Command Palette
Search for a command to run...
浙江大学利用 SVM 优化触觉传感器,盲文识别率达 96.12%

生物传感是人类与机器、人类与环境、机器与环境交互的重要媒介。其中,触觉能够实现精准的环境感知,帮助使用者与复杂环境交互。
为模仿人类的触觉,科研人员开发了各种传感器,以模拟皮肤对环境的感知。然而,触觉传感的要求高、参数变化多样,需要大量的研发经验、充分的文献调研和大量的试错实验,研发周期很长。
为此,浙江大学的研究者利用支持向量机进行摩擦电纳米发电机触觉传感器的参数优化。优化后的触觉传感器能够识别多种触摸模式,并实现盲文识别。这一成果有望为触觉传感器的研发提供新方案。
作者 | 雪菜
编辑 | 三羊
为模仿人类的感觉系统,研究人员开发了一系列类皮肤传感器,以监测触摸、压力、震动、温度和湿度等信息。其中,触觉传感器是与复杂环境交互最重要的部分,已广泛应用于健康监测、智能机器人、人机环境交互和虚拟/增强现实中。
理想的传感器应具备高灵敏度、宽工作范围和优异的可重复性。这往往需要根据研发经验或是文献调研选择传感器参数,然后进行多次的试错实验,最后用优化得到的传感器进行特定工作。
然而,这种前馈的设计策略隔绝了传感器的设计和应用,增大了数据负担,弱化了信号特征,降低了计算分析效率。
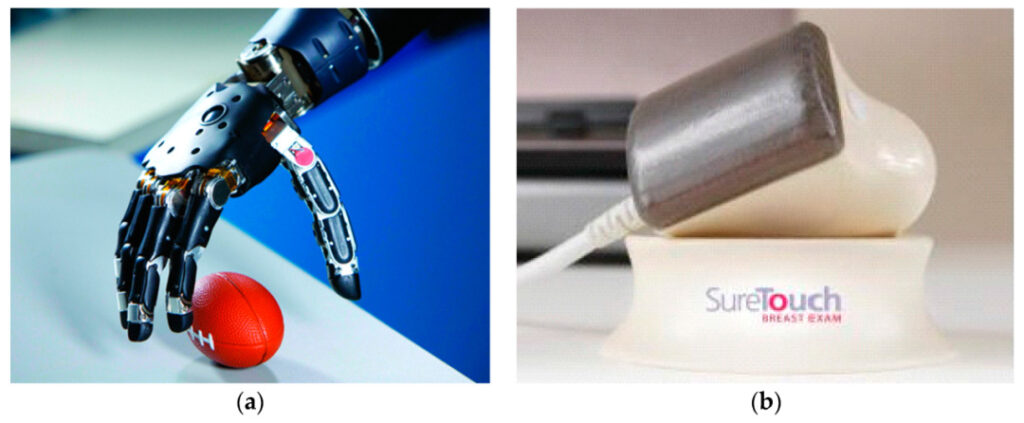
图 1:基于触觉传感器的模块化假肢 (a) 和乳腺检查传感器 (b)
为提高传感器信号识别的稳定性,机器学习算法常用于分析不同通道信号之间的相关性和细微差别。近日,浙江大学的杨赓和徐凯臣课题组更进一步,通过支持向量机 (SVM) 优化了摩擦电纳米发电机 (TENG) 触觉传感器的设计。优化后的传感器能准确识别 6 种动态触摸模式,并据此进行文字识别和盲文识别。相关成果已发表于「Advanced Science」。

相关成果已发表于「Advanced Science」
论文链接:
https://onlinelibrary.wiley.com/doi/10.1002/advs.202303949
实验过程
概述:优化参数和优化算法
以 TENG 为基础的触觉传感器的性能主要与以下参数有关,包括输出信号类型、电极密度、表面微结构的形状和分布,也即 SVM 算法要优化的参数。
手指上的传感器能够识别 6 种触摸模式,包括按压、轻拍、上移、下移、左移和右移。这 6 种触摸模式的识别即为传感器的测试目标,用于对设计参数进行优化。
SVM 算法用于评价输出信号质量,筛选出最优设计参数。与传统的经验驱动设计流程不同,SVM 的设计流程提供了一种数据驱动的参数优化方法,将器件的设计和算法紧密联系在了一起。

