Command Palette
Search for a command to run...
A Groundbreaking Breakthrough in Machine Learning for Physics Information! A Novel GNN Architecture Enables Accurate Predictions of Complex Multibody Dynamic Systems, Empowering Robotics, Aerospace, and Materials science.

In recent years, artificial intelligence has made great breakthroughs in fields such as image recognition and natural language processing, but it still faces many challenges in modeling complex physical systems. Many real-world problems—such as the motion of particulate materials, molecular dynamics, human motion, and mechanical system simulation—belong to the category of multibody dynamics systems. These systems typically have highly complex interactions and must strictly obey fundamental physical laws, such as the conservation of momentum and energy.
Traditional numerical simulation methods can accurately describe these systems, but they are often computationally expensive, especially when long-term simulations or large-scale particle systems are required, where computational resources are consumed in huge quantities.At the same time, while machine learning models can learn complex relationships from data, they often lack constraints on physical laws, leading to error accumulation or even system divergence in long-term predictions.
Against this backdrop, machine learning based on physical information has gradually become a research hotspot.Dynamic modeling methods based on Graph Neural Networks (GNNs) have received widespread attention in recent years. Generative Neural Networks (GNNs) can naturally represent interactions between particles or rigid bodies: nodes represent objects, and edges represent interactions. Therefore, they are well-suited for simulating multi-body systems. However, data-driven methods such as GNNs often lack physical consistency, interpretability, and generalization ability.
To solve this problem,Researchers from the Swiss Federal Institute of Technology in Lausanne (EPFL) have proposed a novel physics-driven GNN architecture, DYNAMI-CAL GraphNet, which combines the learning capabilities of GNNs with physics-based inductive biases. By directly embedding the laws of conservation of linear momentum and angular momentum into the model structure, these two conservations are explicitly guaranteed.
Experimental results demonstrate that DYNAMI-CAL GRAPHNET offers significant advantages in fields requiring accurate, interpretable, and real-time modeling of complex multibody dynamical systems, such as robotics, aerospace engineering, and materials science. By providing physically consistent and scalable prediction capabilities that comply with fundamental conservation laws, this method can infer forces and torques in systems while efficiently handling heterogeneous interactions and external forces.
The related research findings, titled "A physics-informed graph neural network conserving linear and angular momentum for dynamical systems," have been published in Nature Communications.
Research highlights:
* In the isovariant GNN architecture, DYNAMI-CAL GRAPHNET directly incorporates the conservation of linear momentum and angular momentum into the network structure by enforcing Newton's third law at the level of internal pairwise interactions.
This method provides physically consistent predictions even in complex non-central interactions and dissipative effects, and is applicable to a variety of systems.
This architecture has significant value in control system design, mechanical process optimization, and dynamic behavior analysis of natural and engineering systems.
Paper address:
https://www.nature.com/articles/s41467-025-67802-5
Follow our official WeChat account and reply "Physics GNN" in the background to get the full PDF.
Four distinct types of dynamic system datasets
To verify the model's generality, the research team conducted experiments on four distinct datasets of dynamic systems.These datasets cover a variety of scenarios, ranging from physical simulations to real-world data. Among them:
Particle 6-DoF Collision Dataset
The research team constructed a six-DOF particle collision system. In this system, each particle can not only translate but also rotate, thus possessing six degrees of freedom (6-DoF).
The training dataset consists of 5 trajectories, each containing 60 identical spheres.These spheres are confined to a rectangular closed space. Initial linear velocities are randomly assigned and uniformly sampled within the range of 1–2 m/s. Each trajectory contains 1500 time steps with a data sampling interval of 10⁻⁴ seconds, while the time step of the underlying physical simulation is 10⁻⁶ seconds. At each time step, the following state information for each sphere is recorded: position, linear velocity, and angular velocity.
The validation set contains one trajectory that was not used in training. The system also consists of 60 spheres and 200 time steps.Its initial velocity magnitude is still within the training range, but the velocity direction is different from the training data, which is used to test the model's generalization ability.
