Command Palette
Search for a command to run...
YOLOv11 解密:高性能目标检测实用指南
YOLOv11 解密:高性能目标检测实用指南
Nikhileswara Rao Sulake
一键部署 YOLOv11
摘要
YOLOv11 是 You Only Look Once (YOLO) 系列实时目标检测器的最新迭代版本,引入了新颖的架构模块以提升特征提取和小目标检测能力。本文对 YOLOv11 进行了详细分析,涵盖其主干(backbone)、颈部(neck)和头部(head)组件。该模型的关键创新包括 C3K2 模块、空间金字塔池化快速版(Spatial Pyramid Pooling - Fast, SPPF)以及 C2PSA(带空间注意力的跨阶段局部网络)模块,这些模块在保持速度的同时增强了空间特征处理能力。我们在标准基准测试上将 YOLOv11 的性能与先前版本的 YOLO 模型进行了比较,突出了其在平均精度均值(mean Average Precision, mAP)和推理速度方面的提升。我们的结果表明,YOLOv11 在不牺牲实时性能的前提下实现了更高的准确率,使其非常适合应用于自动驾驶、监控和视频分析等领域。本研究将 YOLOv11 置于学术研究中加以系统化阐述,为未来的研究提供了清晰的参考依据。
一句话总结
本文对 YOLOv11 的架构进行了详细分析,展示了其 C3K2 模块、空间金字塔池化快速版(SPPF)以及 C2PSA 模块如何在保持实时推理速度的同时,增强空间特征提取与小目标检测能力。与早期 YOLO 版本的基准对比证实了其平均精度均值(mAP)的提升,并将该模型定位为自动驾驶、监控及视频分析领域的实用参考方案。
核心贡献
- 本文通过系统梳理 YOLOv11 的骨干网络、颈部网络与检测头组件,形式化地定义了其架构,为未来研究提供了清晰的参考基准。
- 本研究深入探讨了三项核心结构创新,即 C3K2 模块、空间金字塔池化快速版(SPPF)模块以及 C2PSA 注意力机制,这些设计有效提升了空间特征处理能力与小目标检测性能。
- 在 COCO 数据集上的基准测试表明,相较于早期版本,该优化设计在参数量减少 22% 的情况下实现了更高的平均精度均值(mAP),同时保持了实时推理能力。
引言
目标检测仍是计算机视觉的基础任务,在实际部署中平衡高精度与低延迟至关重要。尽管 YOLO 系列在单阶段检测方面持续取得进展,但早期版本在兼顾推理速度的同时,仍难以高效捕捉小目标或被遮挡的目标。为突破这些局限,本文提出 YOLOv11,该模型引入了 C3K2 模块、优化版的快速空间金字塔池化(SPPF)模块以及 C2PSA 部分空间注意力机制。这些架构改进强化了特征提取与小目标定位能力,以更少的参数量实现更高的平均精度均值,同时保留了 YOLO 系列标志性的实时性能。
方法
