Command Palette
Search for a command to run...
Please provide the title you would like me to translate.
Please provide the title you would like me to translate.
رؤية الحاسوب و OpenCV
الملخص
Please provide the title and abstract you would like me to translate.
One-sentence Summary
The authors present a computer vision system that utilizes edge computing and multi-point video recording to perform offline automated, markerless, multi-species insect counting, tracking, and behavioural analysis, effectively overcoming the restricted spatial coverage of existing approaches and demonstrating scalable pollinator monitoring across nine polytunnel stations on a commercial berry farm where it successfully tracked four insect varieties with an F-score above 0.
Key Contributions
- A novel multi-point computer vision system is introduced to facilitate markerless data capture, automated counting, and behavioral analysis for multiple insect species across large-scale agricultural areas.
- The tracking pipeline employs a hybrid detection architecture combining YOLOv2 with K-nearest neighbours segmentation to maintain robust localization of unmarked insects in dynamic outdoor conditions. This dual-model strategy automatically switches between detection modes when environmental changes disrupt segmentation, while a low-resolution processing mode accelerates video analysis.
- Field validation on a commercial berry farm across nine polytunnel monitoring stations demonstrates successful tracking of four insect varieties with an F-score above 0. The resulting behavioral datasets enable fine-grained comparisons of species-specific pollination contributions to support precision agriculture interventions.
Introduction
The authors leverage computer vision and edge computing to address a critical need in precision agriculture: scalable monitoring of insect pollinators across large, uncontrolled farm environments. Effective pollination management is vital for global food security, yet traditional manual sampling is labor-intensive and prone to observer bias, while existing automated tracking systems are typically confined to controlled laboratories or limited to single-species setups. These prior approaches struggle with complex outdoor variables like shifting light and wind-blown vegetation, and they lack the multi-species, multi-location resolution required for real-world agricultural management. To overcome these constraints, the authors introduce a novel markerless monitoring framework that captures multi-point video footage, performs offline automated counting and tracking, and analyzes insect foraging behavior across diverse species. When deployed on a commercial berry farm, the system successfully tracked four insect varieties across nine stations with high accuracy, providing growers and apiarists with actionable, data-driven insights to optimize crop yields and enhance pollination efficiency.
Dataset

Dataset Composition and Sources
- The authors collect video footage using Raspberry Pi 4 edge computing camera traps equipped with Sony IMX219 sensors deployed across nine field locations.
- Recording parameters are fixed at 1920x1080 resolution and 30 frames per second, with each continuous clip lasting 10 minutes.
- System metadata including camera location, recording date, and recording time is automatically embedded into each video caption.
Subset Details and Filtering Rules
- The authors construct a custom detection dataset of 3,073 frames manually annotated with bounding boxes using CVAT.
- Class distribution includes Hymenoptera (combined honeybees and Vsepidae, 2,602 instances), Syrphidae (204 instances), Lepidoptera (93 instances), and strawberry flowers (14,050 instances).
- The trajectory dataset undergoes strict filtering to remove false positive tracks originating from non-insect detections.
- Ambiguous Hymenopteran classifications are resolved through manual review and behavioral rules, such as assigning flower-visiting insects to honeybees and predatory movers to Vespidae.
Data Usage and Training Configuration
- The authors train a YOLOv4 deep learning model in TensorFlow using a learning rate of 0.001 on the prepared image subset.
- The trained model processes the field videos to extract insect movement tracks and pollination behaviors without real-time on-device inference.
- A pretrained model checkpoint and dedicated evaluation data are provided with the repository to support downstream analysis and reproducibility.
Processing and Post-Processing Pipeline
- Video analysis is offloaded to a high-performance computing cluster featuring Intel Xeon Gold processors and NVIDIA Tesla P4 GPUs.
- Annotation workflows cross-reference individual frames with source videos to minimize false negatives on small, fast-moving insects.
- Final trajectory generation applies a multi-stage classification process that first identifies insects via still frames and then refines Hymenopteran subtypes through manual verification and movement behavior analysis.
Method
The proposed methodology consists of a three-stage pipeline for automated insect and pollination monitoring, beginning with remote video capture, followed by automated multi-species tracking, and concluding with spatial behavior analysis. The system leverages a multi-point remote video capture setup using Raspberry Pi devices equipped with cameras to record insect activity in agricultural environments. These devices are designed for scalability and edge computing, enabling continuous monitoring in uncontrolled or semi-controlled settings. The captured video data, along with embedded metadata such as time and location, is processed offline to extract insect and flower trajectories.
