Command Palette
Search for a command to run...
オンラインチュートリアル|ヒューマノイドロボット、人間の動作生成、拡散モデルの微調整など、NVIDIAの最新の物理AIモデルを簡単に導入できます。
先日開催されたGTC 2026では、NVIDIAは待望の新型GPUに加え、より具体的で実用的な方向性にも大きな注目を集めた。物理AI。
ジェンセン・ホアン氏が繰り返し言及してきたこの概念は、重要な結論を明らかにしている。すなわち、AIが真に産業変革を推進するインフラとなるのは、単に画面上に存在するだけでなく、物理的な環境を認識し、タスクを理解し、行動を実行できるようになった時である。この概念は、「身体化されたAI」と大きく重なり合っており、AIが単に「動く」だけでなく、複雑な環境において確実に動作すること、つまり現実世界との深い結びつきを強調している。
したがって、主要な技術会議であるGTC 2026では、基本的なヒューマノイドロボットモデルから、高精度な動作生成、そして統一された人体モデリングシステムに至るまで、あらゆるものが議論されていることがわかります。NVIDIAが発表した一連のモデルは、もはやモデル自体の機能だけに焦点を当てるのではなく、「アクション」と「実行」を中心に展開している。
で、3 つのオープンソース プロジェクトは、NVIDIA Isaac GR00T、Kimodo、SOMA-X です。彼らは、意思決定、生成、表現という3つのレベルから同じ問題に取り組んでいる。つまり、機械が複雑な動作をより自然かつ効率的に実行できるようにするにはどうすればよいか、という問題である。
一つはタスクを理解し、それを実行可能な動作に変換する役割を担い、もう一つは詳細かつ現実的な動作軌跡の生成に重点を置き、そして三つ目は断片化された人間モデルという長年の課題を解決し、異なるシステム間のよりスムーズな連携を可能にすることを目指しています。これらの機能はそれぞれ明確な価値を持っていますが、より重要なのは、ロボットを「能動的」なものから「ユーザーフレンドリー」なものへと進化させるという、より実践的な目標に全てが繋がっている点です。
その上、NVIDIAはまた、拡散モデルのトレーニング手法であるFDFOもリリースしました。これは、生成モデル最適化の観点から、上記の機能の基盤となるサポートを提供するものです。
世界中の開発者が、GTC 2026のオープンソースの成果をよりアクセスしやすく安定した環境で迅速に体験できるようにするため、HyperAIのウェブサイト(hyper.ai)は、チュートリアルセクションで以下のオンラインチュートリアルを公開しました。
NVIDIA Isaac GR00T:汎用ヒューマノイドロボットの基本モデル
