HyperAI
Command Palette
Search for a command to run...
ROCKET-2: 3Dゲームゼロショット転送
1. チュートリアルの概要

ROCKET-2は、CraftJarvisチームによって2025年3月21日に発表された、クロスビューターゲットアライメント視覚運動制御フレームワークです。ロボット工学における複雑なタスク制御問題の解決に重点を置いています。革新的なマルチビューターゲットアライメント技術により、このプロジェクトは動的環境における視覚運動ポリシーの汎化能力と制御性を大幅に向上させます。関連研究論文もご覧いただけます。 ROCKET-2: クロスビュー目標アライメントによる視覚運動ポリシーのステアリング 。
このチュートリアルでは、リソースとして単一の RTX 5090 カードを使用します。
2. プロジェクト例

3. 操作手順
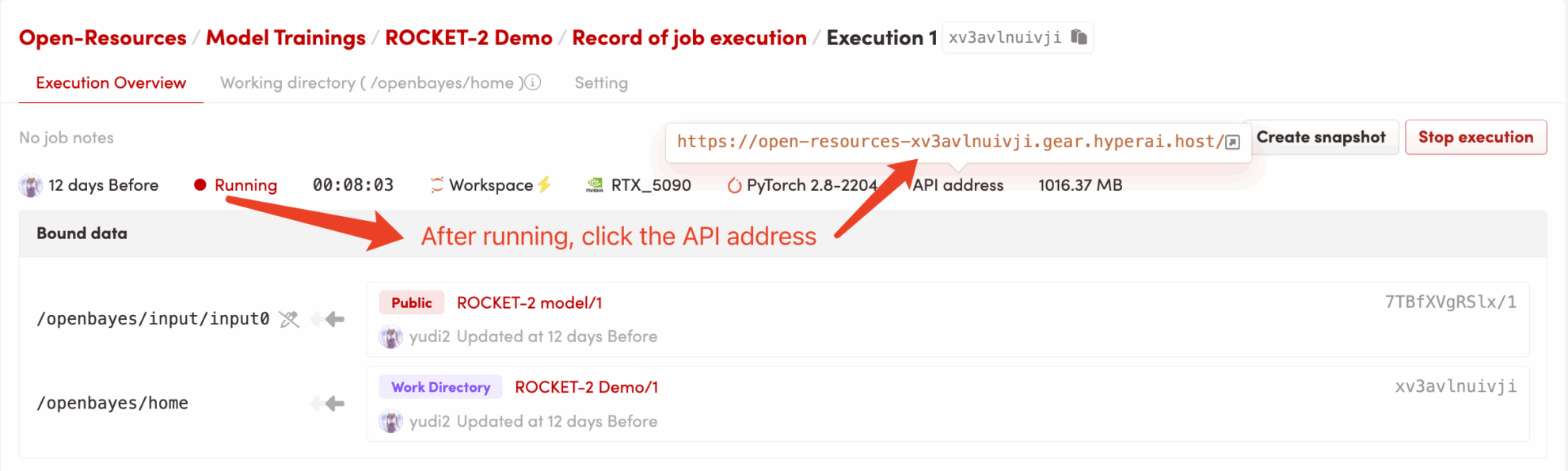