The interpolation test set is set up the same as the validation set, but the trajectory length is 500 time steps.Used to evaluate the model's long-term predictive ability within the training distribution range.
Constrained N-body system
For classic constrained N-body dynamics problems, in order to evaluate the applicability of the model in mixed interaction types and structurally constrained systems,The researchers used the Constrained N-Body dataset proposed in the literature.This dataset extends the three-dimensional charged particle simulation proposed by Thomas Kipf et al. by introducing complete constraints in the form of rigid sticks and hinges to construct the system.
Human motion capture data
The third dataset comes from real-world human motion data from the CMU Motion Capture Database.This dataset records the three-dimensional positional changes of human skeletal joints during movement, such as walking, running, and jumping. In the experiment, researchers selected the "walking" data of one subject and modeled the human skeletal joints as a graph structure, where nodes represent joints and edges represent bone connections. This experiment was primarily used to validate the model's performance in real-world complex motion systems.
Protein Molecular Dynamics
The last dataset comes from protein molecular dynamics simulations.Researchers used the apo adenosine kinase (AdK) equilibrium trajectory dataset, acquired via the MDAnalysis toolkit, which records the atomic-level motion of proteins in an environment of explicit water molecules and ions.
DYNAMI-CAL GraphNet: A Novel Physically Information-Driven GNN Architecture
The core idea of DYNAMI-CAL GraphNet is to directly embed physical conservation laws into the neural network structure. Its overall architecture is shown in the figure below.It can be divided into three key stages:
① Diagram representation;
② A scalarization-vectorization scheme with conservation of linear momentum and angular momentum;
③ Spatiotemporal message transmission.
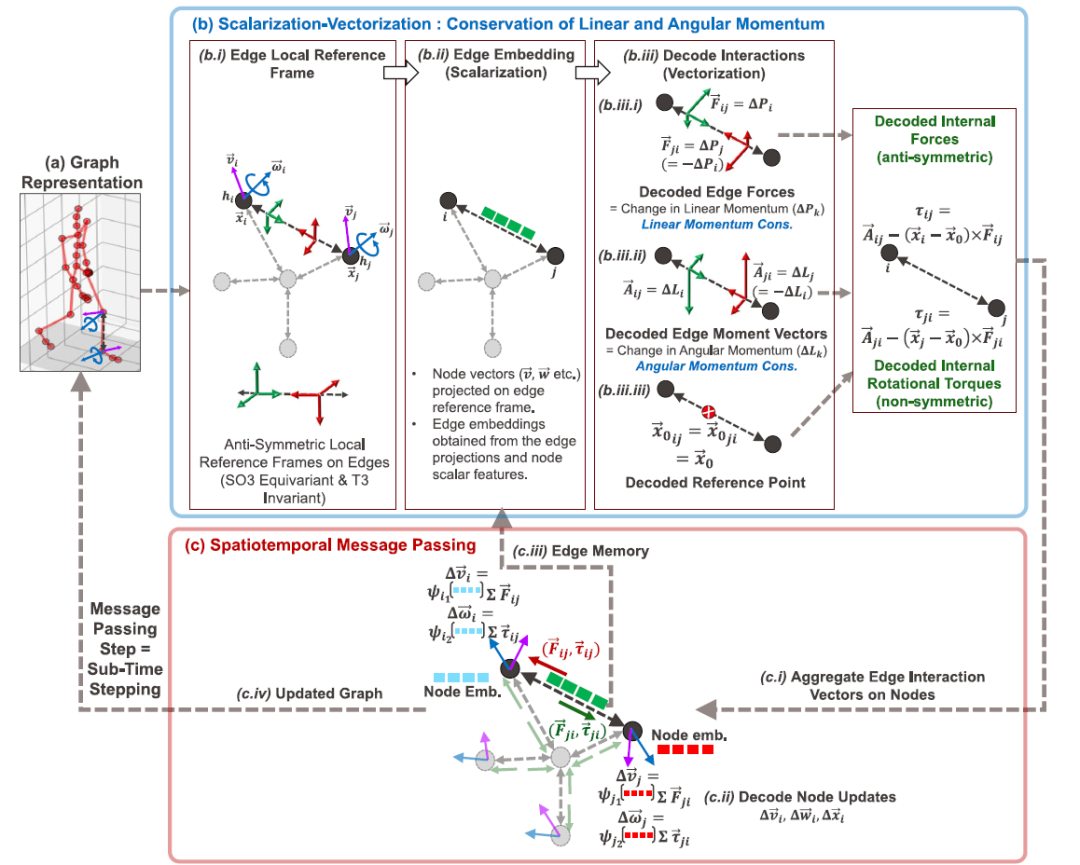
Phase 1: Graph Representation
First, the researchers represented the multibody system as a graph: nodes represent objects or particles, and edges represent interactions between objects.Each node contains multiple features, such as position, velocity, angular velocity, and object properties (mass, charge, etc.); while edges represent the relative positions and interaction relationships between two objects.