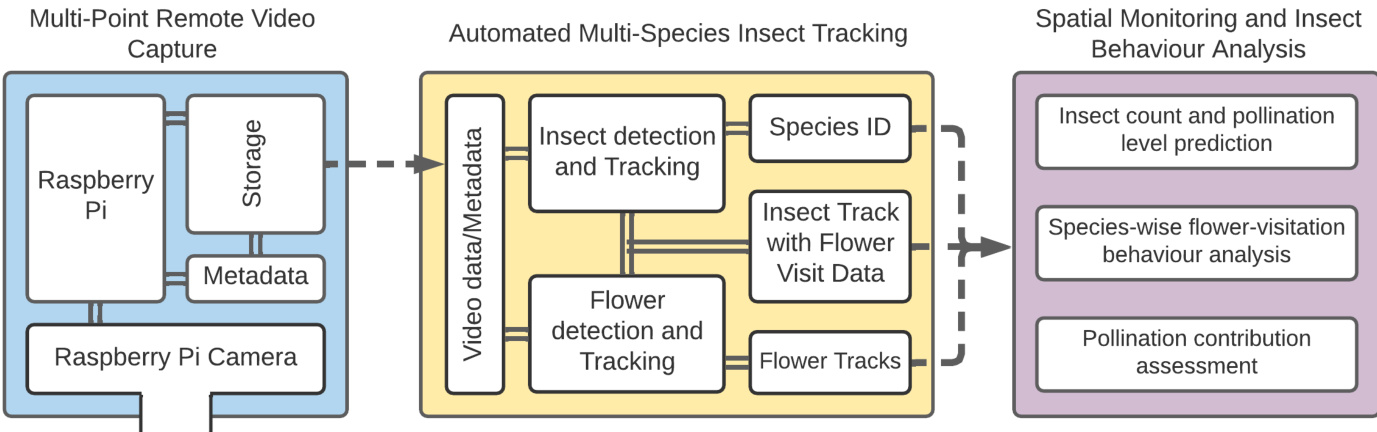
Refer to the framework diagram, which illustrates the overall workflow. The initial stage involves video capture and metadata extraction. The video data is then fed into the automated multi-species insect tracking module, which operates through a hybrid detection model. This model combines a deep learning-based object detector, specifically YOLOv4, with a K-nearest neighbors-based foreground/background segmentation model to robustly detect insects in varying lighting and foliage conditions. Upon detection, the insect's species is identified, and a snapshot is saved for optional human verification. The algorithm employs a low-resolution processing mode to efficiently handle periods of inactivity, reducing computational load when no insects are present.
The tracking process is built upon methods from Polytrack, enabling the formation of coherent insect trajectories across frames. In each frame, the position of a detected insect is compared to the positions of flowers to identify flower visits. A visit is recorded when an insect remains within the radius of a flower for more than five consecutive frames, ensuring that transient movements are not mistaken for interactions. The system also incorporates a "predict and detect" approach for flower tracking, where the predicted position of each flower is associated with detected instances using the Hungarian algorithm to maintain continuous flower movement tracks. If a flower is not detected in a frame, its last known position is carried forward, and newly detected flowers are treated as new entries.
The output of the tracking module includes insect trajectories with associated flower visitation data and flower movement tracks. This information is then used for spatial monitoring and behavior analysis. The analysis involves quantifying insect counts, calculating species-specific flower visitation frequencies, and assessing pollination contribution. Metrics such as the number of flowers visited by a species, total visits to a flower, and the number of flowers fertilized based on a predefined visit threshold are computed. The system enables the inference of pollination events by analyzing these spatiotemporal interactions, providing insights into the efficiency of different insect species and guiding data-driven pollination management strategies.
Experiment
A computer vision system utilizing remote video recording was deployed across a commercial strawberry farm to automatically track four key insect species and analyze their flower visitation patterns. The initial evaluation validated the system against manual observations, confirming its reliability in extracting insect trajectories and behavioral interactions. Subsequent field analysis applied the tracked data to quantify spatial pollination dynamics, demonstrating that honeybees are the dominant and most effective pollinators while alternative species contribute minimally to crop fertilization. Ultimately, the study establishes that automated spatial monitoring and behavioral analysis can efficiently generate comprehensive pollination data to support precision agriculture and targeted pollinator management.
