Command Palette
Search for a command to run...
EllipseLIO:基于椭球表示的自适应激光雷达惯性里程计
EllipseLIO:基于椭球表示的自适应激光雷达惯性里程计
Rowan Border Margarita Chli
摘要
激光雷达惯性里程计(LIO)是许多无需依赖外部定位(如GPS)即可导航的移动机器人的关键组成部分。在不同环境中运行且使用异构激光雷达传感器的自主平台,需要一种能够适应这些不同场景而无需人工干预的LIO方法。现有的LIO方法在适当调参后,通常能够在环境和传感器相似的场景中提供可靠且准确的里程计。然而,许多方法在使用一致配置的情况下,难以在异构环境和传感器之间保持鲁棒的里程计性能。本文提出了EllipseLIO,这是一种实时LIO方法,通过采用能够根据传感器能力和环境自适应的激光雷达扫描滤波与配准方法,实现跨场景的泛化,而无需针对特定场景进行调参。在五个具有多样性和挑战性场景的数据集上,对EllipseLIO与当前最先进的LIO方法进行的实验表明,EllipseLIO整体表现最佳。其平均里程计误差比次优方法低38%,并且是唯一在所有实验中均未发散的方法。EllipseLIO的开源版本将在github.com/v4rl-ucy/ellipselio上提供。
一句话总结
EllipseLIO 是一种实时激光雷达-惯性里程计系统,该系统采用椭球体表示法,能够根据传感器能力与环境条件自适应地过滤并配准扫描数据,无需手动调参。在五个不同数据集中,该系统实现了最低的里程计平均误差,比第二优的方法降低了 38%,并且是实验中唯一避免发散的方法。
核心贡献
- 本文提出了 EllipseLIO,这是一种实时激光雷达惯性里程计框架,通过适配异构传感器与环境,消除了针对特定场景的手动调参需求。
- 该方法采用了自适应激光雷达扫描过滤与配准模块,能够动态适配传感器能力与环境特征。
- 在五个不同数据集上的评估表明,EllipseLIO 的平均里程计误差比第二优的方法低 38%,并且是所有测试中唯一避免轨迹发散的方法。
引言
激光雷达惯性里程计(LIO)使自主移动机器人能够在无 GPS 信号的环境中导航,使其成为在不同地形和传感器配置下实现实际部署的基础技术。现有的 LIO 系统通常仅在针对特定条件进行手动校准后才能提供高精度,这限制了它们使用单一配置在异构环境中保持稳健性能的能力。本文作者利用了自适应激光雷达扫描过滤与配准技术,该技术可自动适配传感器能力与环境变化。通过消除针对特定场景调参的需求,该方法始终优于最先进的方法,将平均里程计误差降低了 38%,并在所有测试场景中保持稳定性。
方法
