Command Palette
Search for a command to run...
处理时间序列数据的必要知识
摘要
一句话总结
该框架通过区分局部共识系统与类独裁策略,从协调运动时间序列中推断个体的跟随策略。在模拟及真实的鱼类和狒狒数据集中,其表现优于最先进的群体级分类方法,能够解析模拟中的复杂混合策略,并可泛化至任意实值序列。
核心贡献
- 提出一种计算框架以解决协调策略推断问题,从集体运动时间序列中解码个体的决策规则。
- 该方法能够区分每个 agent 采用的是局部共识系统、类独裁规则还是自回归策略,弥补了先前方法仅能分类群体级协调模型的方法学空白。
- 在模拟基准及真实的鱼群和狒狒群体数据集上的评估表明,该方法在识别主导策略和混合策略方面具有高精度,同时在群体级协调模型分类任务上优于 FLICA 框架。
引言
理解群体如何协调运动决策对于研究自然界的集体行为以及设计多 Agent 系统至关重要,然而先前的方法仅能对群体级协调模型进行分类或分析成对关系。这些现有方法无法识别个体所采用的具体策略,导致在理解个体决策机制如何结合以产生协调的群体行为方面存在关键空白。作者利用时间序列数据,通过引入一种能够检测协调区间、评估候选策略,并准确预测每个 agent 是依赖局部共识还是类独裁机制的框架,形式化并解决了协调策略推断问题。该方法在模拟和真实的动物运动数据上得到验证,其表现优于现有的群体级分类器,并可泛化至任意数值时间序列。
数据集
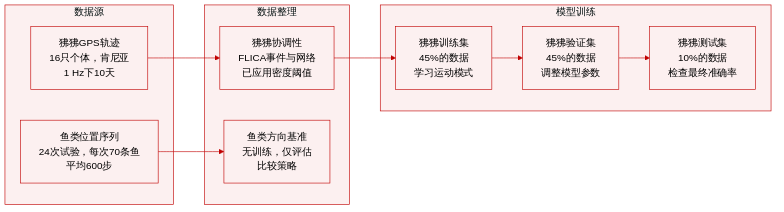
- 数据集构成与来源:作者使用两种不同的动物运动数据集来评估其框架。第一种通过 GPS 项圈记录肯尼亚野生橄榄狒狒群体的运动轨迹,第二种则通过受控的金光鱼实验捕获 2D 位置时间序列。
- 子集详情:
- 狒狒子集包含 16 个个体的 2D 经纬度轨迹,追踪时长为 10 天,采样频率为 1 Hz(早 7 点至晚 7 点)。每个个体的记录跨越 419,095 个时间步。
- 鱼类子集包含 24 次实验试验,每次试验在 2D 空间中追踪 70 条鱼。每次试验平均包含 600 个时间步,其中包含 10 个经过训练的 agent,它们会引导群体向觅食点移动。不同试验之间的个体身份未被追踪。
- 处理与元数据构建:针对狒狒数据,作者使用 FLICA 算法提取协调事件,并在第 25、50、75 和 99 百分位数处应用网络密度阈值。他们为协调事件定义了 240 个时间步的窗口,为动态跟随网络定义了 60 个时间步的窗口。由于鱼类数据集缺乏跨试验的身份元数据,作者跳过模型训练,转而构建一个方向预测评估流水线,该流水线使用自定义风险函数将知情策略与随机基线进行比较。
- 模型使用与评估划分:狒狒数据集采用 10 折交叉验证进行划分,其中 45% 用于训练,45% 用于验证,10% 用于测试。该划分支持下一步运动方向预测,并允许作者检验关于潜在协调策略的假设。鱼类数据集仅作为评估基准,作者报告了每个时间步上所有 agent 的方向预测误差分布,以验证策略性能比较的结果。