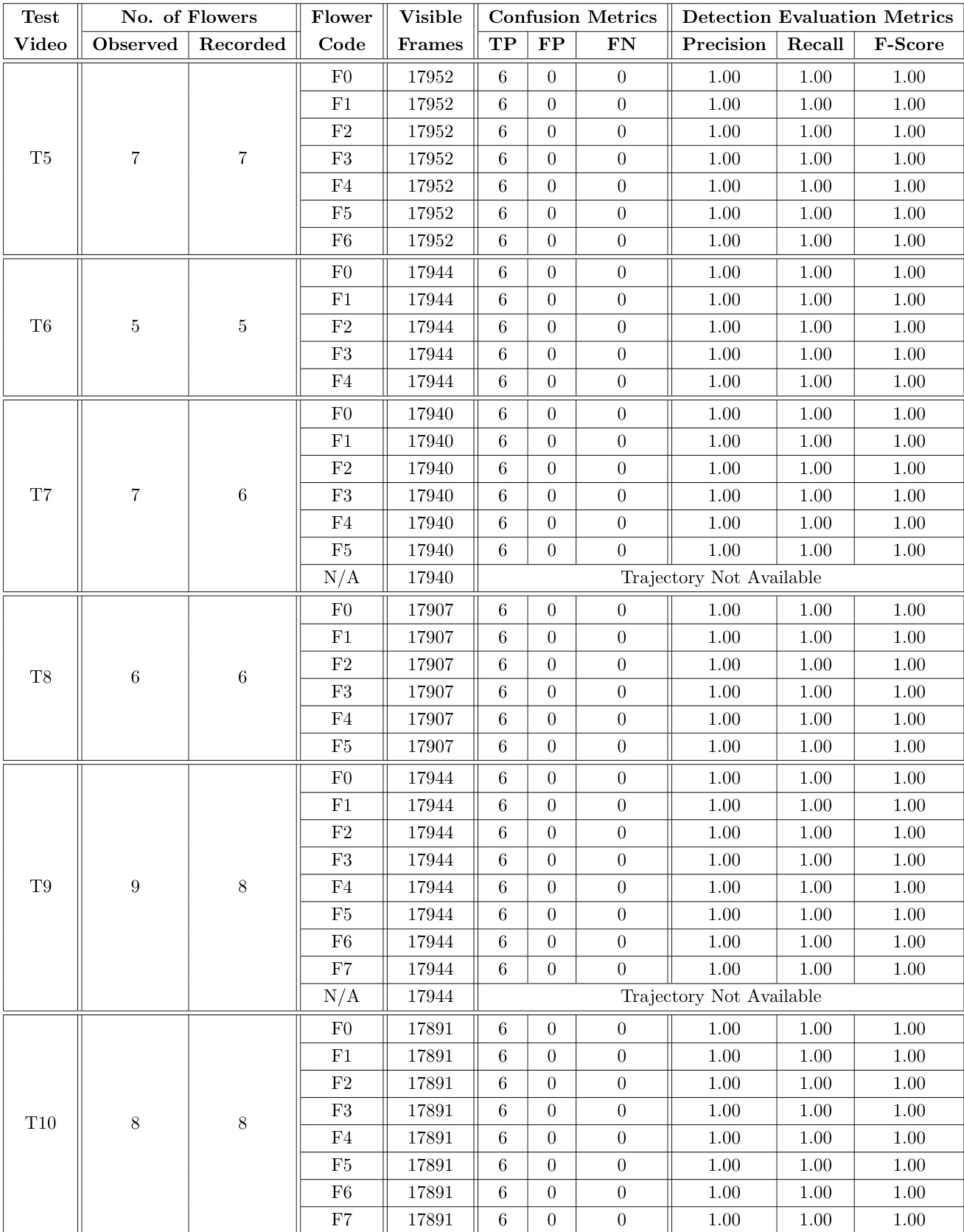
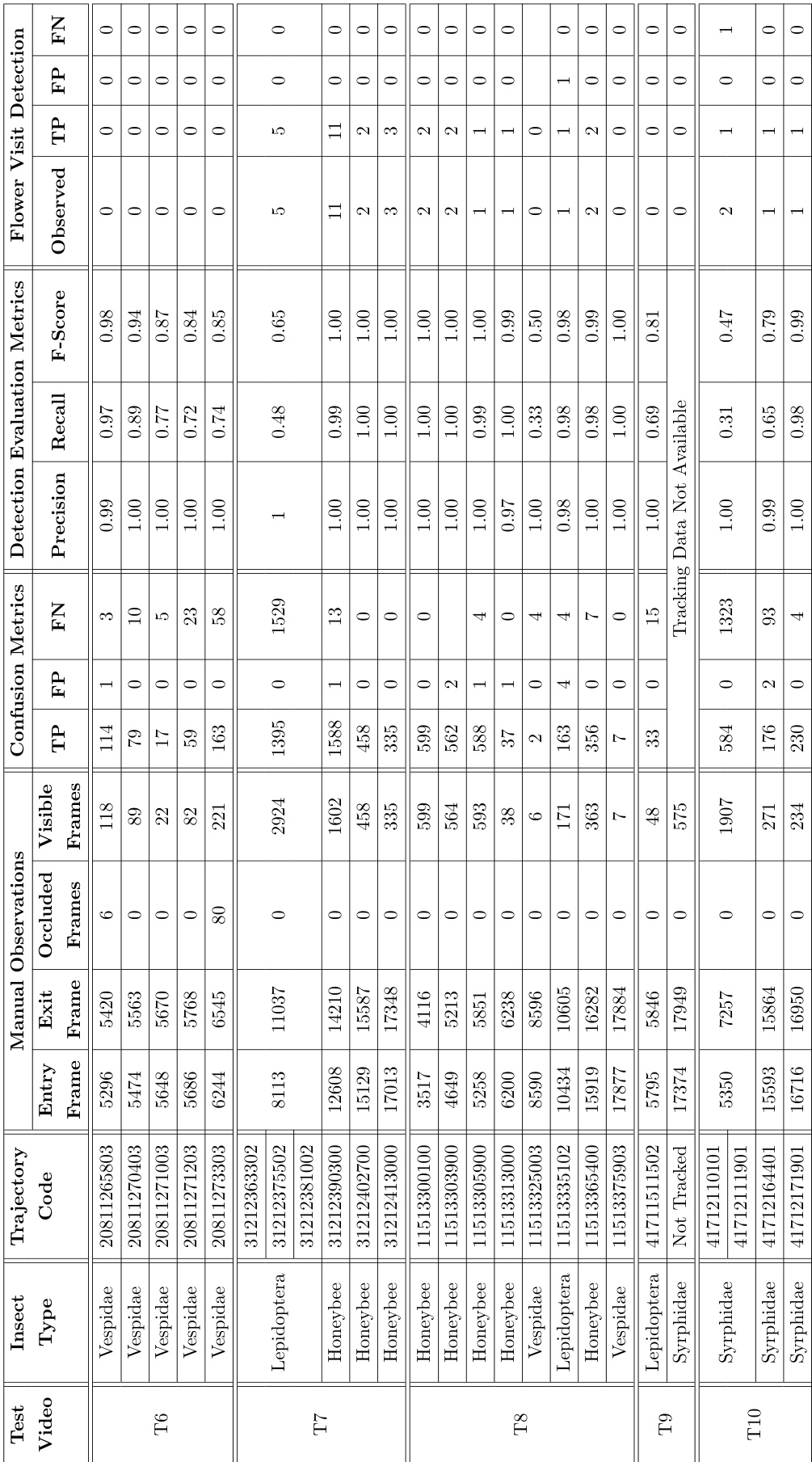
The authors implemented a computer vision system for monitoring insect behavior on a commercial strawberry farm, focusing on tracking four insect types and their interactions with flowers. The system demonstrated high detection accuracy for honeybees and reasonable performance for other insects, with results indicating that honeybees were the primary contributors to flower visits necessary for pollination. The analysis revealed that a majority of flowers received sufficient visits for fertilization, predominantly due to honeybee activity. The system achieved high detection accuracy for honeybees, with strong precision and recall metrics, while performance for other insect types was lower due to factors like movement speed and detection challenges. Honeybees were the dominant pollinators, contributing the majority of flower visits, whereas other insects like Vespidae had minimal impact on pollination despite being present. A significant proportion of strawberry flowers received the minimum number of visits required for fertilization, primarily through honeybee activity, highlighting their critical role in pollination at the site.