オンラインで実行:https://go.hyper.ai/2Cjvr
SOMA-X:統一されたパラメトリック人体モデルフレームワーク
オンラインで実行:https://go.hyper.ai/UcEI7
Kimodo:人間とロボットの動作生成モデル
オンラインで実行:https://go.hyper.ai/p99vI
FDFO:有限微分流最適化
オンラインで実行:https://go.hyper.ai/ikihN
HyperAI は新規ユーザーに登録特典を提供しています。わずか $1 で、RTX 5090 のコンピューティング パワーを 20 時間利用できます (元の価格は $7)。リソースは永続的に有効です。
NVIDIA アイザック・GR00T
汎用ヒューマノイドロボット基本モデル
NVIDIA Isaac GR00T N1.6は、汎用ヒューマノイドロボットのスキル学習を目的として設計された、オープンソースのビジョン・言語・アクション(VLA)モデルで、2026年3月にリリースされました。このモデルは、複数の身体部位を組み合わせた設計を採用しており、言語や画像などのマルチモーダル入力を受け取り、多様な環境で操作タスクを実行することが可能です。
GR00T N1.6のニューラルネットワークアーキテクチャは、視覚言語基盤モデルと拡散トランスフォーマーヘッドを組み合わせたもので、連続的なモーションノイズ除去を実現します。このモデルは、双腕ロボット、半人型ロボット、大型人型ロボットなど、多様なロボットデータを用いて学習されており、様々なロボットの形状、タスク、環境に適応できるよう、事後学習も可能です。
オンラインで実行:https://go.hyper.ai/2Cjvr

SOMA-X:統一されたパラメトリック人体モデルフレームワーク
スキン付きマルチパーソンリニア(SMPL)、SMPL-X、マルチタスクヒューマン表現(MHR)、Anny、GarmentMeasurementsなどのパラメトリック人体モデルは、人体再構築、アニメーション、シミュレーションなどの分野で広く使用されています。
しかしながら、これらのモデルは根本的なレベルで互換性に問題を抱えています。各モデルは独自のメッシュトポロジー、ジョイント階層、およびパラメータ化方法を定義しているため、シームレスな統合は不可能です。したがって、異なるモデルの利点を組み合わせる必要がある場合(例えば、あるモデルの年齢制御機能と別のモデルのモーションデータを組み合わせる場合)、多くの場合、モデルペアごとに個別のアダプタを開発する必要があります。これは開発コストを増加させるだけでなく、システムの相互運用性と実用性を著しく制限します。