Second stage: Scalarization-Vectorization
* Scalarization
During the scalarization phase, the model converts the vector information of nodes and edges into high-dimensional scalar embeddings. A key innovation is that each edge is assigned a local orthogonal reference coordinate system with properties including: isovariance to 3D rotation SO(3), invariance to translation T(3), and antisymmetry when nodes are swapped. In practical applications, this means that when the edge direction is reversed, the signs of the three basis vectors will change, thus ensuring that all subsequent projections and interaction calculations satisfy antisymmetry.
In the scalarization step, node vector features (such as velocity and angular velocity) are projected onto the local coordinate system of these edges to obtain scalar components. These scalars are then combined with other node scalar features to form edge embeddings that are insensitive to node order.This method encodes both directional and scalar information about local interactions while maintaining system symmetry.
* Vectorization
During the vectorization phase, the model decodes the internal forces and rotational torques from the edge embedding vectors. These forces are then aggregated onto the nodes to update the linear velocity, angular velocity, and position of the particles.Because the model design mandates that forces and moments satisfy antisymmetry, the system naturally satisfies the conservation of linear momentum and angular momentum.
Phase 3: Spatiotemporal Message Passing
After calculating the physically consistent internal forces and moments on each edgeThe model will execute the spatiotemporal message passing mechanism of DYNAMI-CAL GRAPHNET.
First, the decoded edge-level internal forces and rotational torques are aggregated on the connecting nodes to obtain the resultant force and resultant torque on each node. Then, these vectors are multiplied by coefficients obtained by node scalar embedding to update the linear velocity and angular velocity of the nodes. Next, the updated position is calculated using implicit Euler integrals. This process constitutes a message passing layer of DYNAMI-CAL GRAPHNET.
In the next round of edge encoding, this progressively evolving representation is preserved as the latent memory of each edge, thus enabling the model to achieve true spatiotemporal reasoning.
This design enables DYNAMI-CAL GRAPHNET to capture the dynamic behavior of a system across multiple time scales while maintaining a physically-based inductive bias at each computational step.
Experimental conclusion: Stability and generalization ability are significantly improved.
Researchers evaluated the performance of DYNAMI-CAL GraphNet on four benchmark tasks, covering both simulated and real-world physical systems. Experiments on multiple datasets demonstrate that DYNAMI-CAL GraphNet outperforms existing methods on several metrics.
