HyperAI
Command Palette
Search for a command to run...
ROCKET-2:3D 游戏零样本迁移
一、教程简介

ROCKET-2 是由 CraftJarvis 团队于 2025 年 3 月 21 日推出的跨视图目标对齐的视觉运动控制框架。专注于解决机器人领域中的复杂任务控制问题。该项目通过创新的多视角目标对齐技术,显著提升了视觉运动策略(Visuomotor Policy)在动态环境中的泛化能力与可控性。相关论文成果为 ROCKET-2: Steering Visuomotor Policy via Cross-View Goal Alignment 。
本教程采用资源为单卡 RTX 5090 。
二、项目示例

三、运行步骤
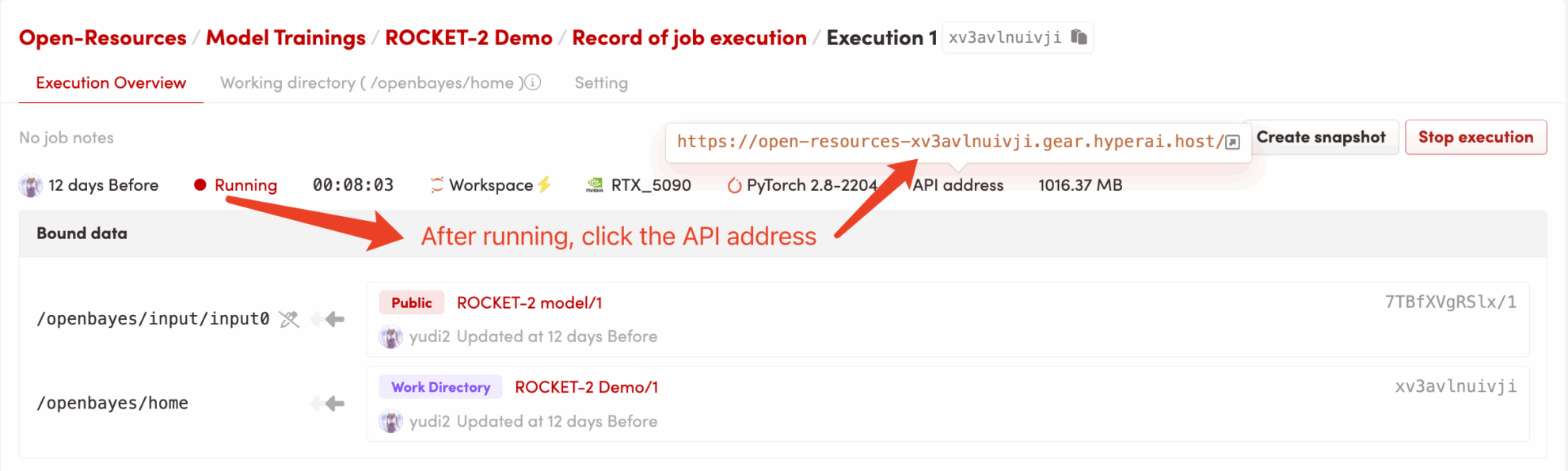