方法
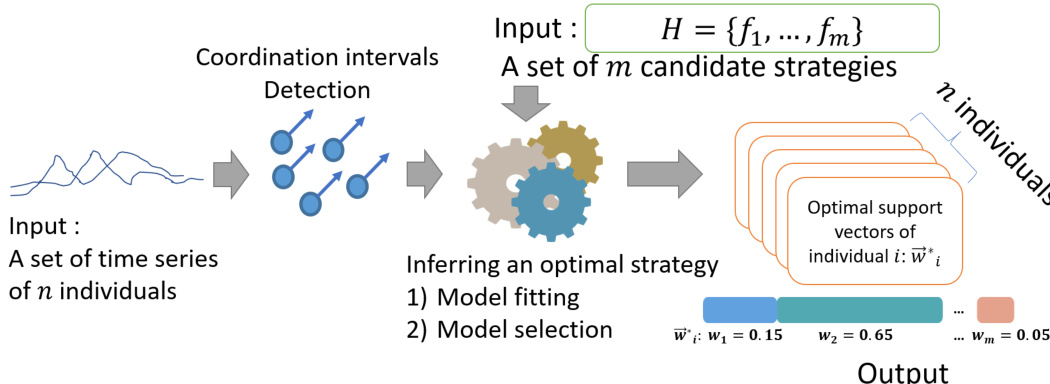
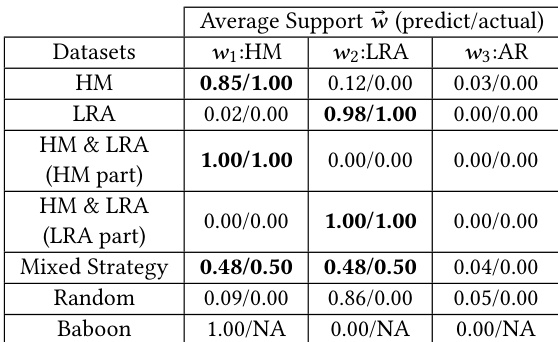
用于推断协调策略的框架通过两个阶段运行:模型拟合与模型选择,旨在确定 agent 实现集体运动所采用的底层策略。整体工作流程始于一组表示 n 个个体状态的时间序列数据,其中每个状态被定义为欧几里得空间中的一个方向。系统输入由该时间序列集合与一组候选策略函数 H={f1,…,fm} 组成,用于对 agent 的行为进行建模。输出为每个个体的最优支持向量集合,指示最能解释其观测运动状态的候选策略混合比例。
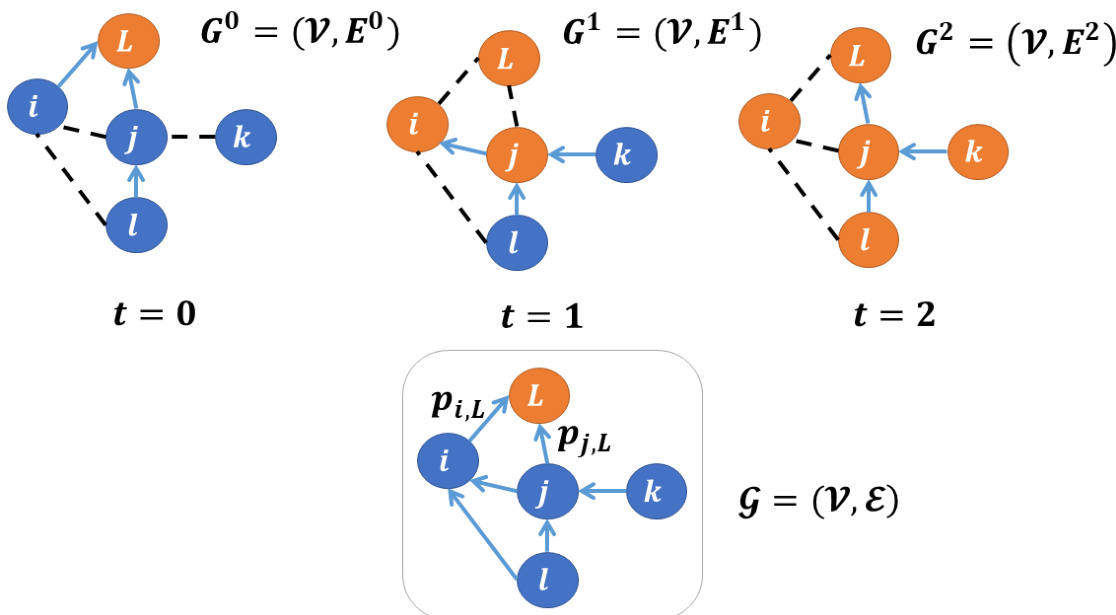
第一阶段为模型拟合,涉及使用训练数据估计候选策略的参数。该过程首先检测输入时间序列中的协调区间,即群体表现出协调行为的时段。基于这些区间,推断出动态跟随网络,以捕捉 agent 之间的时间依赖性。随后,该网络根据全局领导排名进行聚合与剪枝,形成有向无环图 (DAG) 概率网络 G,用以表示群体的底层社会结构。该网络对于层次模型 (HM) 策略至关重要,该策略将 agent 建模为以概率权重跟随领导者或一组特定个体。对于每个 agent i 和时间步 t,HM 策略函数 fHM′(St−1,i) 将下一状态预测为其自身上一状态与其在 G 边定义下的跟随者状态的加权平均值。相比之下,局部可逆共识 (LRA) 策略依赖于 agent 的物理邻近性。它通过计算时间 t−1 时 agent 位置的 Delaunay 三角剖分中其邻居状态的平均值,来预测 agent i 的下一状态,从而捕捉个体跟随其直接物理邻居的行为。第三种候选策略为自回归 (AR) 模型,该模型假设 agent 的运动仅基于其自身过去的状态,与邻居无关。模型拟合阶段将这三种策略组合为混合策略函数 fmix(a,w),其中 a=(Pt,St−1,i),且 w=[w1,w2,w3]T 为表示各策略权重的支持向量。目标是通过最小化风险函数来寻找每个 agent i 的最优支持向量 wi∗,该风险函数定义为预测方向与实际方向之间平方误差的总和。该优化受限于权重之和为一且位于指定阈值区间内的要求,该要求可用于强化对特定策略出现概率的先验信念。
第二阶段为模型选择,用于从拟合阶段生成的一组候选模型中选出拟合度最高的模型。该过程通过在独立的验证数据集上评估模型来实现。该过程涉及调整阈值向量 κ,以生成每个 agent i 的模型集合 Φi。每个模型由支持向量 wi∗ 和对应的阈值 κ 定义。随后选择使验证数据上风险最小的支持向量作为最优支持向量 wi∗。每个 agent 的最终推断基于最优支持向量中策略的相对权重。若 HM 策略的权重最高,则推断该 agent 遵循层次结构。若 LRA 策略的权重最高,则推断该 agent 跟随其物理邻居。若 AR 策略的权重最高,则推断该 agent 独立运动。若多种策略均具有显著权重,则推断为混合策略。该两阶段框架能够从时间序列数据中稳健地推断个体级协调策略,为理解集体运动背后的机制提供了一种全面的方法。