YOLOv11 采用模块化的骨干-颈部-检测头架构,遵循单阶段目标检测器的标准设计,同时引入多项创新组件以增强特征提取与检测性能。整体框架划分为三个核心部分:用于特征提取的骨干网络、用于多尺度特征聚合的颈部网络,以及用于预测目标位置与类别的检测头。完整架构概览请参阅框架示意图。
YOLOv11 的骨干网络负责从输入图像中提取分层特征。其结构以 Focus 层开头,后接一系列卷积与类残差模块。基础构建单元包含 Conv2D 层、批归一化(Batch Normalization)与激活函数。模型采用 SiLU 激活函数,该函数以其平滑性与非单调性著称,相较于传统的 ReLU 类激活函数具备一定优势。骨干网络中集成了类似 ResNet 的 Bottleneck 模块,通过恒等映射捷径(identity shortcuts)缓解深层网络中的梯度退化问题。这些模块通过一系列卷积处理特征,并包含一条将输入直接加到模块输出上的残差连接。该设计使得构建更深层的网络成为可能,且不会导致性能下降。
骨干网络的一项关键创新是 C3K2 模块,它是早期 YOLO 版本中跨阶段局部(CSP)瓶颈结构的演进版本。C3K2 模块通过分割特征图并应用一系列更小的 3×3 卷积来优化信息流,在保持计算高效性的同时保留关键特征。该模块由两个初始 Conv 块组成,后接一系列 C3K 模块,并以一个最终 Conv 块收尾。C3K 模块本身不对输入进行分割,而是通过一系列带有拼接操作的瓶颈层处理完整的特征图。C3K2 模块将 C3K 结构与 C2F 设计相结合,即最终 C3K 模块的输出会与初始 Conv 模块的输出在最终 Conv 层之前进行拼接。该结构在计算效率与精度之间取得了平衡,在 CSP 框架基础上进一步降低了冗余并改善了梯度流动。图 1 展示了完整的骨干网络结构,其中各阶段以 C2F、C3K2 和 Conv 模块逐级降低分辨率排列,旨在兼顾精度与速度。
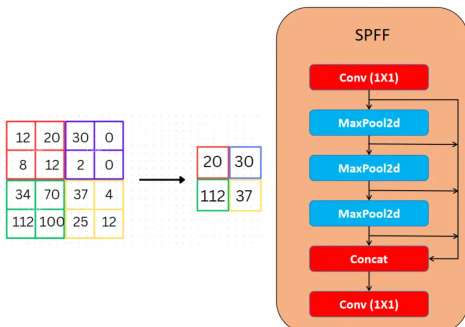
网络颈部专为多尺度特征聚合而设计,通过融合不同骨干网络阶段的特征来实现多尺度检测。YOLOv11 采用了改进的快速空间金字塔池化(SPPF)模块,该模块对同一特征图并行应用多种不同核大小的最大池化操作。此举能够捕获多尺度的上下文信息,对于同时检测小目标与大目标至关重要。SPPF 模块之后通过拼接与额外的卷积操作融合池化后的特征。相较于原始 SPP,该“快速”变体通过简化池化操作有效降低了延迟。经过 SPPF 处理后,网络采用上采样与拼接操作合并不同骨干阶段的特征,形成类似 PANet 的路径。这种组合确保了早期层级的细粒度细节与深层网络的高级语义信息均能得到有效利用。如图所示,SPPF 模块通过多个不同核大小的最大池化层处理特征图,随后将结果进行拼接。
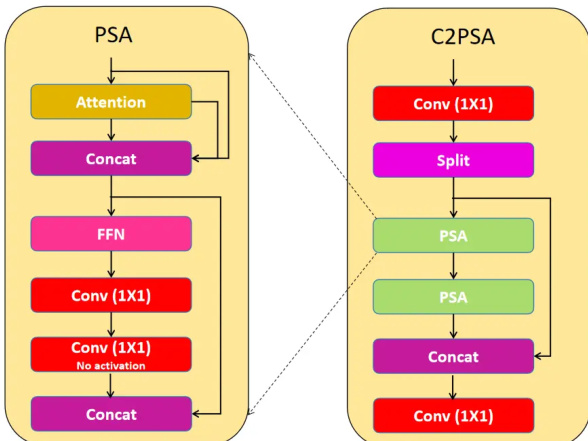
