HyperAI
Command Palette
Search for a command to run...
VOID 深度估计数据集
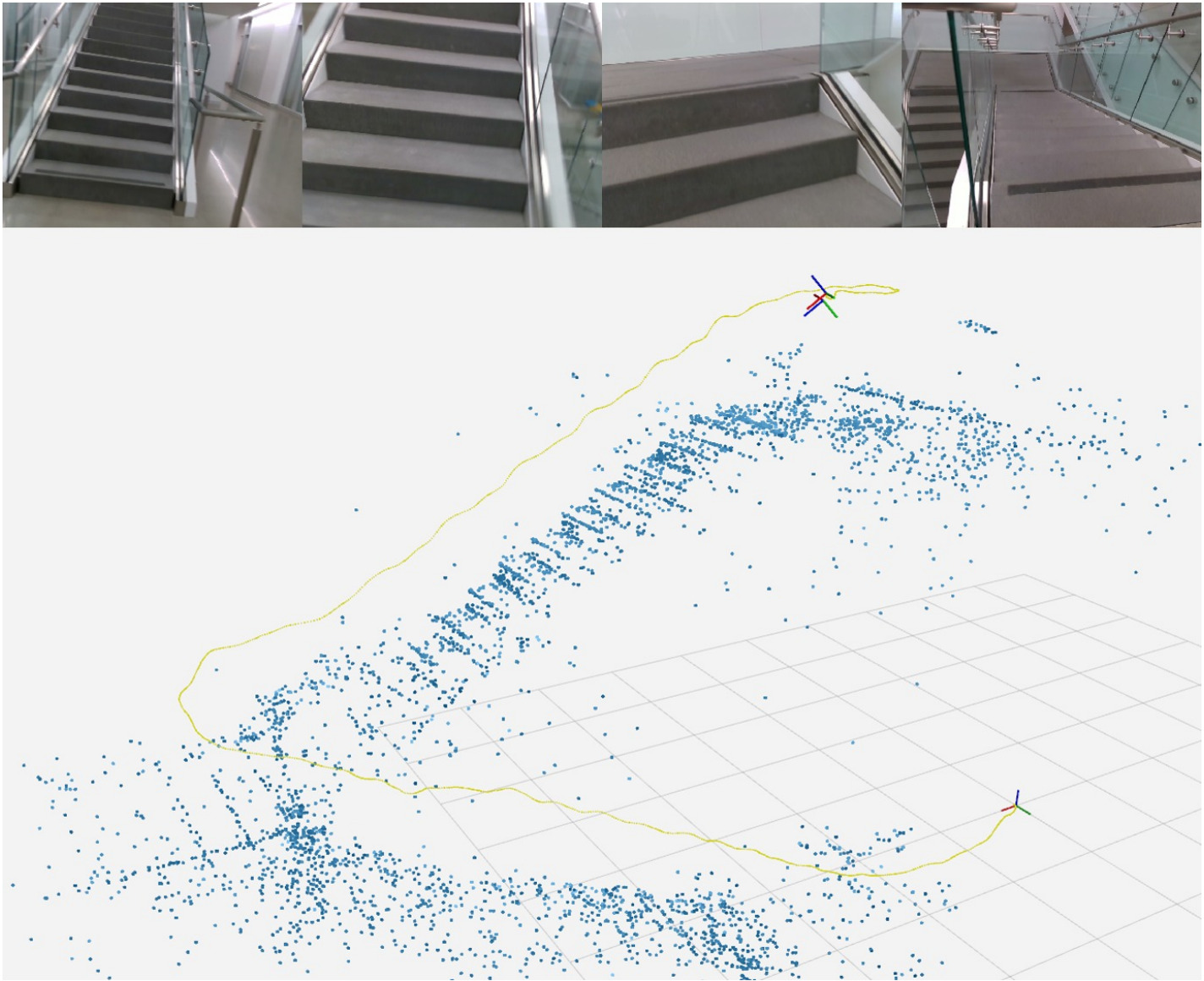
VOID 全称 Visual Odometry with Inertial and Depth,该数据集总共包括 56 个视频序列,其中 48 个序列(约 47k 帧)是训练集,另外 8 个序列是测试集。 该数据集覆盖室外、室内各种场景,包括:classrooms, offices, stairwells, laboratories, gardens 等。每个序列都包含涉及三个密度级别(1500 点、 500 点和 150 点)的稀疏深度图,三个密度级别对应于 VGA 大小的 0.5% 、 0.15% 和 0.05% 。
Citation
@article{wong2020unsupervised, title={Unsupervised Depth Completion From Visual Inertial Odometry}, author={Wong, Alex and Fei, Xiaohan and Tsuei, Stephanie and Soatto, Stefano}, journal={IEEE Robotics and Automation Letters}, volume={5}, number={2}, pages={1899–1906}, year={2020}, publisher={IEEE} }
此数据集由社区用户贡献,仅用于教育和信息目的。如有任何内容涉及版权侵权,请通过 [email protected] 联系我们,我们将及时审核并删除。