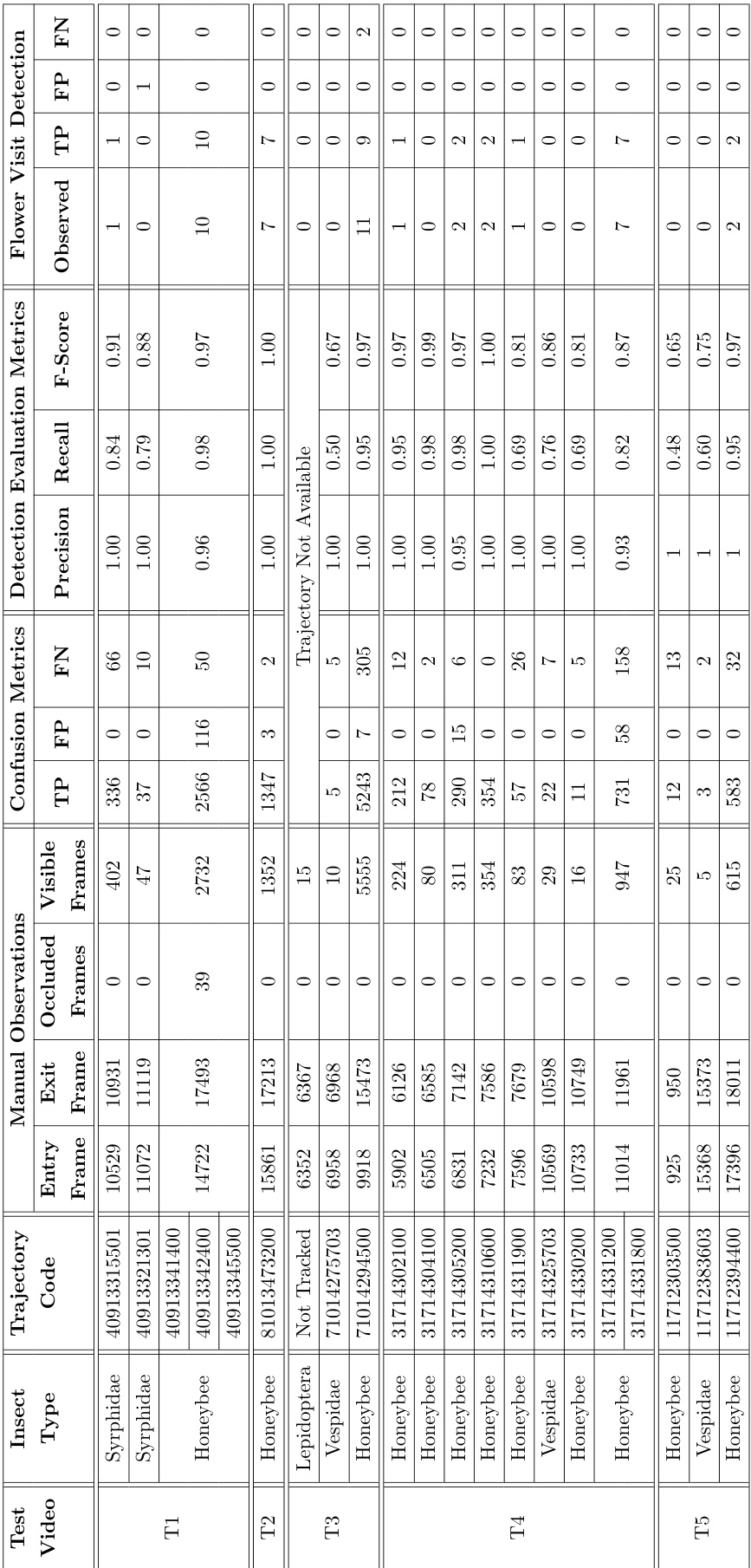
The authors evaluated a computer vision system for tracking insect behavior and flower visits on a commercial strawberry farm, focusing on four insect types. The system demonstrated high precision and F-scores for honeybees and other insects, with performance varying across species due to factors like movement speed and detection challenges. Results showed that honeybees were the primary contributors to flower visits, significantly exceeding the minimum required for pollination, while other insects had minimal impact. The system achieved high precision and F-scores for tracking honeybees and other insect types, with performance varying based on species-specific behaviors. Honeybees were the dominant pollinators, with a significant proportion of flowers receiving the required number of visits for fertilization. Other insect types contributed minimally to pollination, with low visitation rates and limited impact on flower fertilization outcomes.