Granular 6-DoF collision benchmark
A rolling prediction experiment was conducted on 6-DOF motions of 60 spheres in a cuboid container. The figure below shows a comparison between DYNAMI-CAL GRAPHNET and GNS:
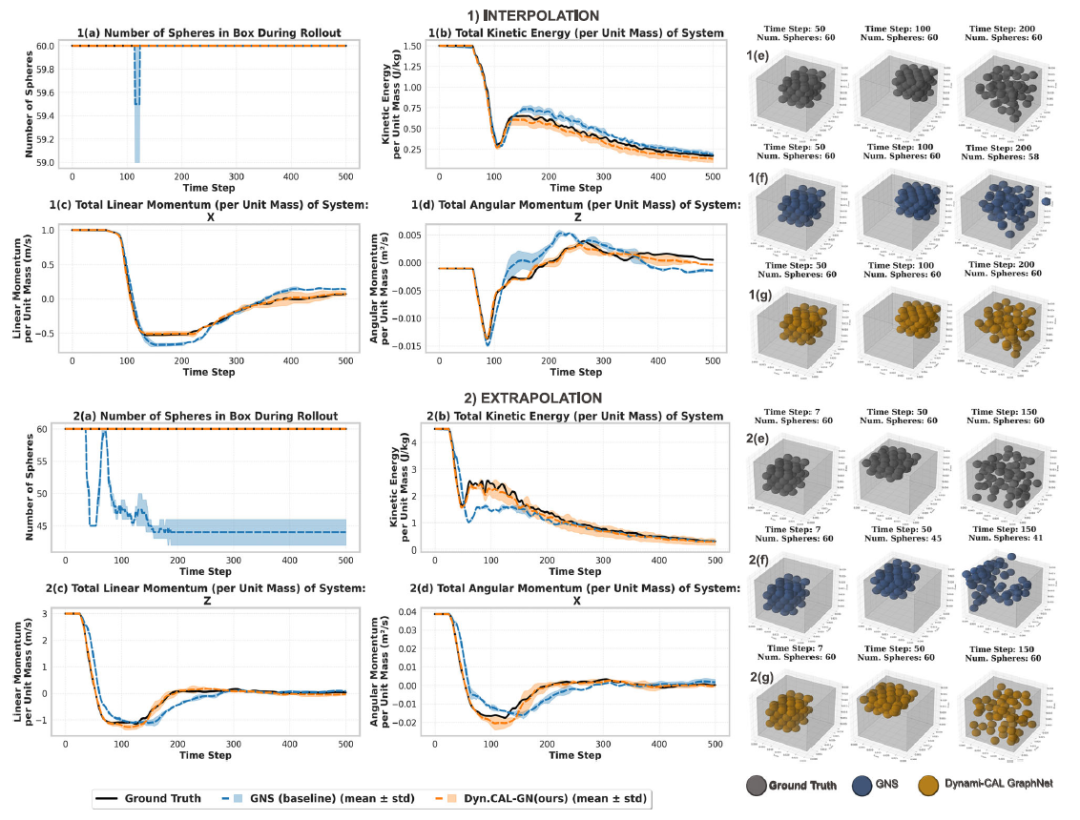
DYNAMI-CAL GRAPHNET successfully preserved all particles, accurately tracked kinetic energy decay, maintained consistent momentum evolution over 500 prediction steps, and exhibited minimal variance across different random seeds.In contrast, GNS diverges earlier in extrapolation scenarios and exhibits particle escape. This is because under high momentum conditions, collision velocities increase, requiring accurate calculation of impulse contact forces to maintain system constraints. GNS fails to generalize well, and even for particles that do not escape, its predictions gradually deviate from the actual physical behavior.
These results indicate that:DYNAMI-CAL GRAPHNET exhibits greater robustness and generalization ability in modeling dissipative, contact-dense 6-DoF dynamical systems.
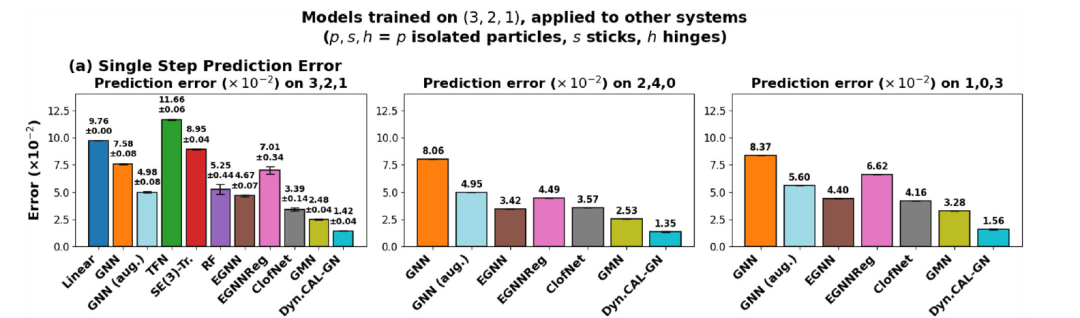
Constrained N-body dynamics
Overall, DYNAMI-CAL GRAPHNET outperforms all baseline models in both single-step and multi-step prediction tasks.
