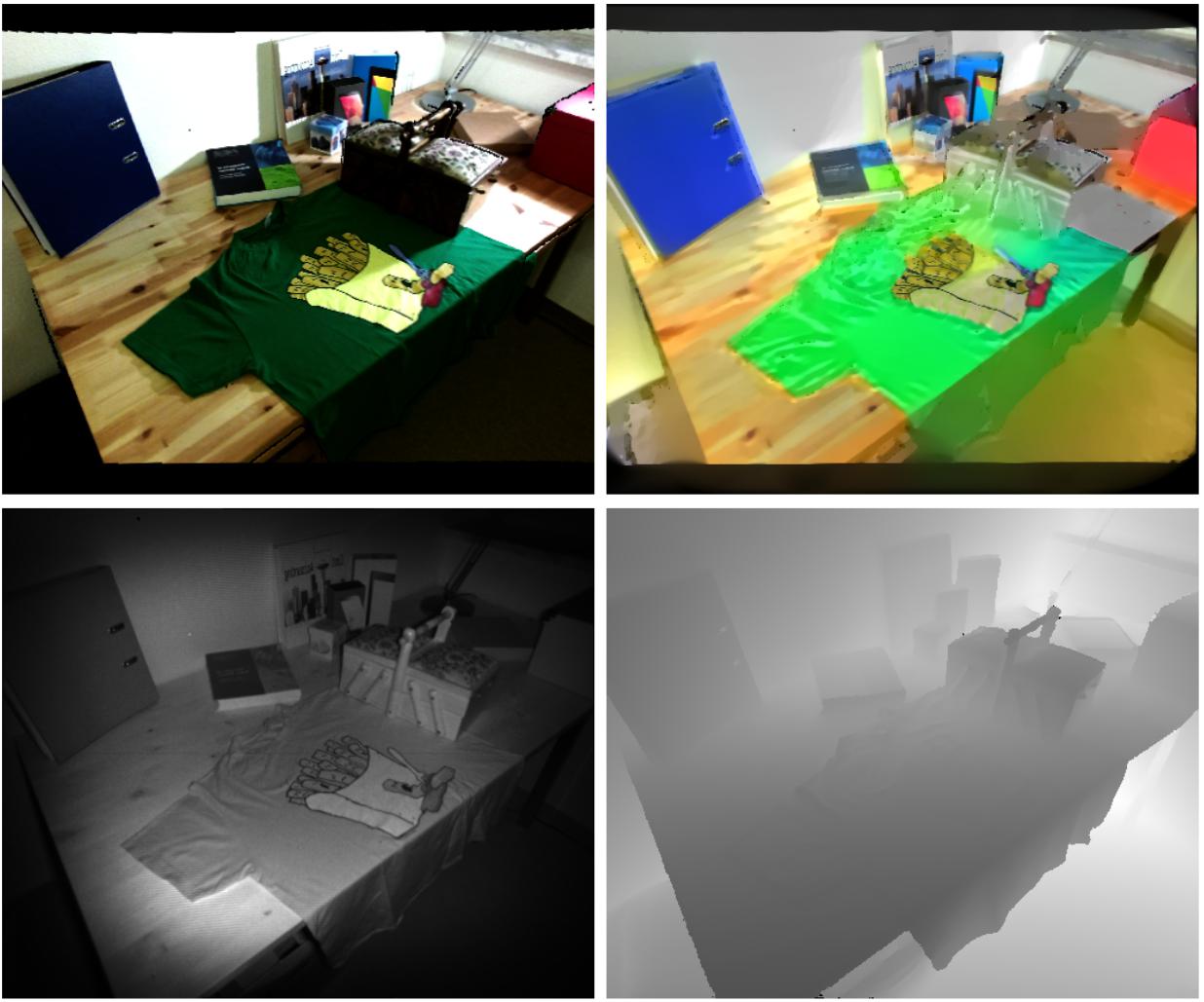
TUM RGB-D ist ein RGB-D-Datensatz, der Farb- und Tiefenbilder enthält, die vom Microsoft Kinect-Sensor entlang der Ground-Truth-Trajektorie des Sensors aufgezeichnet wurden. Die Daten wurden mit voller Bildrate (30 Hz) und Sensorauflösung (640 x 480 Pixel) aufgezeichnet. Die Ground-Truth-Trajektorien wurden durch ein hochpräzises Motion-Capture-System mit acht Hochgeschwindigkeits-Tracking-Kameras (100 Hz) erfasst. Der Datensatz besteht aus 39 Sequenzen, die mit einem Microsoft Kinect-Sensor in verschiedenen Innenszenen aufgezeichnet wurden, darunter Testen und Debuggen, Handheld-SLAM, Roboter-SLAM, Struktur vs. Textur, dynamische Objekte, 3D-Objektrekonstruktion, Validierungsdateien und Kalibrierungsdateien, die Datensätze für verschiedene Aufgaben sind. Jede Kategorie enthält mehrere Daten und kann für Leistungstests verschiedener Aufgaben verwendet werden.
KI mit KI entwickeln
Von der Idee bis zum Launch – beschleunigen Sie Ihre KI-Entwicklung mit kostenlosem KI-Co-Coding, sofort einsatzbereiter Umgebung und bestem GPU-Preis.