HyperAI
Command Palette
Search for a command to run...
CHIP 工业椅子 6D 姿态估计数据集
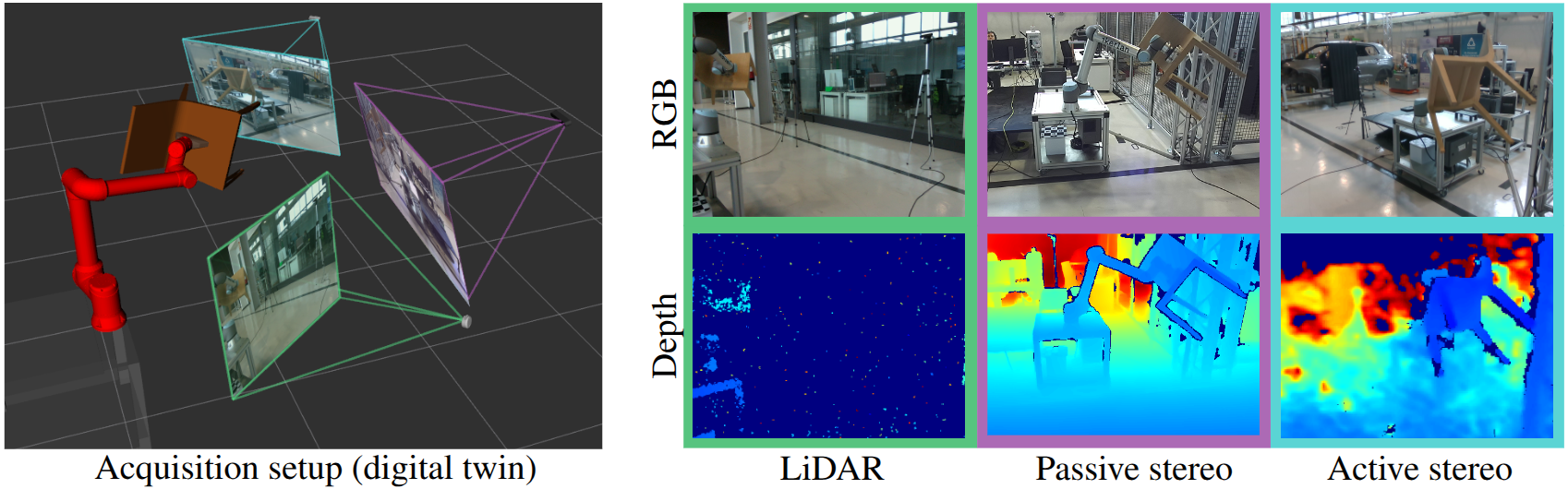
CHIP 是由 FBK-TeV 联合 Ikerlan 和 Andreu World 于 2025 年发布的一个面向真实工业场景下机器人操控的 6D 姿态估计数据集,相关论文成果为 CHIP: A multi-sensor dataset for 6D pose estimation of chairs in industrial settings,旨在弥补现有基准主要集中于家庭物体和实验室布置而缺乏真实工业条件的数据缺口。 该数据集共包含 77,811 张 RGB-D 图像,覆盖 7 种不同结构与材质的椅子模型。图像由机器人手臂在真实工业环境中采集,使用 Intel RealSense D435 、 RealSense L515 和 StereoLabs ZED 三类 RGB-D 传感器获取,所有椅子的 6D 姿态标注均由机器人运动学系统自动生成,平均每类椅子约有 11,115 条高精度注释。数据集中还包含不同程度的遮挡场景,包括机器人手臂及人类操作员造成的中度或严重遮挡,并伴随细粒度干扰物体,充分体现工业环境的复杂性。
Citation
@inproceedings{nardon2025chip,
title={CHIP: A multi-sensor dataset for 6D pose estimation of chairs in industrial settings},
author={Nardon, Mattia and Mujika Agirre, Mikel and González Tomé, Ander and Sedano Algarabel, Daniel and Rueda Collell, Josep and Caro, Ana Paola and Caraffa, Andrea and Poiesi, Fabio and Chippendale, Paul Ian and Boscaini, Davide},
booktitle={British Machine Vision Conference (BMVC)},
year={2025}}
此数据集由社区用户贡献,仅用于教育和信息目的。如有任何内容涉及版权侵权,请通过 [email protected] 联系我们,我们将及时审核并删除。