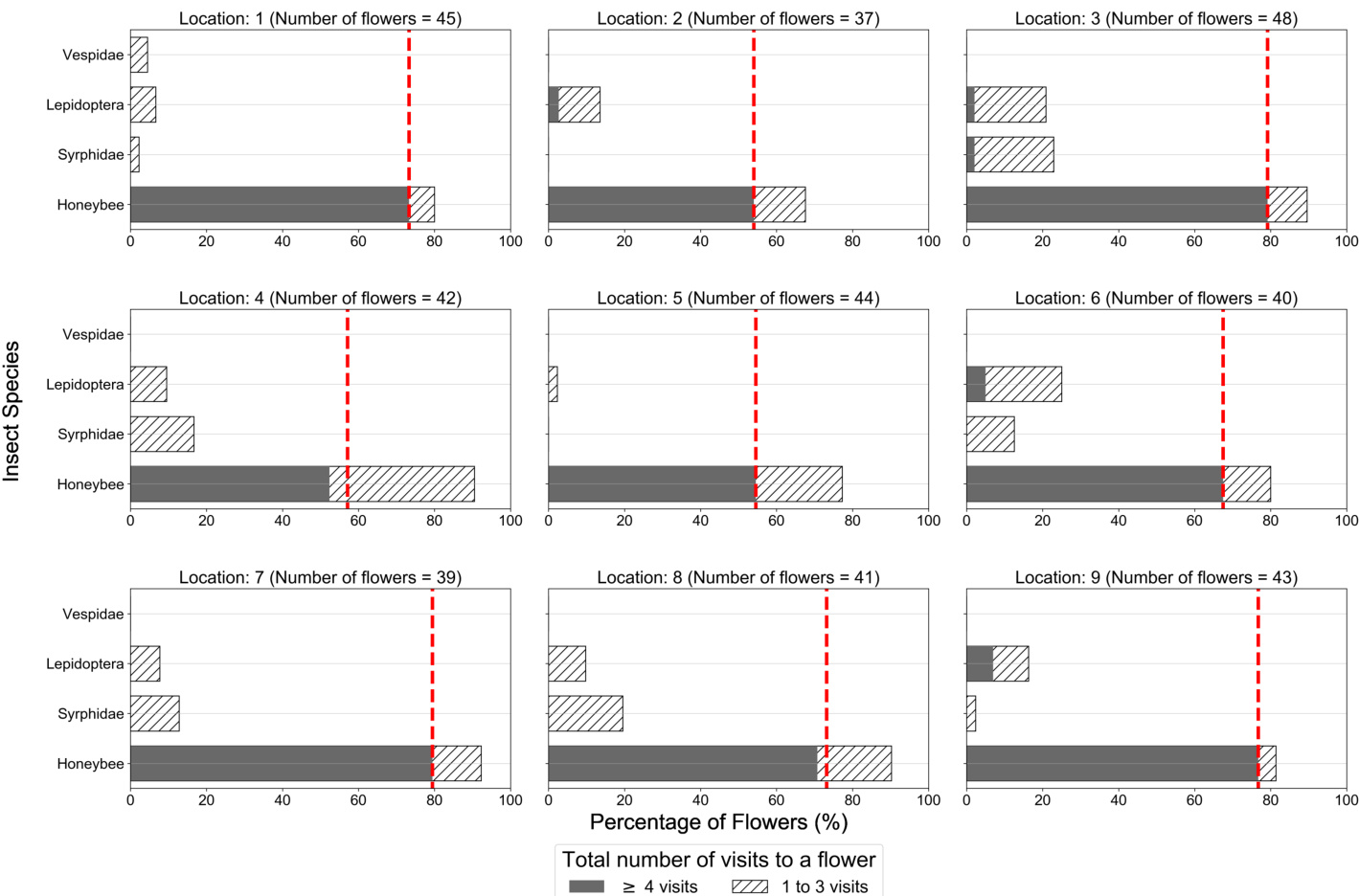
The authors evaluated a computer vision system for monitoring insect behavior and pollination on a commercial strawberry farm, focusing on the frequency of flower visits by different insect species across multiple locations. Results show that honeybees were the dominant pollinators, contributing significantly to the proportion of flowers receiving at least four visits, which is considered necessary for effective fertilization. Other insect types, including wasps and hover flies, had lower visitation rates and contributed less to pollination, with wasps rarely visiting flowers despite being present in the system. Honeybees were the primary contributors to flower visits, with a majority of flowers receiving the minimum four visits required for fertilization. Other insect species such as wasps and hover flies had significantly lower visitation rates and contributed less to pollination. The system enabled spatial analysis of pollination levels across different farm locations, highlighting variations in pollinator effectiveness.