In Figure a below, DYNAMI-CAL GRAPHNET achieved the lowest single-step prediction error across various stem configurations, outperforming GMN, EGNN, and ClofNet. Subsequently, researchers introduced random rotation and translation enhancements, significantly improving the performance of the non-equivariant GNN and narrowing the gap with equivariant models. However, even with increased data volume and explicit contact geometric symmetry, GNN (aug.) still lagged behind the simplest equivariant models, EGNN and DYNAMI-CAL GRAPHNET, in all test configurations.
This indicates that:Inductive bias in the architecture remains crucial for generalizing constrained physical dynamics.
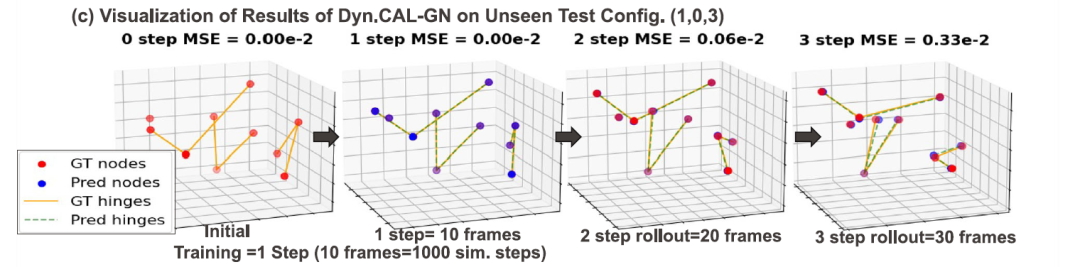
For multi-step rollout prediction, Figure b below compares DYNAMI-CAL GRAPHNET with GMN. The results show that...In multi-step rolling prediction with a maximum of 4 steps (where 1 step = 10 frames = 1000 simulation steps), DYNAMI-CAL GRAPHNET can maintain stable long-term prediction accuracy.The prediction error of GMN will gradually accumulate and increase significantly over time.
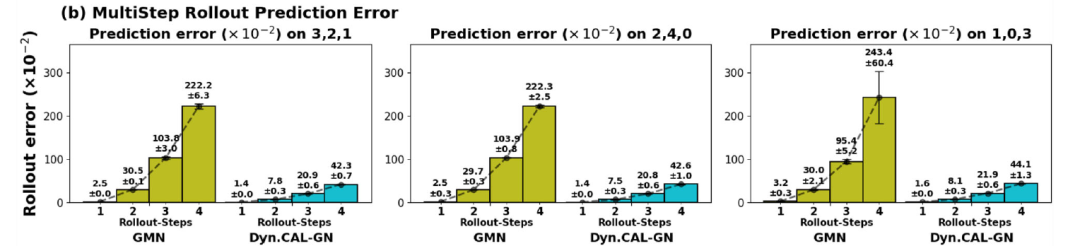
Figure c below shows the qualitative rolling prediction results on an unseen (1, 0, 3) structural configuration. Although the model was trained with only single-step supervision on data with different topologies,The proposed method can still accurately capture the dynamic behavior of constrained systems.
Human motion prediction
In human motion capture data, although the model only uses single-step supervised training, it can still maintain a stable trajectory in multi-step prediction, which shows that the model has successfully learned the spatiotemporal dynamic structure of human motion.