实验
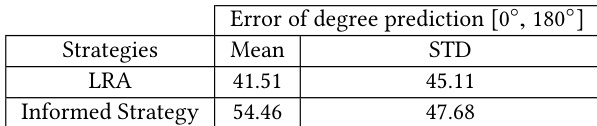
所提出的框架在模拟数据集和两种生物运动记录上进行了评估,以验证其推断个体级协调策略和分类群体级模型的能力。模拟结果表明,该方法能够准确恢复同质与异质策略分布,同时优于纯策略基线并避免过拟合。应用于生物数据后揭示,狒狒倾向于跟随特定个体而非空间邻居,而鱼类则通过追踪直接局部邻居进行协调,两项发现均与既定的行为观察结果一致。此外,与最先进的 FLICA 框架相比,该方法实现了更优的群体级分类,证实了其在捕捉复杂协调动力学方面的稳健性。
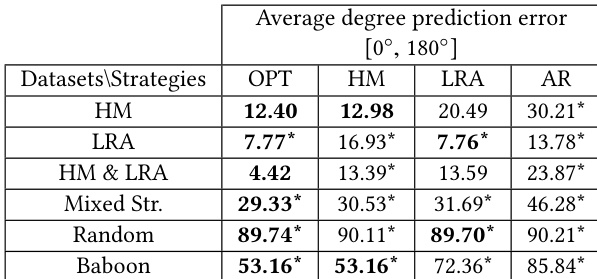
作者比较了模拟与生物数据集中预测运动方向的不同策略。结果表明,所提出的框架在预测精度上优于基线策略,且最优策略在大多数情况下误差最低。该框架还被证明能够有效区分不同的协调模型,特别是在复杂的混合策略场景中。在模拟数据集中,所提出的框架相比基线策略实现了更低的预测误差。在分类群体级协调模型方面,该框架的表现优于现有方法。该方法在混合策略设置下能够准确推断个体级策略,证明了其在复杂场景中的有效性。
作者通过比较不同策略的预测误差,在模拟与生物数据集上评估了其推断协调策略的框架。结果表明,该方法在大多数情况下优于基线策略,特别是在混合与复杂场景中,且比最先进的方案提供更准确的群体级分类。该框架还在动物运动数据中识别出不同的行为模式,例如狒狒跟随特定个体以及鱼类跟随邻居。在大多数模拟数据集中,所提出的框架相比基线策略实现了更低的预测误差,尤其是在混合与复杂案例中。在群体级分类任务中,该框架优于最先进的方案,表明其对异质策略的处理能力更强。生物数据集的结果表明,狒狒跟随特定个体,而鱼类跟随其直接邻居,这与已知行为模式相符。
作者通过在模拟与生物数据集上评估其框架来推断个体级协调策略。结果表明,该方法在模拟数据中能够准确预测正确策略,优于现有方法,并揭示了狒狒与鱼类运动中的不同行为模式。该框架成功识别出混合策略并避免过拟合,这一点在不同数据集上表现一致的性能得到了证实。在模拟数据集中,该框架准确推断出个体策略,优于基线方法并成功检测出混合策略。在生物数据中,该框架揭示狒狒跟随特定个体,而鱼类跟随其邻居,这与已知行为模式相符。该方法通过正确识别随机运动数据中缺乏协调性,从而避免过拟合。
作者通过在模拟与生物数据集上评估其框架,以验证其推断个体协调策略和分类群体级运动模式的能力。受控模拟实验表明,该方法能够可靠地区分复杂的混合策略,并在避免过拟合的同时保持稳健的泛化能力。对真实世界动物追踪数据的分析进一步验证了该框架的实际效用,因为它能够准确恢复既定的生态行为,例如狒狒跟随特定领导者以及鱼类追踪直接邻居。综合来看,这些结果证实该方法能够有效捕捉复杂的协调动力学,并在多样化与异质场景中优于现有方法。