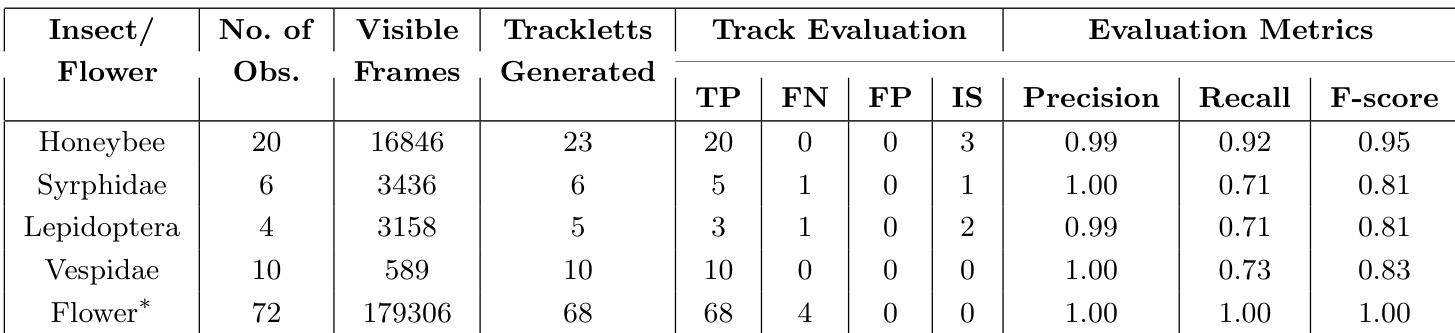
The authors evaluated a computer vision system for monitoring insect behavior and pollination on a commercial strawberry farm, focusing on the detection and tracking of four insect types. The system achieved high precision and recall for honeybees, while performance varied for other insect types due to factors like movement speed and visibility. Results showed that honeybees were the primary contributors to flower visits, with over 67% of flowers receiving the minimum number of visits required for fertilization. The system demonstrated strong detection metrics for flowers and consistent tracking performance across different test videos. The system achieved high detection accuracy for honeybees and flowers, with precision and recall values close to 1.0 across multiple test videos. Tracking performance varied among insect types, with lower recall and F-scores for Syrphidae, Lepidoptera, and Vespidae due to challenges like fast movement and occlusion. Honeybees were the dominant pollinators, contributing to over 67% of flowers receiving the minimum number of visits required for fertilization, while other insect types had minimal impact.
The authors evaluated a computer vision system for tracking insects and analyzing their behavior in a commercial strawberry farm setting. The system was tested on video data to assess detection accuracy for different insect types and their interactions with flowers, with results showing high precision and recall for honeybees and lower performance for other species due to factors like movement speed and visibility. The analysis revealed that honeybees were the primary contributors to flower visits, significantly surpassing other insect types in meeting the threshold for effective pollination. The system achieved high detection accuracy for honeybees, with high precision and recall, while other insect types showed lower recall due to challenges like fast movement and visibility. Honeybees were the dominant pollinators, contributing the majority of flower visits and significantly exceeding the threshold for effective pollination. The system enabled spatial analysis of insect behavior, revealing that honeybees were the most effective pollinators compared to other insect types, which had minimal contributions to flower visits.
The authors evaluated a computer vision system deployed on a commercial strawberry farm to track four insect species and quantify their flower visitation patterns. The experiments validated the model’s detection capabilities across different species while assessing their relative contributions to effective pollination. Results indicated that honeybees were the dominant pollinators, successfully driving the majority of flowers past the visitation threshold required for fertilization. In contrast, other tracked species contributed minimally to pollination outcomes, demonstrating the system’s capacity to accurately map spatial pollination dynamics and confirm the critical ecological role of honeybees in this agricultural setting.