Figure a below shows the single-step prediction accuracy on the CMU human walking benchmark. The results indicate that:DYNAMI-CAL GRAPHNET achieves the lowest error among all methods, outperforming GMN. GMN uses 19 joints to represent the human skeleton and enforces constraints through 6 manually defined rigid connections, and then enforces constraints through a hand-designed forward kinematics (FK) module.
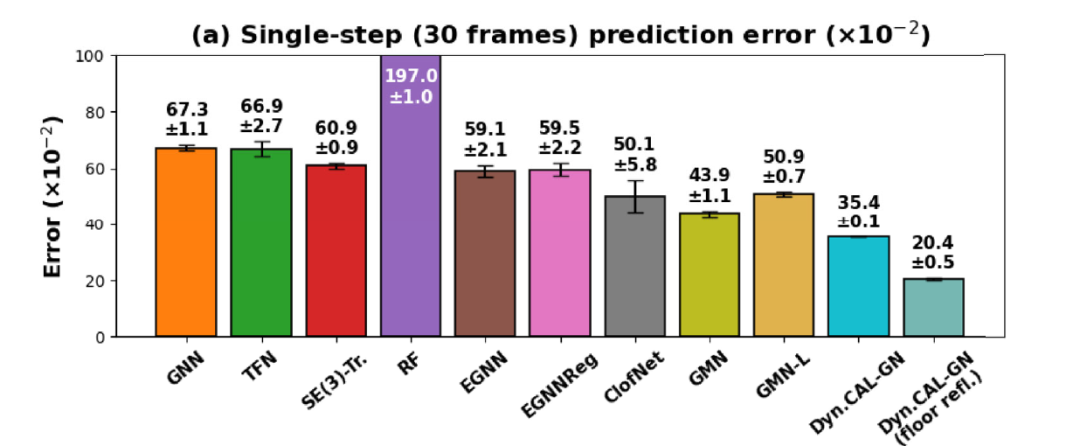
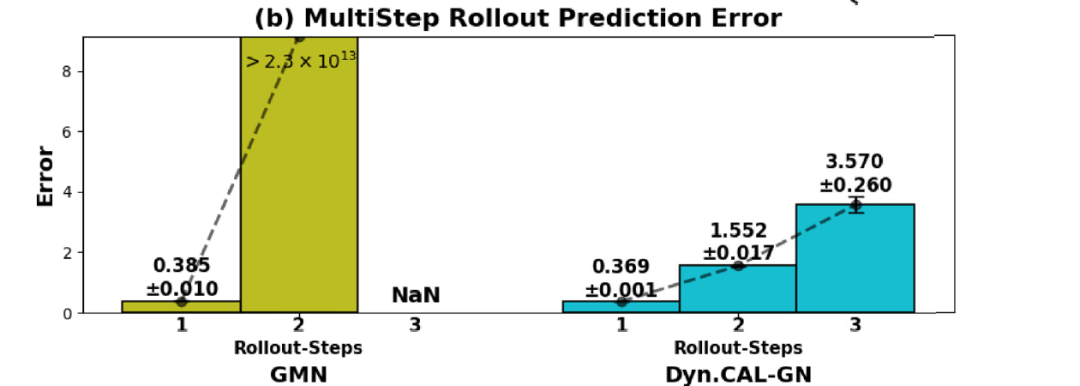
Figure b below shows that: although the model is trained using only single-step supervision,DYNAMI-CAL GRAPHNET maintains stable accuracy in multi-step rolling prediction, while GMN quickly diverges.