1. コンテナを起動した後、API アドレスをクリックして Web インターフェイスに入ります
「Bad Gateway」と表示される場合、モデルが初期化中であることを意味します。モデルが大きいため、1〜2分ほど待ってページを更新してください。
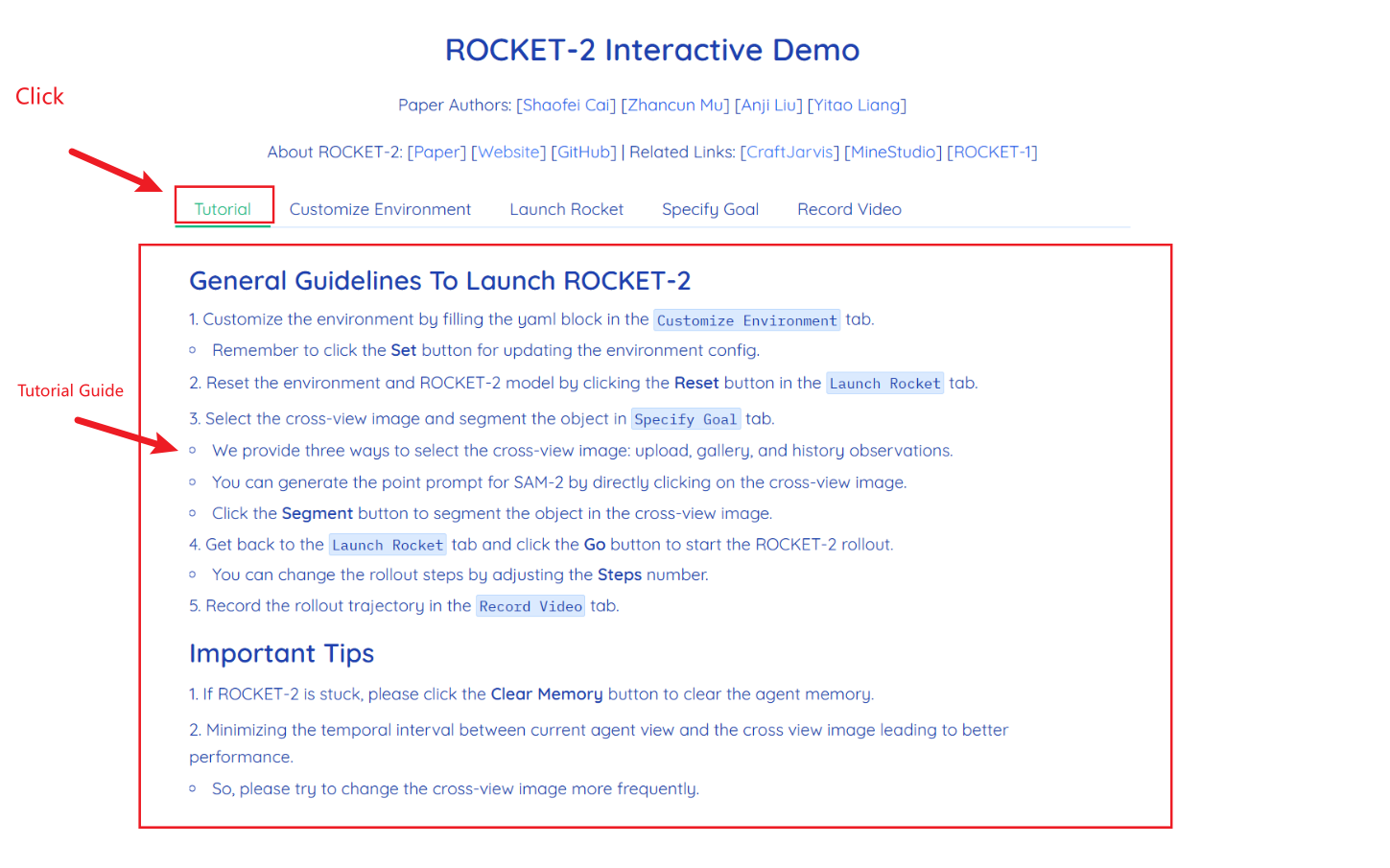
2. Web ページに入ると、モデルと会話を開始できます。
利用手順
- チュートリアルガイドを表示するにはチュートリアルへ進んでください