1. 启动容器后点击 API 地址即可进入 Web 界面
若显示「Bad Gateway」,这表示模型正在初始化,由于模型较大,请等待约 1-2 分钟后刷新页面。
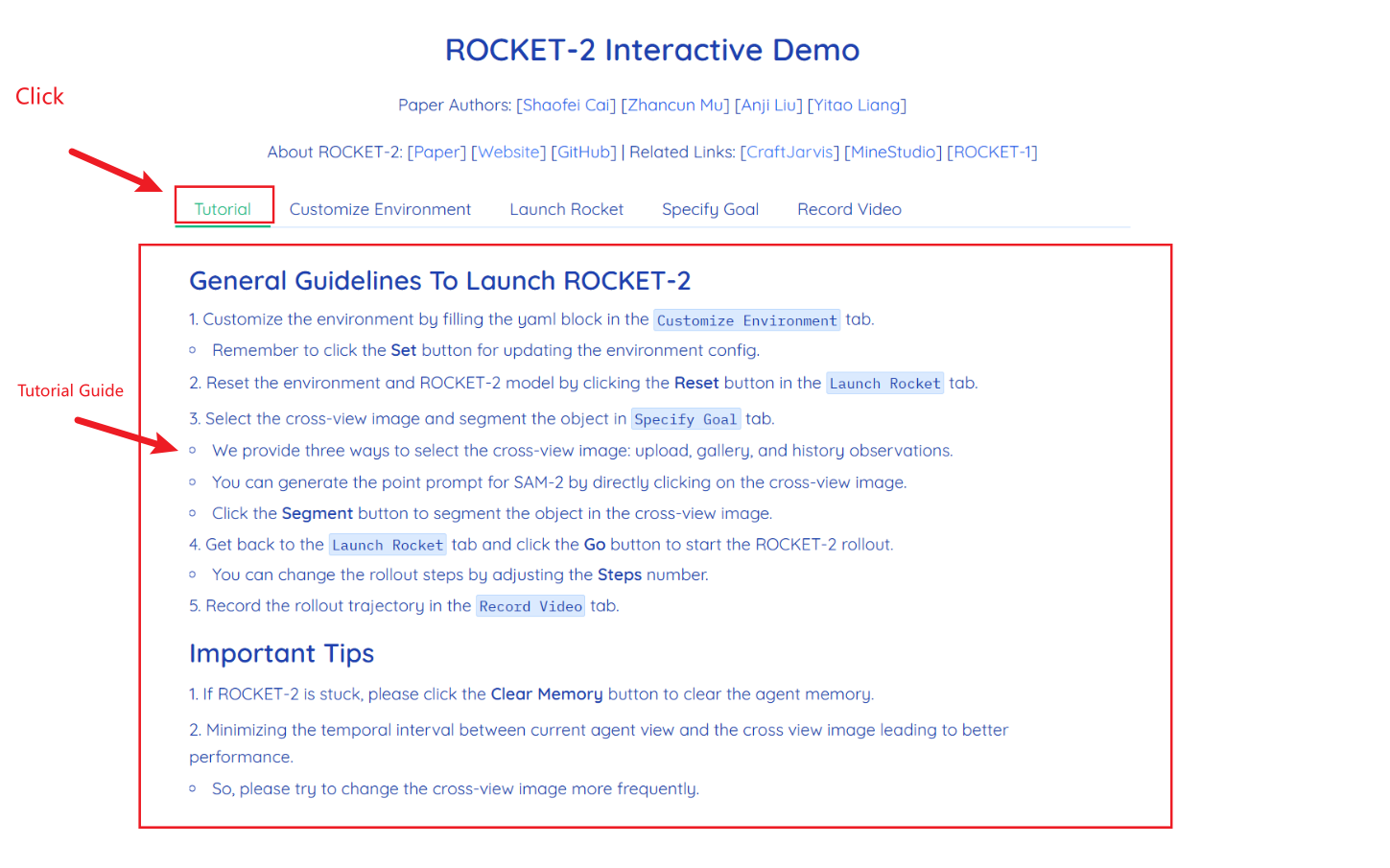
2. 进入网页后,即可与模型展开对话
使用步骤
- 进入 Tutorial 查看教程指南
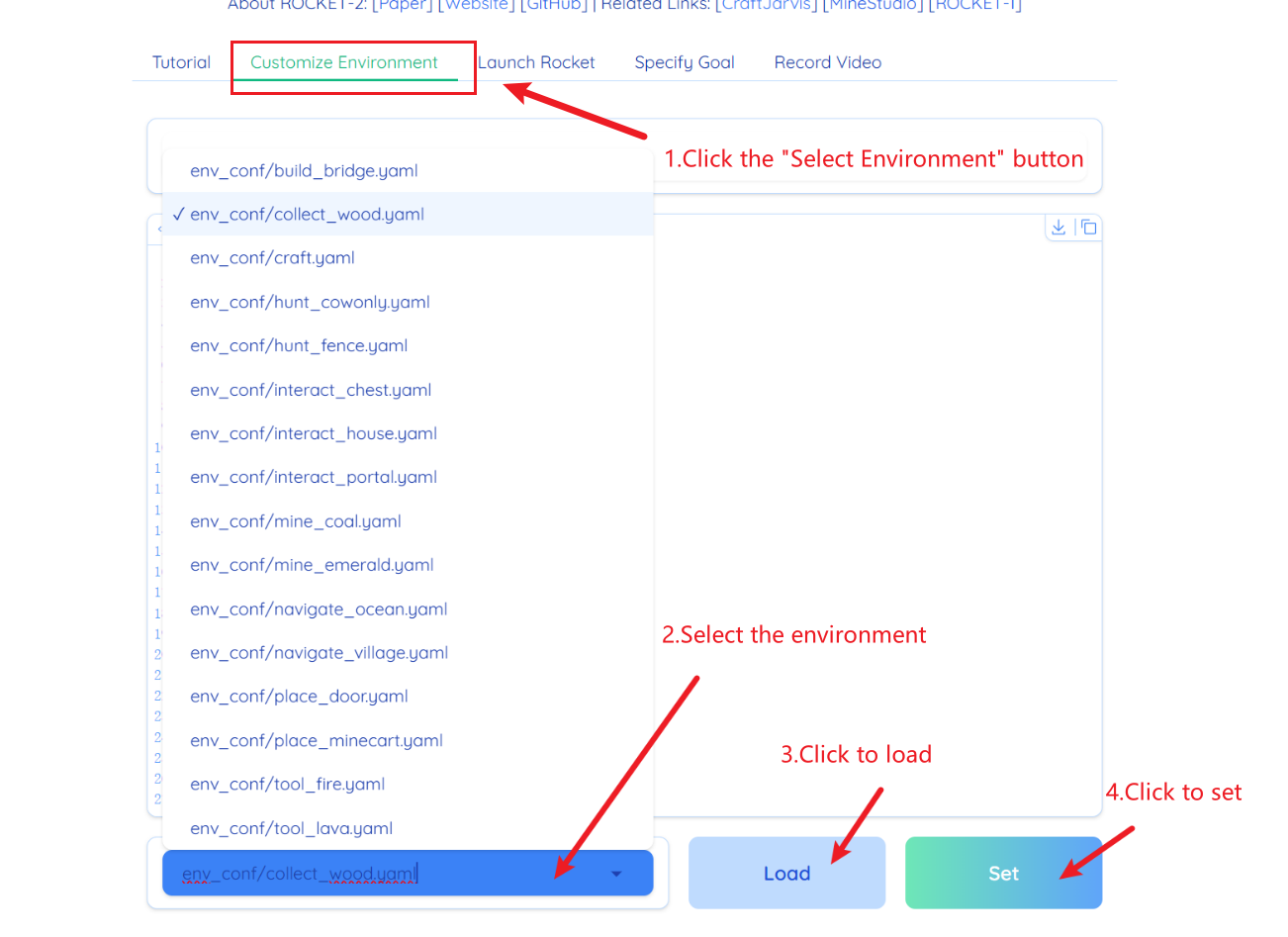