本文作者采用了一种模块化架构,旨在通过紧耦合管线融合激光雷达与 IMU 的传感器数据,从而在不同环境中提供稳健且自适应的里程计功能。该框架分为四个主要阶段:预处理、里程计、建图和椭球体估计,每个阶段都增强了系统对不同传感器能力和环境结构的适应能力。该流程始于从 IMU 和激光雷达传感器采集原始数据,这些数据在融合前会进行独立处理。预处理阶段对激光雷达扫描数据应用基于距离的过滤,并根据传感器距离调整下采样分辨率,在确保计算效率的同时保持几何保真度。随后使用过滤后的数据进行运动去畸变,利用高频 IMU 状态估计来补偿扫描采集过程中的传感器运动。

请参考框架图以了解整体流程。里程计阶段采用迭代扩展卡尔曼滤波(iEKF)来估计传感器状态,状态更新由扫描到地图的配准过程驱动。基于高频 IMU 测量得到的状态预测会将最新状态向前传播,为下一次更新提供初始估计,并提供用于运动去畸变的变换参数。扫描配准过程采用基于椭球体的误差度量,其中每个点匹配的误差会根据与地图点关联的椭球体所表示的局部表面几何形状进行自适应调整。这种自适应机制使系统能够有效处理结构化与非结构化环境,避免了固定误差度量的局限性。里程计管线还集成了漂移校正机制,该机制会自适应地为点匹配分配权重。当传感器重新访问先前观测到的位置时,系统会优先使用来自较早地图点的匹配,从而在无需独立回环检测的情况下校正累积漂移。
建图阶段使用动态 iOctree 数据结构将处理后的激光雷达扫描数据聚合为全局一致的地图,该结构支持高效的点云插入与检索。这使得系统能够实时估计每个地图点的椭球体,从而表示局部表面几何形状。地图更新过程根据点到传感器的距离动态调整添加点的密度,确保近处点具有较高的密度和较小的椭球体以捕捉精细的表面细节,而远处点具有较低的密度和较大的椭球体。作为系统核心组件的椭球体估计模块采用张量投票(TV)方法计算表面几何形状。该模块首先利用由邻居点导出的张量为每个点计算初始表面法向量估计,随后通过张量投票传播这些估计值,获得表示局部表面几何形状的最终加权和。该过程根据最终张量的特征值将每个点的表面分类为直线、平面或球体,随后利用这些分类定义椭球体的轴与尺度,从而提供高保真度的底层几何表示。随后,该椭球体表示被直接应用于扫描配准过程,以自适应调整每个点匹配的误差度量,确保在不同场景中实现精确对齐。
实验
本文在涵盖城市、自然、航拍和水下环境的五个不同数据集上对 EllipseLIO 进行了评估,旨在与现有的激光雷达惯性里程计方法对比其里程计精度、环境鲁棒性与计算效率。对比实验验证了其自适应过滤与几何感知配准机制能够持续防止轨迹发散,并在受限与开放地形中有效降低漂移。消融实验进一步证实,各个架构组件对于维持系统稳定性与精度至关重要,尤其是自适应匹配权重分配与基于椭球体的配准模块。综合结果表明,该系统无需手动调参即可在不同传感器与场景中可靠泛化,在精度与一致性方面均优于现有方法。
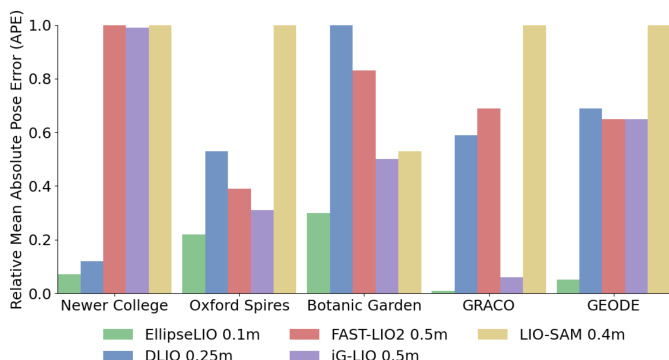