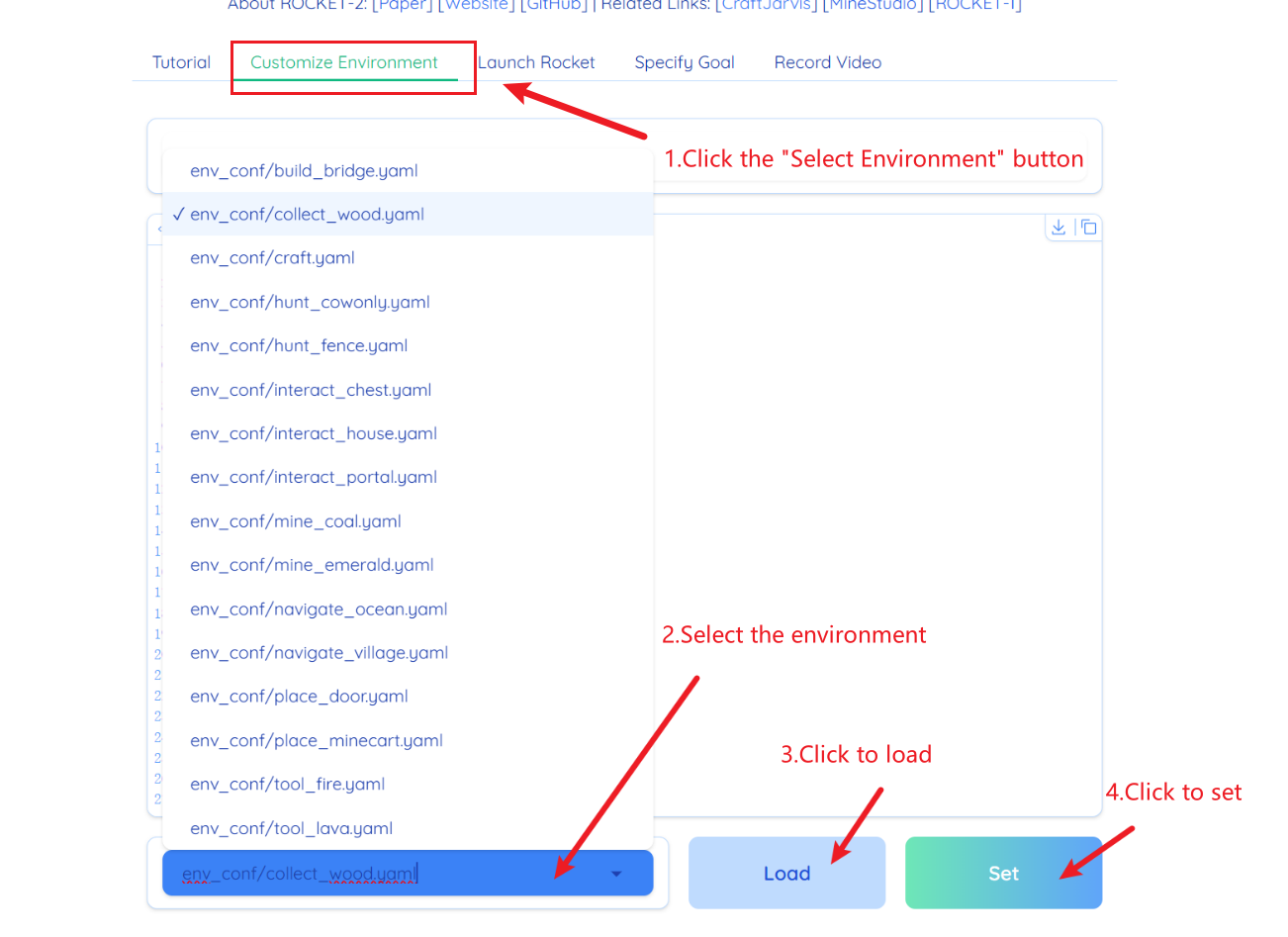
- 環境のカスタマイズに入り、ロードしたい環境を選択します
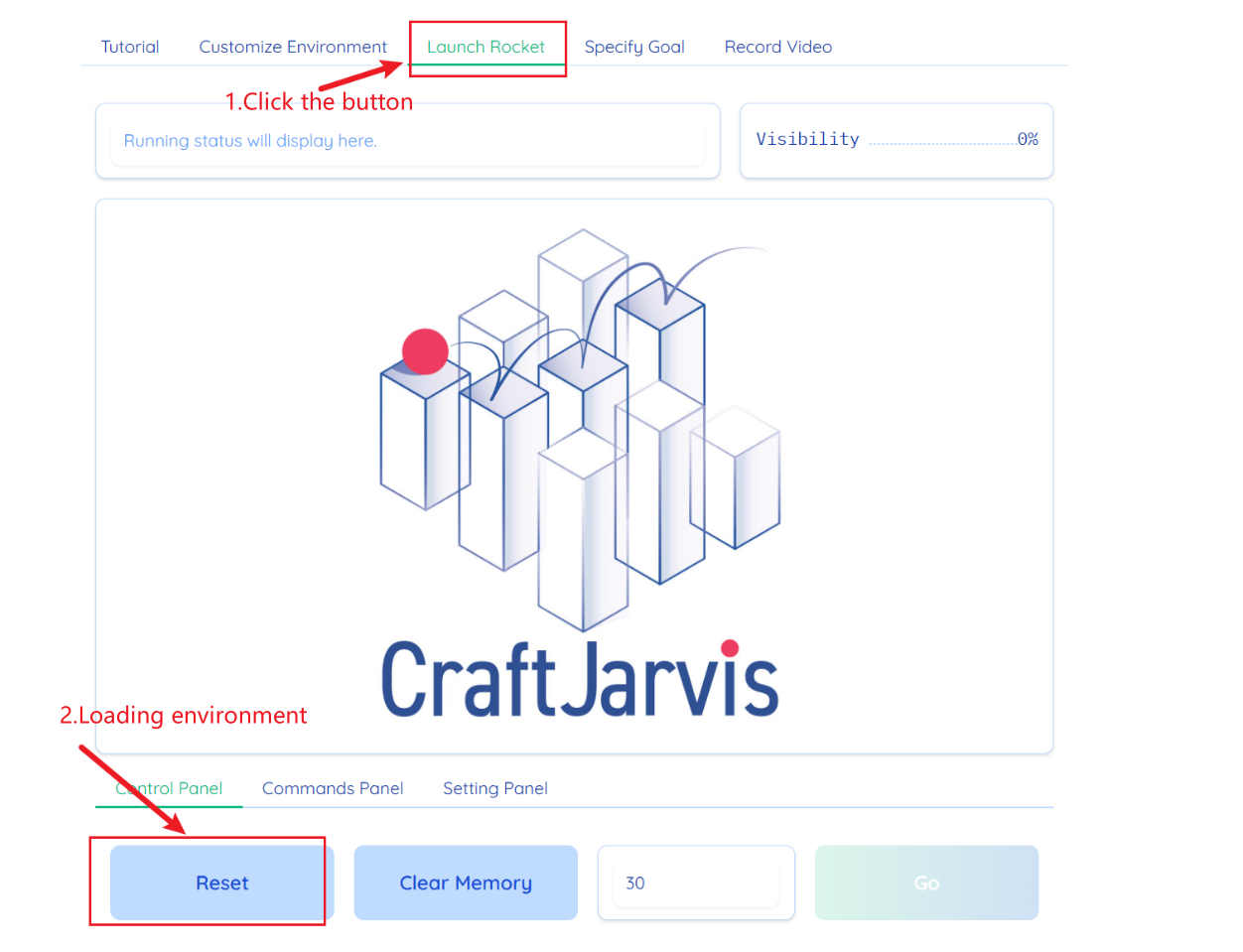
- Launch Rocketのロード環境に入る
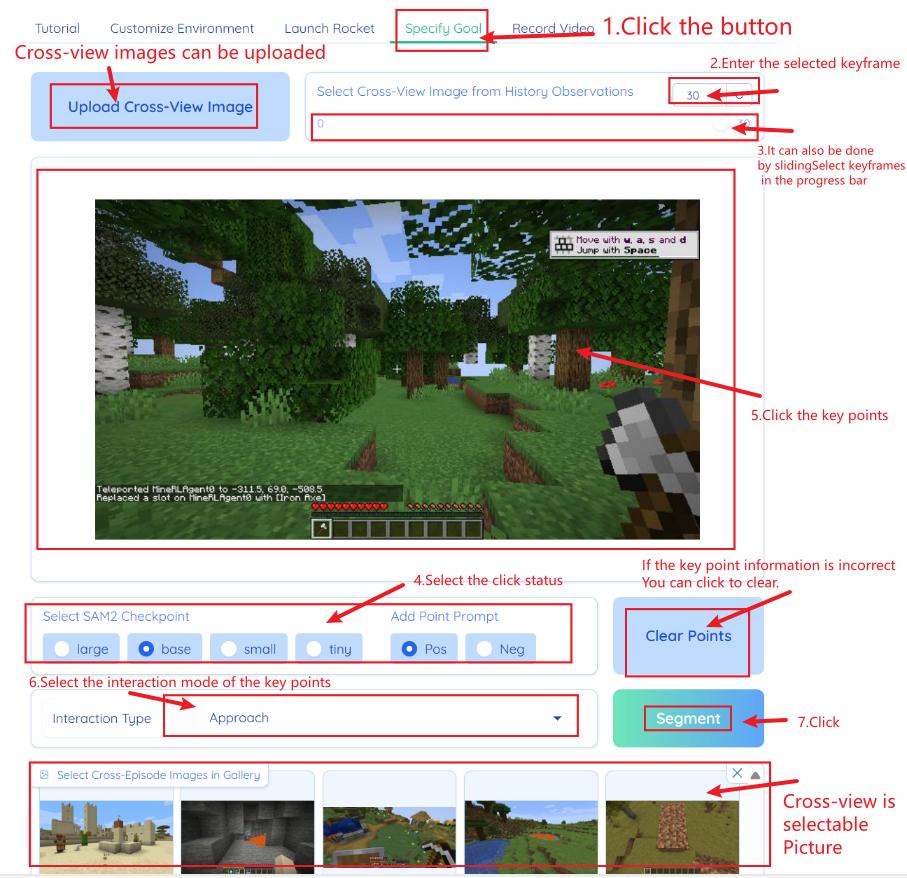
- 目標を指定し、ターゲットポイントとインタラクション方法を選択します