- 进入 Customize Environment 选择你要加载的环境
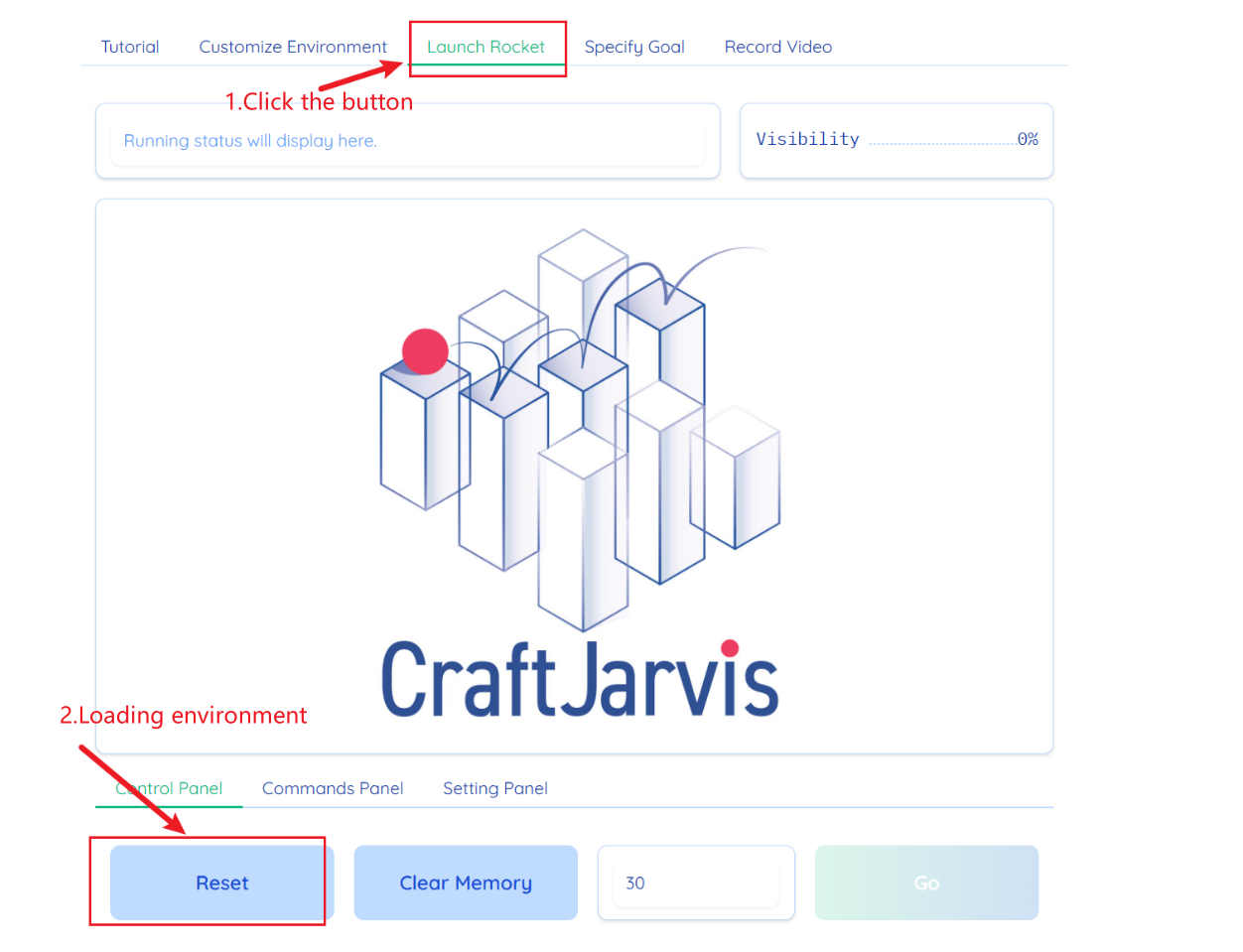
- 进入 Launch Rocket 加载环境
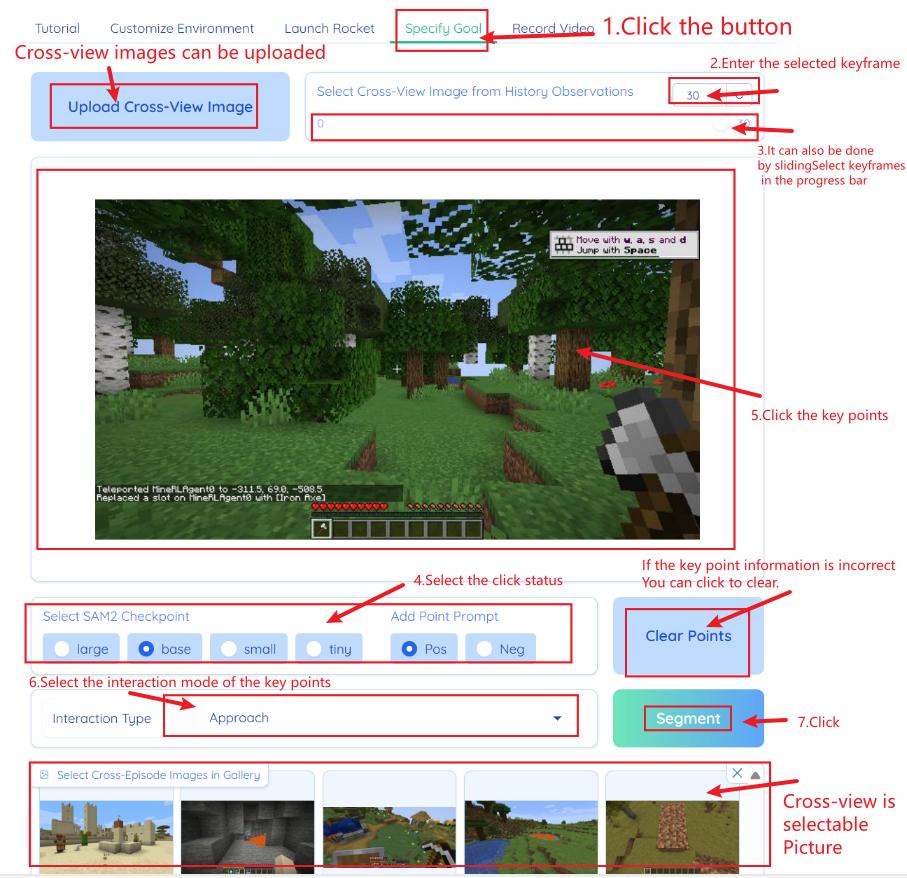
- 进入 Specify Goal 选择目标点位和交互方式