图 2:基于机器学习的触觉传感器优化流程
机器学习模型:SVM + CNN
本研究在 Python 中运用 scikit-learn 库得到 SVM 分类器。分类器共 10 个,正则化参数范围为 0.1-1.0 。
同时,基于 PyTorch 框架,用 Python 开发一维卷积神经网络 (CNN),用于验证过程的特征学习和识别。 CNN 包括 5 个卷积层,后接批量归一化函数和线性整流单元 (ReLU) 。模型通过自适应矩估计 (Adam) 算法进行训练,学习率 0.001,batch size 为 128 。

图 3:CNN 模型示意图
制作流程:激光直写 + PDMS 封装
TENG 触觉传感器的制作主要包括 6 个步骤:
1 、通过红外激光直写技术制作叉指电极。激光的热效应可以诱导聚酰亚胺 (PI) 膜碳化,得到激光诱导石墨烯 (LIG) 图形;
2 、将聚二甲基硅氧烷 (PDMS) 旋涂在 LIG/PI 膜上;
3 、 PDMS 溶液渗入 LIG 的孔状结构后,剥离 PI 膜,得到 LIG/PDMS 薄膜;
4 、用氧等离子体对薄膜进行处理,引入电负性基团,并除去薄膜表面杂质;
5 、引入全氟乙烯丙烯共聚物 (FEP) 薄膜,增强器件的摩擦电效应;
6 、最后用 PDMS 进行封装,并通过激光进行图形化。

图 4:TENG 触觉传感器制作流程
输出信号类型:电流与电压
输出信号类型与 TENG 的检测性能高度相关,因此研究人员首先对比了摩擦电压和摩擦电流对传感器性能的影响。
首先是这两种输出信号类型的数据可重复性。电流信号的分布不规则,且与平均数据的偏差较大,而电压数据与平均数据只有较小的偏差,重复性更强。
此外,研究人员利用线性 SVM 分类器进行了数据分类,电压信号的分类准确率为 94.278%,电流信号的准确率为 95.579% 。电压信号和电流信号的可分离性 (Separability) 和离散性 (Dispersion) 分别为 [3,636, 11.877] 和 [3.528, 11,267] 。
为消除不同维度数据的影响,将上述指标归一化后,电压信号的结果由 [94,278%, 3.636, 11,877] 变为 [0, 1, 1],电流信号的结果由 [95,579%, 3.528, 11,267] 变为 [1, 0, 0] 。这说明电压信号有两个评价标准,更适用于信号输出。

图 5:输出电压和输出电流对 6 种触摸模式的信号响应
a&b:分别为电压和电流对 6 种触摸模式的信号响应;
c&d:分别为输出电压和电流信号的降维结果。
电极密度:稀疏与密集
电极的密度会影响信号的复杂度。研究人员探究了电极稀疏分布和密集分布时的器件性能。信号降维后,可以看到稀疏分布的电极信号区分度更大。
稀疏排布电极信号的分类准确率、可分离性和离散性分别为 [96.975%, 3.695, 14.759],密集排布的电极为 [95,958%, 3.528, 11.542] 。归一化后分别为 [1, 1, 1] 和 [0, 0, 0],说明稀疏排布的电极信号有三个评价标准。
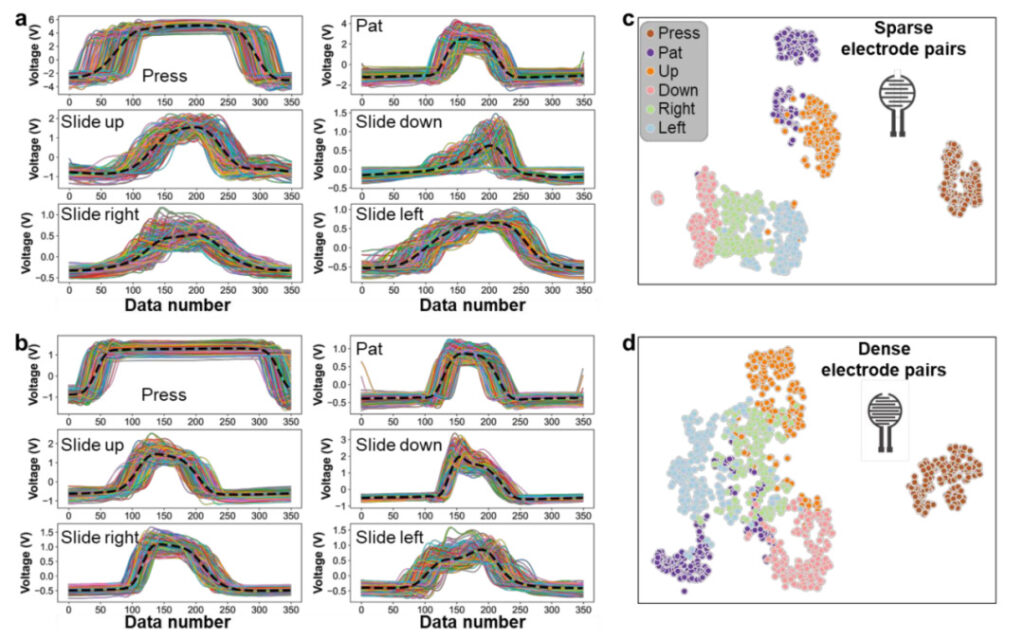
图 6:稀疏分布和密集分布电极对 6 种触摸模式的信号响应
a&b:分别为稀疏分布电极和密集分布电极对 6 种触摸模式的信号响应;
c&d:分别为稀疏分布电极和密集分布电极记录信号的降维结果。
微结构形状:指纹与网格
PDMS 表面粗糙的微结构可以降低粘性效应对信号的影响,提高信号的信噪比。研究人员对比了指纹状的微结构和网格状的微结构对器件性能的影响,发现指纹状结构的数据更加集中,而网格状结构的信号不稳定。
指纹状结构和网格状结构信号的准确率、可分离性和离散性分别为 [96.50%, 4.227, 14.958] 和 [95.056%, 3.725, 11.783] 。归一化后为 [1, 1, 1] 和 [0, 0, 0],说明指纹状的微结构更适于本实验。