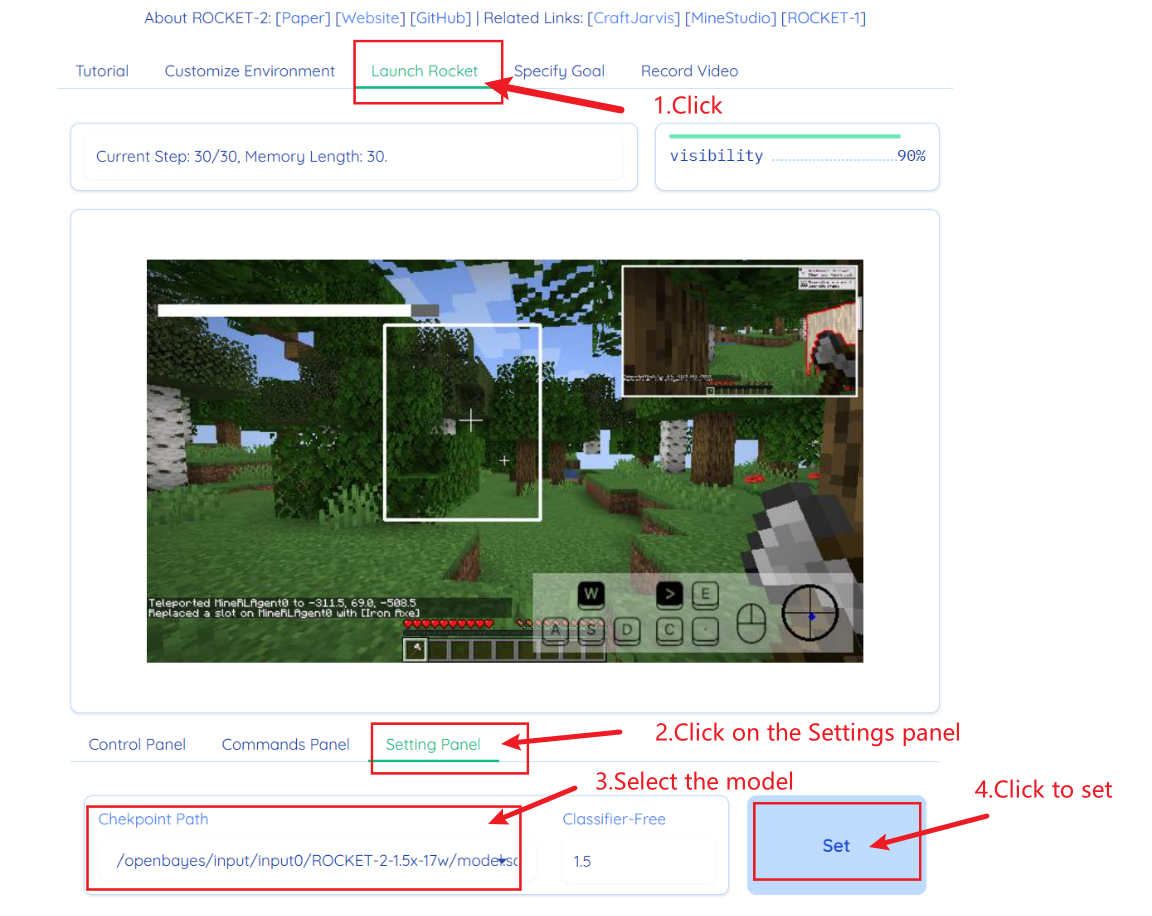
- Launch Rocketの設定パネルに入り、モデルを選択します
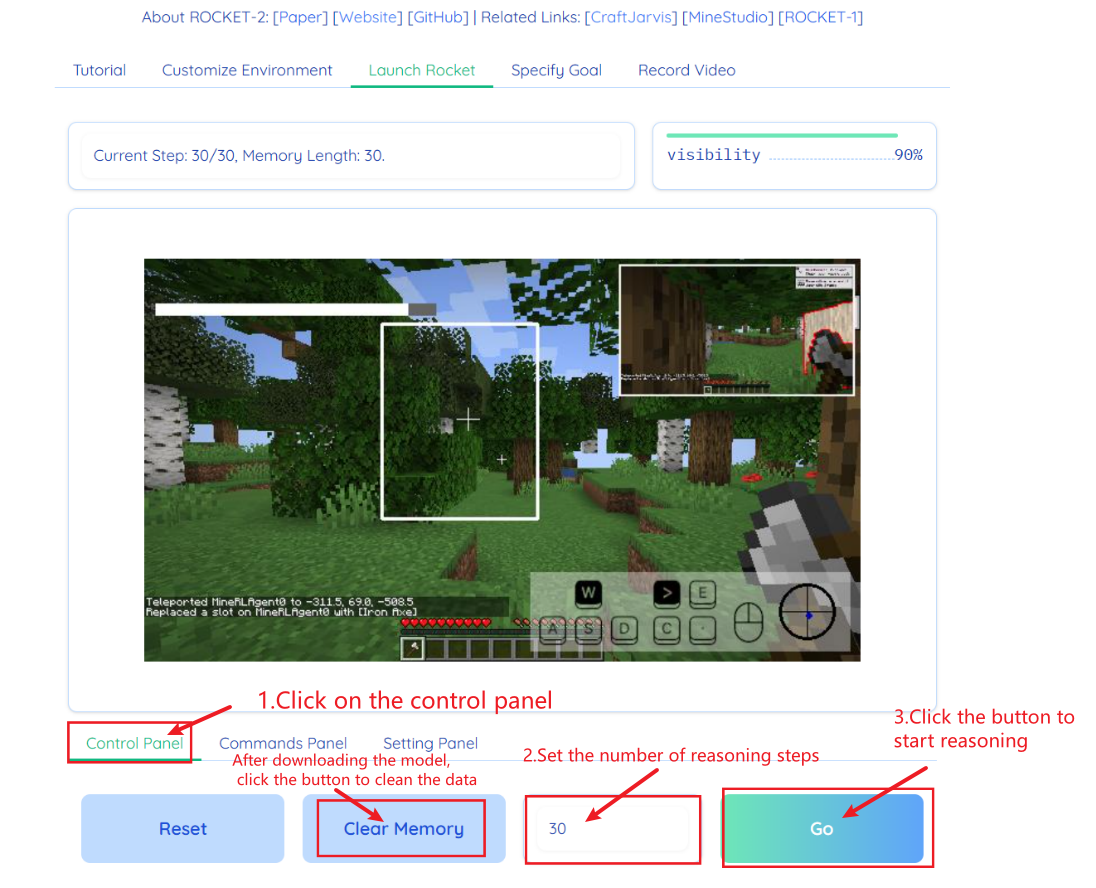
- Launch Rocketのコントロールパネルに入り、推論ステップを設定し、推論を実行します。
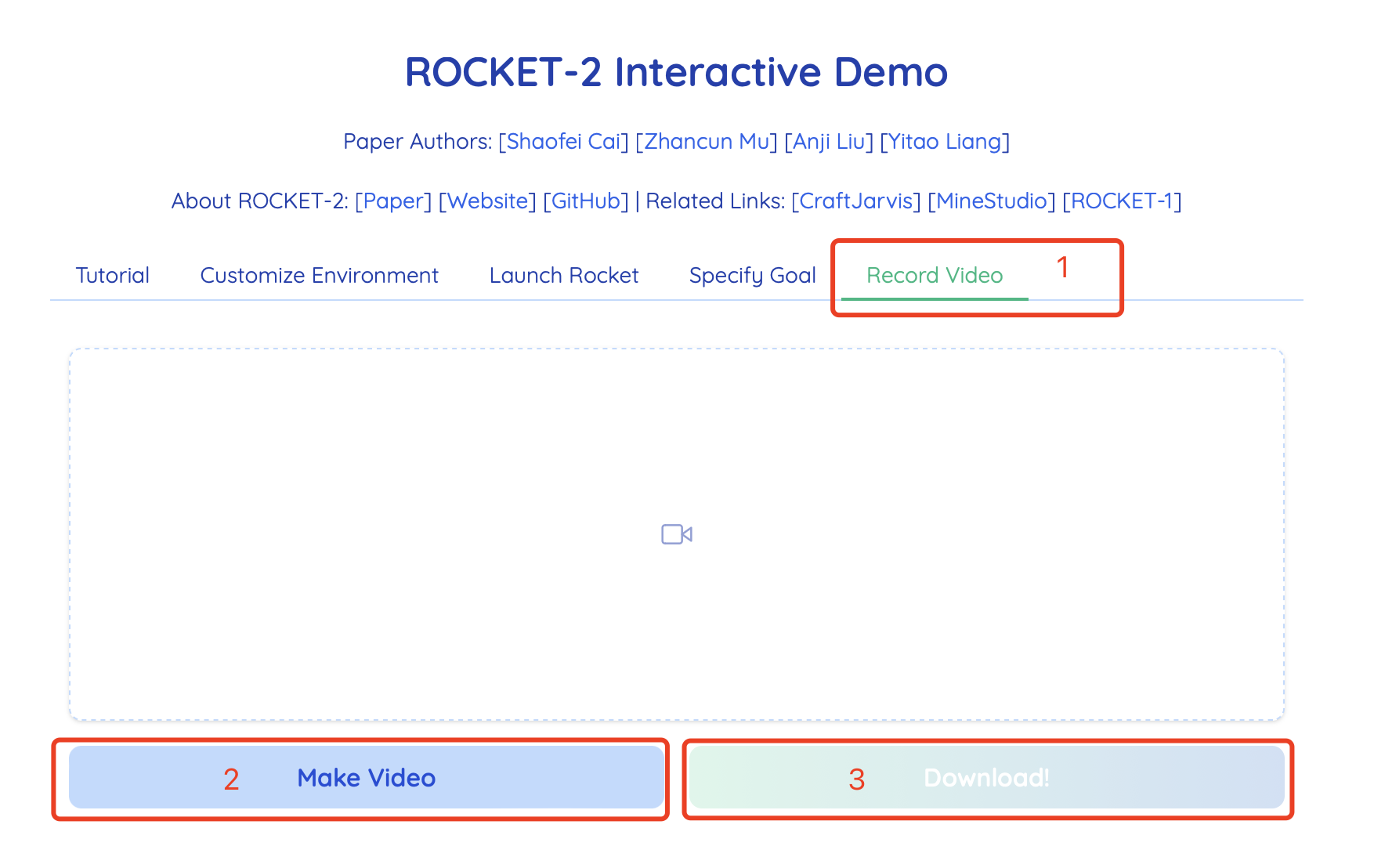
- 推論プロセスが完了するまで手順 4 ~ 6 を繰り返します。次に、ビデオ録画モードに入り、ビデオを作成してダウンロードします。このビデオはオンラインでは利用できません。
引用情報
このプロジェクトの引用情報は次のとおりです。
@article{cai2025rocket,
title={ROCKET-2: Steering Visuomotor Policy via Cross-View Goal Alignment},
author={Cai, Shaofei and Mu, Zhancun and Liu, Anji and Liang, Yitao},
journal={arXiv preprint arXiv:2503.02505},
year={2025}
}
このノートブックはコミュニティユーザーによって提供されたものであり、教育および情報提供のみを目的としています。コンテンツに著作権侵害が含まれる場合は、[email protected]までご連絡ください。速やかに確認し、削除いたします。