YOLOv11 的另一项重要创新是 C2PSA 模块,该模块引入了轻量级注意力机制以增强模型对图像关键区域的关注。此模块将跨阶段局部(CSP)结构与部分空间注意力(PSA)模块相结合。PSA 层负责计算空间注意力图以突出显著区域,使网络能够强化小目标或部分遮挡目标的特征响应。C2PSA 模块在特征图的不同分支上并行运行两个 PSA 模块,随后以类似 C2F 模块的方式将输出进行拼接。该设计在强调空间信息的同时,维持了计算成本与检测精度之间的平衡。C2PSA 模块通过对提取的特征施加空间注意力,进一步优化了模型对感兴趣区域的选择性聚焦能力。这使得网络能够将更多计算资源分配至挑战性区域,从而提升对小目标及遮挡目标的检测精度。C2PSA 模块的架构示意图如下所示。
检测头负责处理来自颈部的聚合特征,生成目标位置、类别及置信度的最终预测结果。其由一系列 Conv 模块与检测模块组成,可在多个尺度上输出预测结果,使模型能够检测不同尺寸的目标。整体架构旨在兼顾实时推理速度与高精度,使其适用于自动驾驶与监控等应用场景。
实验
评估方案涵盖对多样化图像与视频的定性推理、CPU 与 GPU 跨设备基准测试,以及基于 COCO 数据集与早期 YOLO 版本及先进模型进行的对比测试。这些实验验证了模型在遮挡与尺度变化下的鲁棒定位与分类能力,并通过大幅降低 GPU 推理延迟确认了其实时可行性。最终结果表明,得益于精细化的结构改进,YOLOv11 相较于早期版本及同类架构实现了更优的精度与效率平衡。
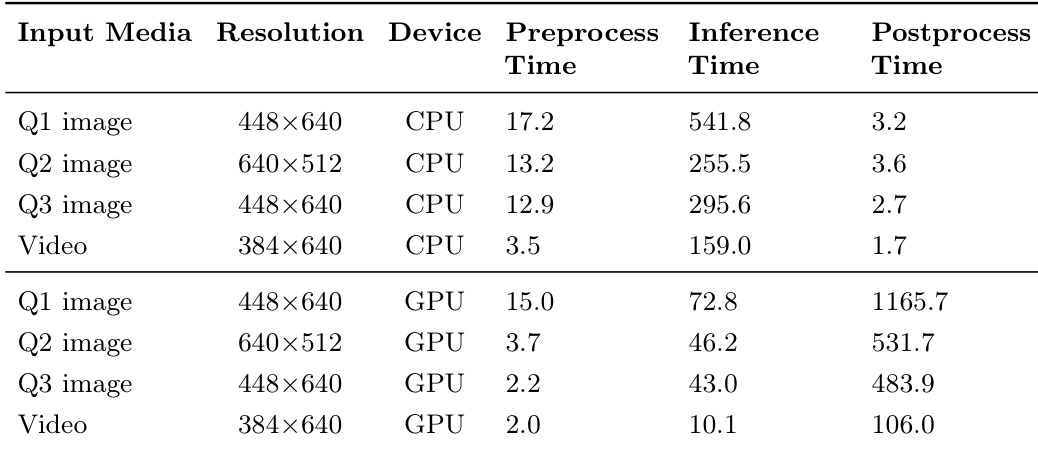
本研究评估了 YOLOv11 在不同输入类型与设备上的推理性能,对比了预处理、推理与后处理阶段在 CPU 和 GPU 上的执行时间。结果表明,GPU 加速显著缩短了推理时间,但由于分辨率提升与 I/O 开销增加,GPU 上的后处理时间相对较长。相较于 CPU,GPU 推理降低了整体延迟,且对所有输入类型的处理速度均更快。后处理时间在 GPU 上较高,尤其在高分辨率输入下更为明显。GPU 使推理时间大幅减少,而预处理与后处理时间则随输入分辨率和设备类型有所变化。
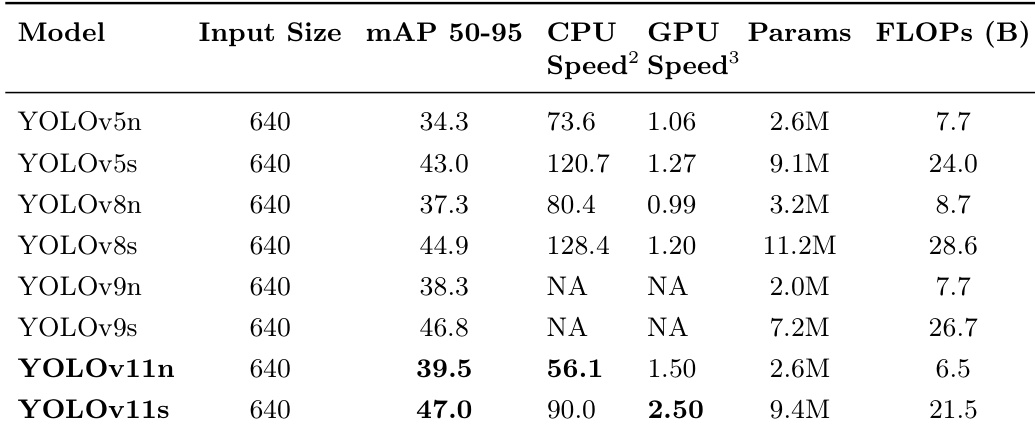
本文使用 mAP 与推理速度等标准指标,将 YOLOv11 与早期 YOLO 版本在 CPU 和 GPU 配置下进行了对比。结果显示,相较于早期模型,YOLOv11 实现了更高的精度与更快的推理速度,在性能与计算效率的平衡方面取得显著改善。YOLOv11 在 CPU 和 GPU 上均保持了较快的推理速度,同时 mAP 高于以往版本。YOLOv11 的各变体展现出更优的精度与效率权衡,尤其在实时部署场景中表现突出。模型的性能提升主要归功于架构改进,使其在多种条件下具备更强的检测能力。
本研究在不同输入分辨率的 CPU 与 GPU 设备上对 YOLOv11 进行了评估,以检验硬件加速的影响,并将其性能与早期 YOLO 版本进行基准对比。实验证实,尽管高分辨率下后处理开销有所增加,但 GPU 部署仍大幅降低了推理延迟。总体而言,相较于早期模型,YOLOv11 展现出更高的精度与更快的处理速度,为实时应用建立了更优的计算效率与检测性能平衡。