こうした背景のもと、NVIDIA Labsはパラメトリック人体モデル間の互換性問題を解決するためにSOMA-Xをリリースしました。SOMA-Xは、標準化された人体トポロジーとスケルトンリギングシステムを、サポートされているすべてのパラメトリック人体モデルの共通ハブとして提供します。既存のモデルを置き換えるのではなく、各モデルの静的形状を共有表現にマッピングすることで統一性を実現します。このアプローチにより、カスタムアダプタやモデル固有のリダイレクトを必要とせずに、サポートされているあらゆるアイデンティティモデルを統一されたアニメーションパイプライン内で駆動できるため、システムの汎用性と拡張性が大幅に向上します。
オンラインで実行:https://go.hyper.ai/UcEI7
Kimodo:人間とロボットの動作生成モデル
Kimodoは、NVIDIA Researchが2026年3月にリリースした運動学的モーション拡散モデルです。700時間にも及ぶ大規模な市販の光学式モーションキャプチャデータセットで学習されたこのモデルは、高品質な人間およびヒューマノイドロボットの動きを生成し、テキストプロンプトや、全身の姿勢キーフレーム、エンドエフェクタの位置/回転、2Dパス、2Dウェイポイントなどの豊富な運動学的制約によって制御できます。
Kimodoは、以下の複数の骨格タイプをサポートしています。
* SOMA:人間の骨格、30個の関節
* Unitree G1:34個の関節を持つ人型ロボットの骨格
* SMPL-X:22個の関節を持つパラメトリック人体モデル。
このモデルは拡散アーキテクチャを採用しており、テキストエンコーダとモーション制約メカニズムを組み合わせることで、自然言語による説明とキーフレーム制約に基づいて、滑らかで自然なモーションシーケンスを生成することを可能にする。
オンラインで実行:https://go.hyper.ai/p99vI
FDFO:有限微分流最適化
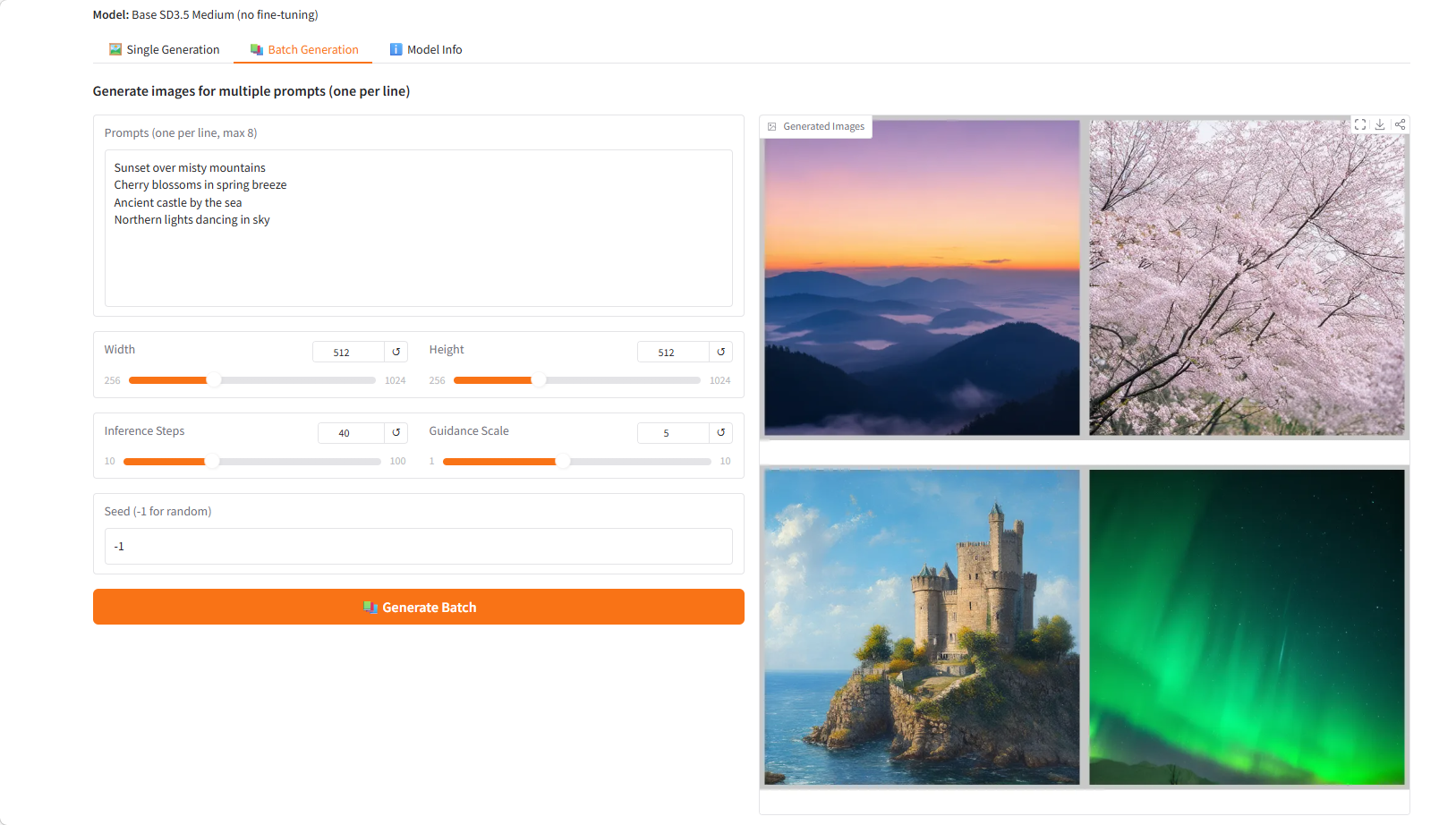
FDFO(Finite Difference Flow Optimization)は、有限差分勾配推定に基づくストリーミング拡散モデルの微調整手法で、NVIDIAが2026年3月にリリースしました。この手法は、強化学習後のVisual Language Model(VLM)スコアやPickScoresからの報酬信号を用いて、Stable Diffusion 3.5 Mediumでモデルをトレーニングすることで、モデルの生成品質を最適化します。
FDFOは、有限差分法による効率的かつ安定した勾配計算を実現することで、従来の拡散モデルの微調整における勾配推定問題を解決します。この手法は、モデル本来の機能を維持しながら、生成された画像とテキストプロンプト間の整合性、美的品質、およびリアリズムを大幅に向上させます。
オンラインで実行:https://go.hyper.ai/ikihN