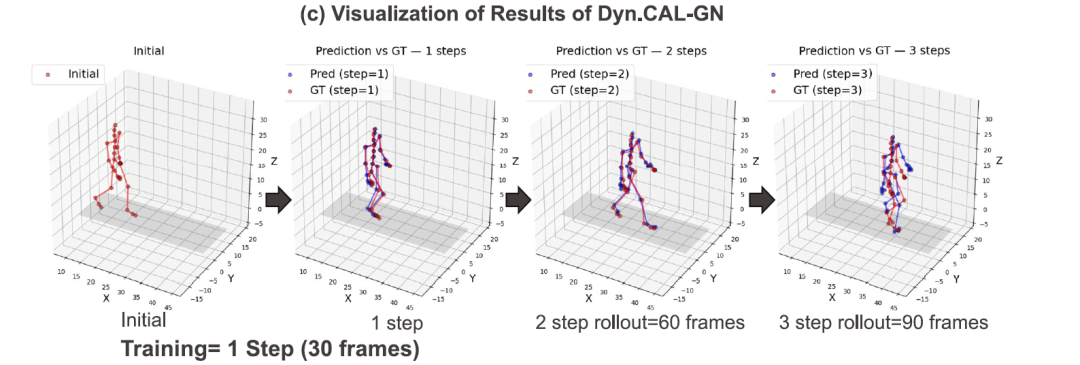
The qualitative results in Figure c below further illustrate that the predicted joint trajectories are continuous and consistent, physically reasonable, and highly consistent with the actual motion, and can remain stable in the future prediction of 90 frames.
Protein dynamics
Finally, the researchers also evaluated the model's ability to model complex, thermally perturbation-driven protein dynamics. The results showed that:DYNAMI-CAL GRAPHNET has excellent dynamic modeling capabilities in complex, fine-grained systems such as proteins.It can not only capture microstructural vibrations, but also predict large-scale conformational changes, with prediction accuracy exceeding that of many baseline methods.
From Physics Simulation to Embodied Intelligence World Models
With the development of artificial intelligence technology, a new research direction is rapidly gaining momentum—embedded AI. Unlike traditional AI, which primarily processes text or images, embedded AI emphasizes the interaction between intelligent agents and the real physical world. Robots, autonomous driving systems, and intelligent manufacturing equipment are all important application scenarios for embedded AI. In these systems, intelligent agents not only need to perceive their environment but also predict environmental changes and formulate action strategies accordingly. This means they must possess the ability to understand and predict the dynamic behavior of the physical world.
In recent years, an increasing number of researchers have proposed the concept of a world model. A world model refers to an internal model that can simulate dynamic changes in the environment, enabling intelligent agents to predict the future "in their minds." However, constructing a realistic and reliable world model is no easy task.In the real world, the motion of objects is usually constrained by complex physical laws, such as the conservation of momentum, friction, and collision dynamics. If the model cannot accurately depict these laws, the prediction results can easily deviate from reality in multiple steps of reasoning.Against this backdrop, physical information neural networks like DYNAMI-CAL GraphNet offer a new technological approach for the development of embodied intelligence.
In addition, the industry has made significant progress in efficiently and accurately predicting the evolution of complex physical systems. Physical systems often evolve across multiple time and spatial scales, while most learning models are typically trained only on short-term dynamics. Once used for long-term predictions, errors accumulate in complex systems, leading to model instability.
In this context,A research team from the Polymathic AI Collaboration introduced a series of new methods to address the above challenges. They proposed a fundamental model called Walrus, which has 1.3 billion parameters, uses Transformer as its core architecture, and is mainly oriented towards fluid-like continuum dynamics. Walrus covers 19 highly diverse physical scenarios during its pre-training phase, encompassing multiple fields including astrophysics, earth science, rheology, plasma physics, acoustics, and classical fluid dynamics. Experimental results demonstrate that Walrus outperforms previous baseline models in both short-term and long-term predictions for downstream tasks, and exhibits stronger generalization performance across the entire pre-training data distribution.
* Paper Title: Walrus: A Cross-Domain Foundation Model for Continuum Dynamics
* Paper link:https://arxiv.org/abs/2511.15684
The construction of physics AI models can, on the one hand, help scientists simulate complex systems more efficiently, such as molecular dynamics, materials science, and climate models; on the other hand, it can also provide intelligent robots with a more realistic understanding of the world. In a sense, enabling artificial intelligence to truly understand the physical world may be an important step towards general artificial intelligence.
References:
1.https://www.nature.com/articles/s41467-025-67802-5
2.https://mp.weixin.qq.com/s/fElxywueQ_an44rXkbjZ1A