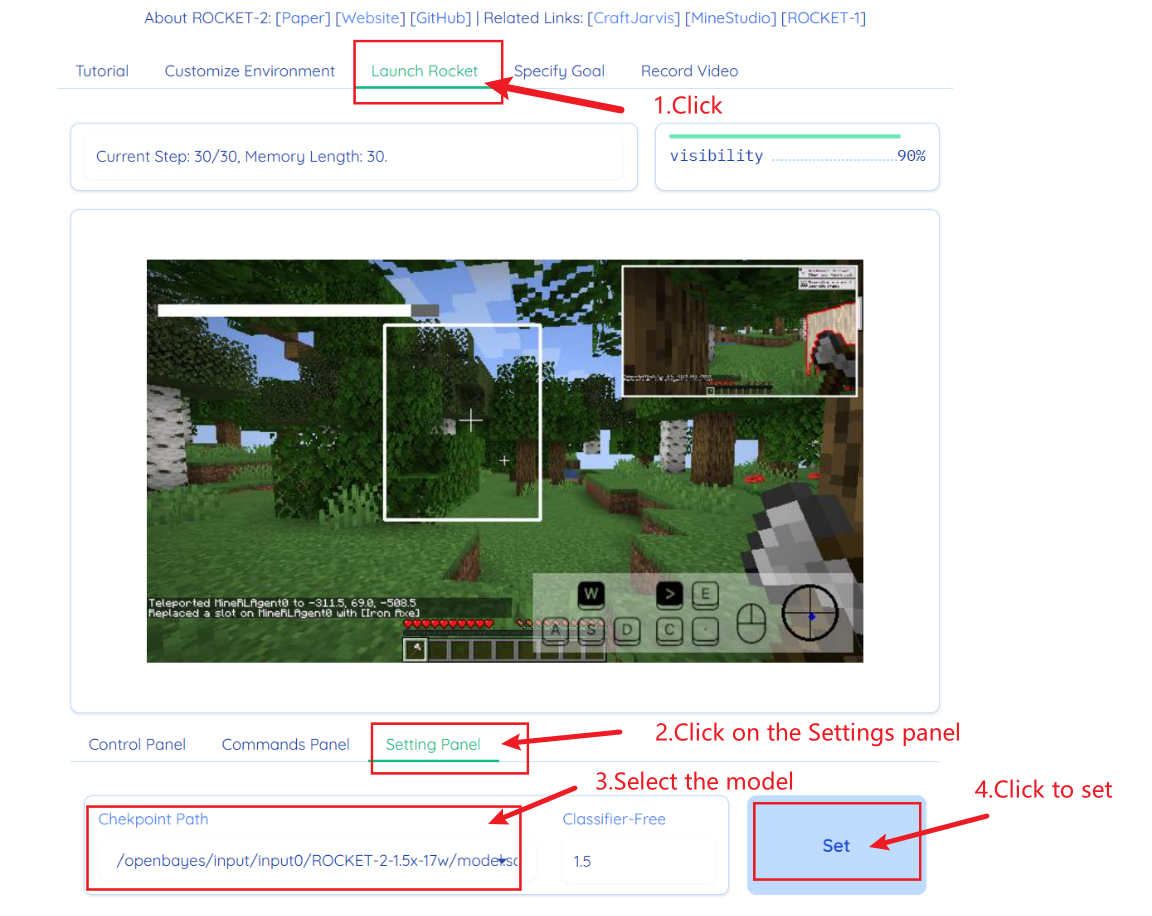
- 进入 Launch Rocket 的 Setting Panel 选择模型
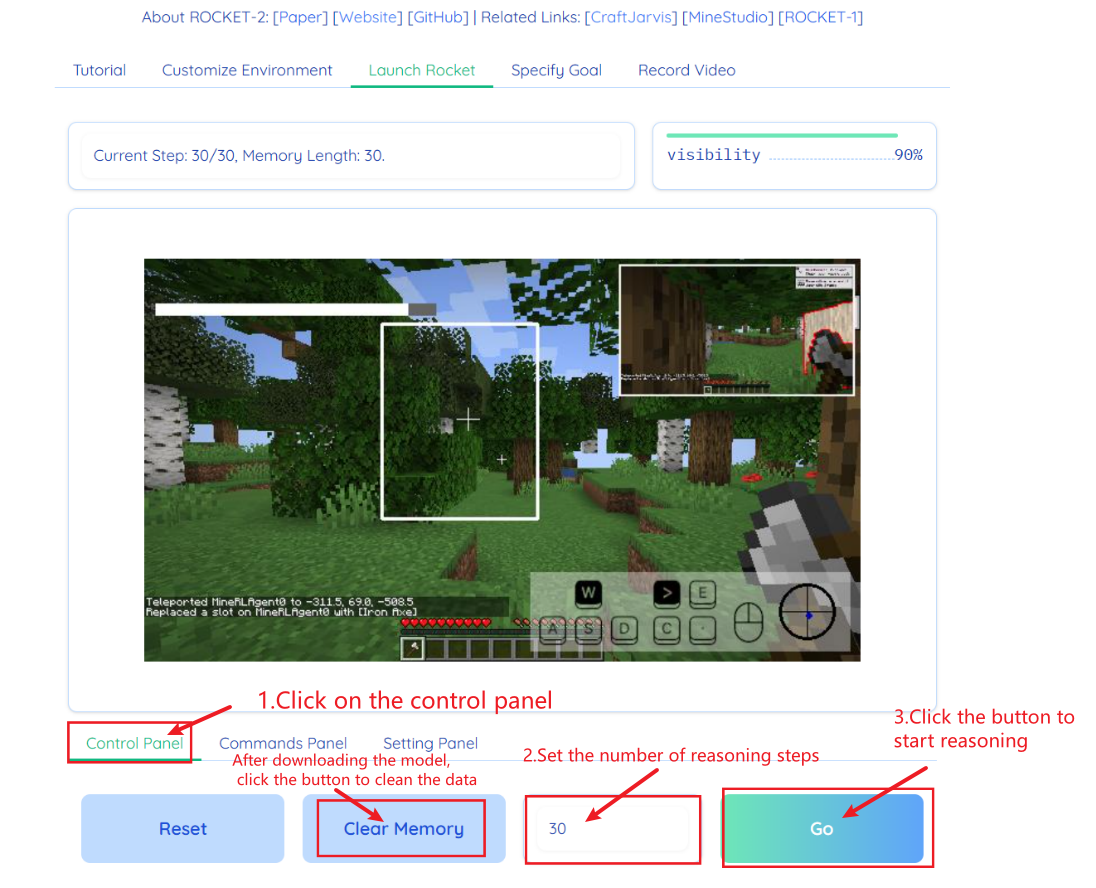
- 进入 Launch Rocket 的 Control Panel 设置推理步骤并进行推理
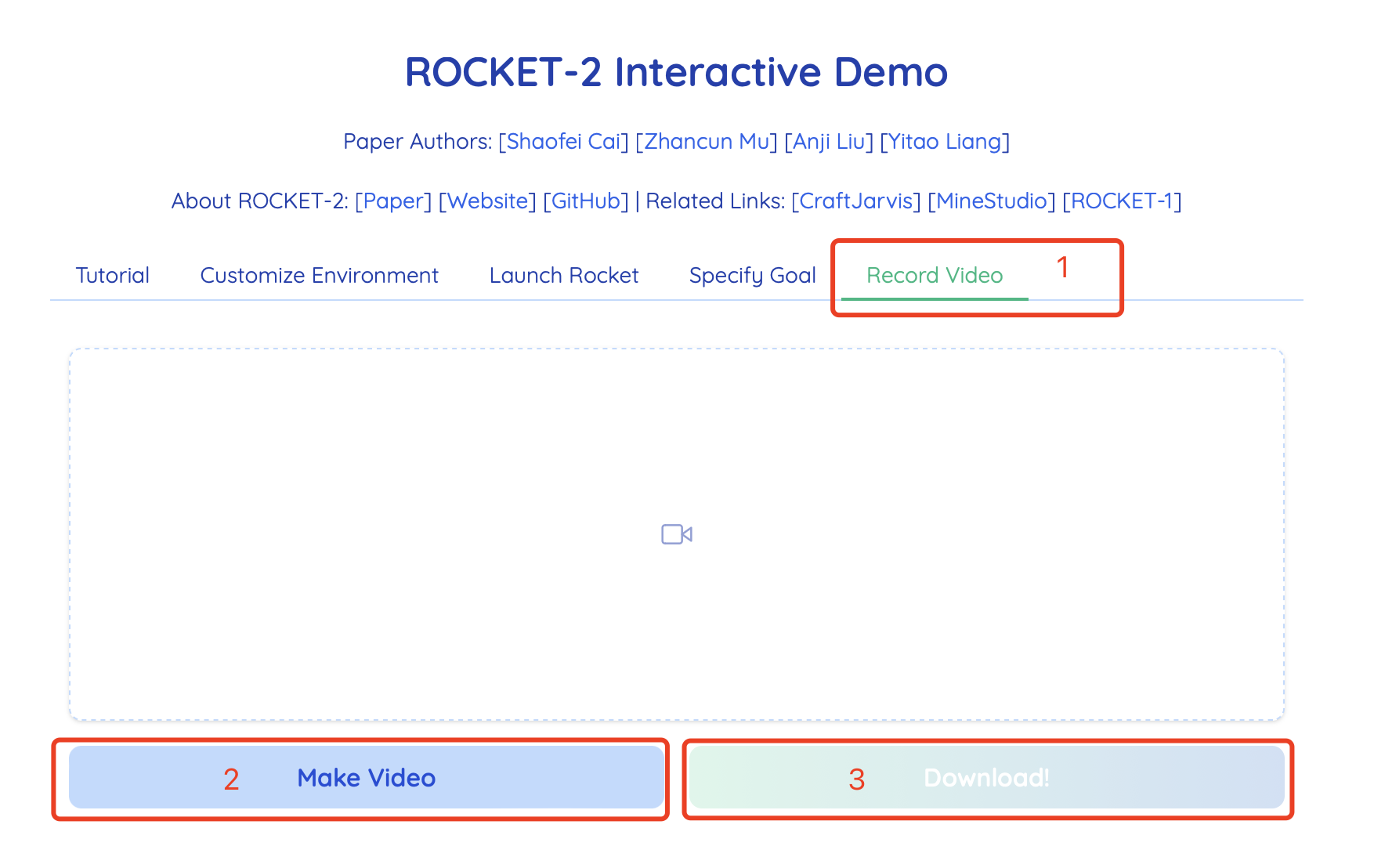
- 将步骤 4-6 重复执行,直至推理过程完成。随后,进入 Record Video 模式创建并下载视频。该视频无法在线播放。
引用信息
本项目引用信息如下:
@article{cai2025rocket,
title={ROCKET-2: Steering Visuomotor Policy via Cross-View Goal Alignment},
author={Cai, Shaofei and Mu, Zhancun and Liu, Anji and Liang, Yitao},
journal={arXiv preprint arXiv:2503.02505},
year={2025}
}
本笔记本由社区用户贡献,仅用于教育和信息传播目的。如果任何内容涉及版权侵权,请通过 [email protected] 联系我们,我们将及时审核并删除。