图 7:指纹状微结构 (a) 和网格状微结构 (b) 对 6 种触摸模式的信号响应
微结构分布:沟道间隔
指纹状微结构中,相邻沟道的间隔同样会影响信号的质量。研究人员对比了沟道间隔为 100 、 200 和 300 µm 的器件性能,三者的归一化指标分别为 [1, 0.902, 1] 、 [0.042, 1, 0] 和 [0, 0, 0.228],说明间隔越小越有利于信号的输出。
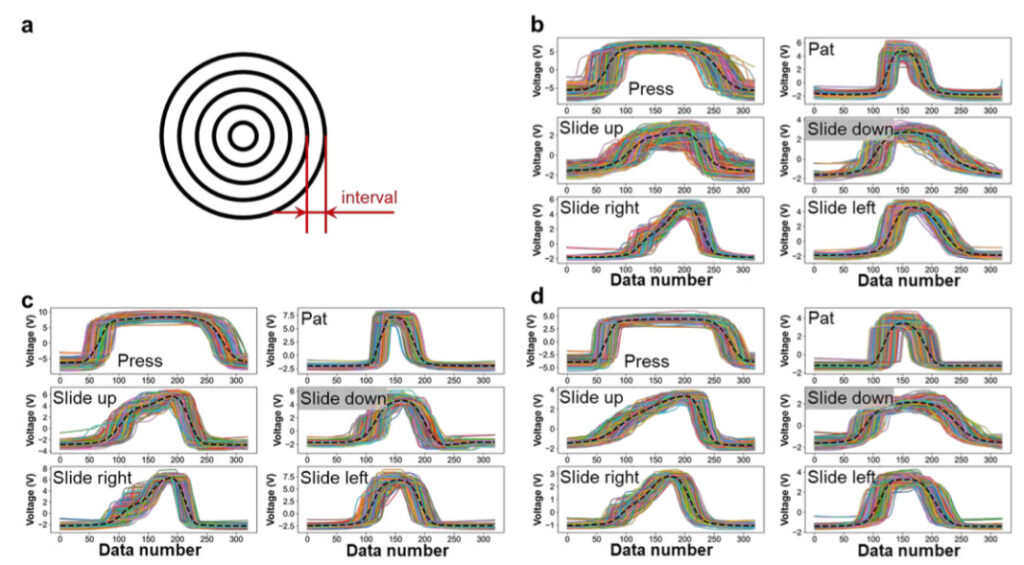
图 8:不同沟道间隔对 6 种触摸模式的信号响应
a:指纹状微结构沟道间隔示意图;
b&c&d:分别为沟道间隔为 300 µm 、 200 µm 、 100 µm 时的信号响应。
SVM 优化得到的器件参数总结如下:

表 1:SVM 优化参数及结果汇总
实验验证:文字识别
得益于 SVM 算法优化得到的参数,TENG 触觉传感器能够准确识别 6 种触摸模式。因此,在电压测量模式下,TENG 触觉传感器可以分辨不同字母,进而实现文字识别。
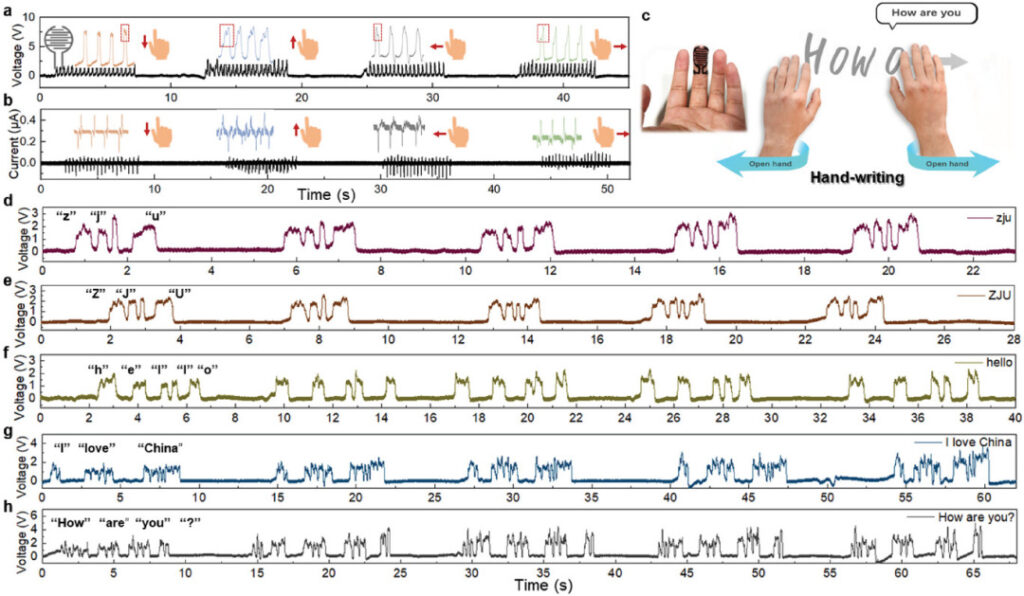
图 9:TENG 触觉传感器在文字识别中的应用
a&b:分别为上下左右滑动时的电压和电流输出;
c:通过触摸进行文字识别的过程示意图;
d-h:TENG 触觉传感器对不同语句的响应信号。
仿生验证:盲文识别
为模仿人类皮肤的触摸特性,上述 TENG 触觉传感器被固定在机器手上,用于盲文识别测试。首先通过机器手收集 10 个盲文数字的触摸信号。之后,通过高通滤波,提取出滑动过程中的微弱信号。

图 10:10 个盲文数字的触摸信号(左)及降维分布(右)
这些盲文数字具有较高的相似性,存在一定的识别难度。为此,研究人员使用了 CNN 用于特征学习和分类。 CNN 的分类准确率为 96.12%,仅对 0, 3, 8 这 3 个相似度很高的盲文数字准确率较低。
为验证其在实际应用中的可行性,研究人员利用机器手进行了 11 位盲文电话号码的实时识别。在打印出一组盲文电话号码后,机器手能够连续识别每位数字,提供实时反馈,并在图像用户界面 (GUI) 上显示。

图 11:TENG 触觉传感器用于盲文电话号码的实时识别
上述结果表明,SVM 优化的 TENG 触觉传感器可以通过接触有效识别文字,增强了机器与环境之间的交互能力,并有望为残障辅助提供新方案。
TENG 触觉传感器
最早的生物传感器是基于抗原-抗体的免疫反应或是 DNA 双链反应构建的。这些传感器非常精准,但多用于分子生物学,很难进行大规模的生物监测。
「物联网」这一概念被提出后,研究人员开始研发高通量、低成本、大规模的生物传感器,包括触觉传感器的一系列环境传感器应运而生。

图 12:生物传感器的发展历程
早期的触觉传感器是基于电阻、电容、压电、热电效应等设计的,这些元器件会大大增加传感器的体积,限制了其多场景使用。
2012 年,TENG 被提出后,触觉传感器的研发进入新阶段。纳米级的 TENG 可以被嵌入各种柔性基底中,构成可穿戴传感器,进而衍生出了电子皮肤等理念。
然而,传统的 TENG 触觉传感器研发主要依靠课题组的经验、文献调研与多次试错推进。如今,在 AI 的帮助下,TENG 触觉传感器的研发可以由经验驱动转向应用驱动,这能够大大降低研发周期和成本,加速研发落地,助力 TENG 触觉传感器与需求侧结合,为人们的生活提供更多便利。
参考链接:
[1]https://www.mdpi.com/1424-8220/17/11/2653
[2]https://onlinelibrary.wiley.com/doi/full/10.1002/adma.202008276








