HyperAI
Command Palette
Search for a command to run...
TUM RGB-D 同步定位与地图构建数据集
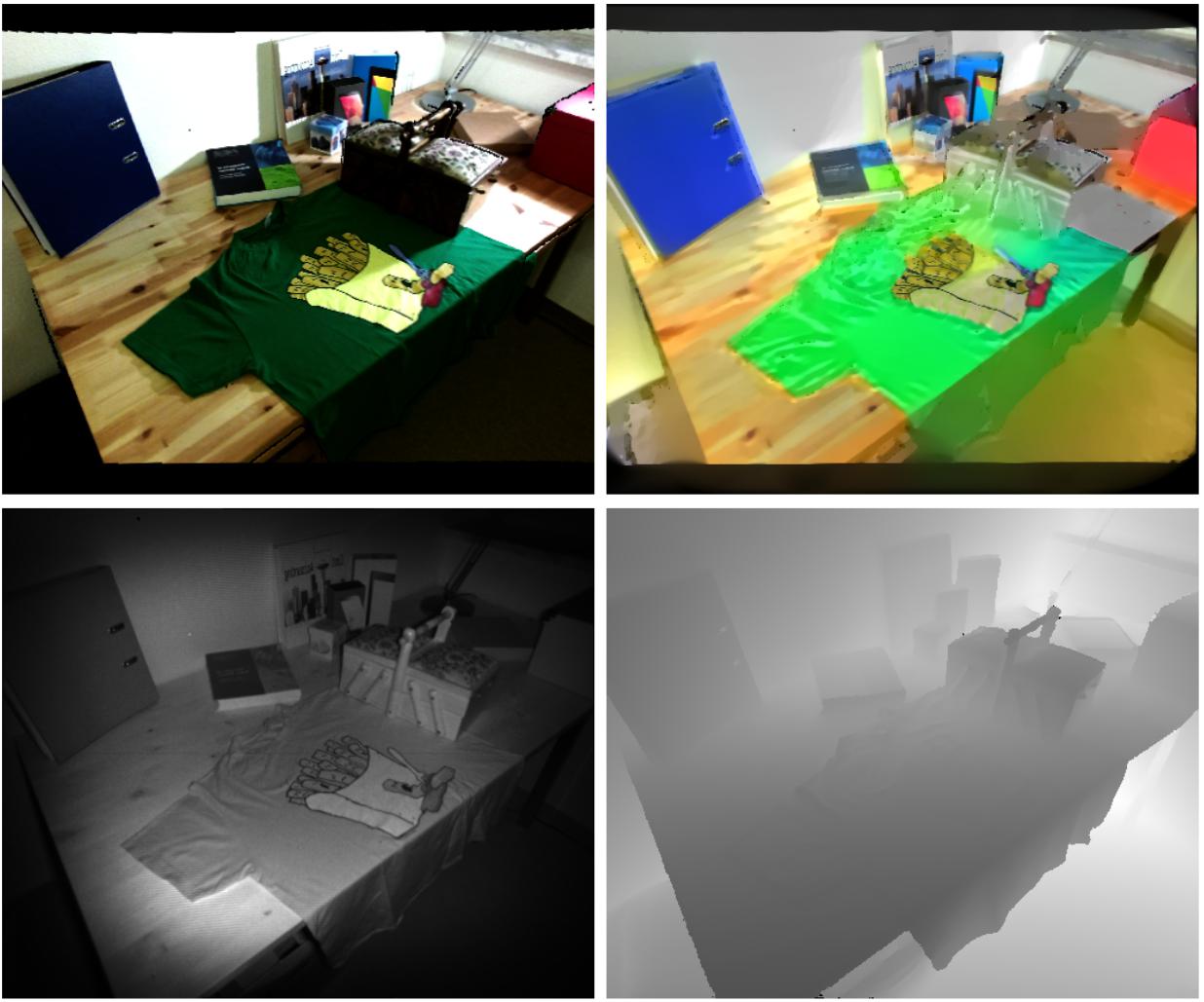
TUM RGB-D 是一个 RGB-D 数据集,包含了微软 Kinect 传感器沿着传感器的 ground truth 轨迹记录的彩色和深度图像。数据基于全帧率(30 Hz)和传感器分辨率(640 x 480 像素)记录。地面真实轨迹是由一个带有八个高速跟踪相机(100 Hz)的高精度运动捕捉系统获得的。 该数据集由在不同的室内场景使用 Microsoft Kinect 传感器记录的 39 个序列组成,包含了 Testing and Debugging(测试),Handheld SLAM(手持 SLAM),Robot SLAM(机器人 SLAM),Structure vs. Texture(结构 vs 低纹理),Dynamic Objects(动态物体),3D Object Reconstruction(三维物体重建),Validation Files(验证集),Calibration Files(标定文件)几种针对不同任务的数据集。每个种类包含多个数据,可以用于多种任务的性能测试。
此数据集由社区用户贡献,仅用于教育和信息目的。如有任何内容涉及版权侵权,请通过 [email protected] 联系我们,我们将及时审核并删除。