{"summary": "作者在五个不同数据集上评估了 EllipseLIO 与最先进方法的对比,使用相对平均绝对位姿误差衡量里程计性能。结果表明,EllipseLIO 在所有数据集中持续取得最低或次低误差且未发生发散,而其他方法要么发散,要么误差更高,尤其在挑战性环境中。该方法通过自适应扫描过滤与配准展现出鲁棒性,在结构化与非结构化场景中均保持稳定性能。", "highlights": ["EllipseLIO 在所有测试数据集中取得最优或次优的里程计性能且未发散。", "EllipseLIO 在结构化与非结构化环境中均优于对比方法,保持稳定的精度。", "该方法在扫描过滤与配准上的自适应能力使其能够在不同传感器与场景条件下实现可靠性能。"]
作者使用计算效率指标将 EllipseLIO 与最先进方法进行了对比。结果表明,EllipseLIO 在保持更精细地图分辨率的同时,实现了具有竞争力的计算时间与内存占用。该方法在运行时与内存效率方面优于其他方法。与最先进方法相比,EllipseLIO 的计算时间与内存占用具有竞争力。EllipseLIO 的内存占用低于 DLIO,同时保持了更精细的地图分辨率。EllipseLIO 的计算时间与 DLIO 相近,但内存效率更高。

{"summary": "作者在五个不同数据集上评估了 EllipseLIO 与最先进方法的对比,重点考察里程计性能与计算效率。结果表明,EllipseLIO 在所有序列中持续取得最优或次优性能且未发散,同时相比其他方法保持了实时运行能力与更低的内存占用。得益于自适应扫描过滤与配准机制,该方法在结构化与非结构化环境中均展现出鲁棒性。", "highlights": ["EllipseLIO 在所有数据集上取得最优或次优的里程计性能且未发散,优于所有对比方法。", "EllipseLIO 在构建更高分辨率地图的同时保持实时运行,且内存占用低于其他方法。", "该方法凭借自适应扫描过滤与配准机制,在不同环境中表现一致,有效降低了结构化与非结构化场景中的漂移。"]
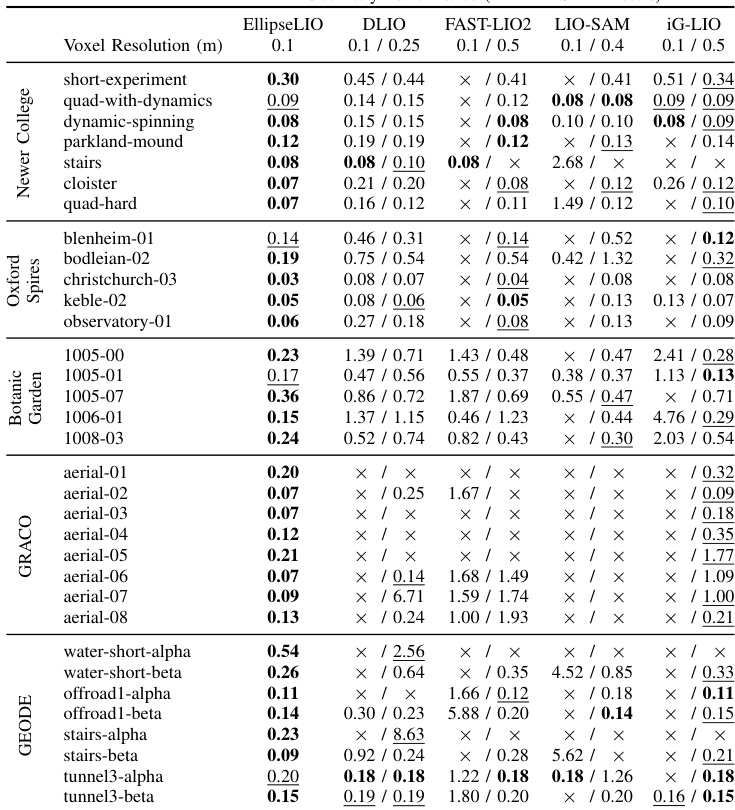
作者在多个数据集上将 EllipseLIO 与多种最先进方法进行了对比,验证了其卓越的性能与鲁棒性。结果表明,EllipseLIO 在所有序列中持续取得最低或次低里程计误差且未发散,而对比方法在某些环境中失效。消融实验证实,EllipseLIO 的每个组件均对整体性能有显著贡献。与其他方法不同,EllipseLIO 在所有数据集中均取得最优或次优性能且未发散。移除自适应匹配权重会显著增加相对平均 APE,表明其在漂移校正中的关键作用。基于距离的扫描过滤组件至关重要,因为移除该组件会导致大规模环境中误差大幅增加并引发发散。
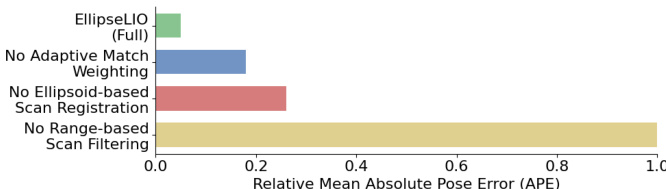
作者在五个不同数据集上将 EllipseLIO 与最先进方法进行对比,以验证其跟踪精度、计算效率及核心算法组件。综合测试表明,该系统持续提供稳健的里程计性能且未发生发散,通过自适应过滤与配准机制有效适配结构化与非结构化环境。此外,消融实验证实,自适应匹配权重与基于距离的过滤对漂移校正与大规模场景稳定性至关重要,而整体架构在保持地图分辨率的同时实现了实时运行与较低的内存消耗。