Command Palette
Search for a command to run...
Please provide the title you would like me to translate.
Please provide the title you would like me to translate.
المعرفة الأساسية للتعامل مع بيانات السلاسل الزمنية
الملخص
Please provide the title and abstract you would like me to translate.
One-sentence Summary
This framework infers individual following strategies from coordinated movement time series by distinguishing between local-agreement-system and dictatorship-like strategies, outperforming state-of-the-art group-level classification methods across simulated and real-world fish and baboon datasets, resolving complex mixed strategies in simulations, and generalizing to arbitrary real-valued sequences.
Key Contributions
- A computational framework is introduced to solve the Coordination Strategy Inference Problem, decoding individual decision-making rules from collective movement time series.
- The methodology distinguishes whether each agent employs a local-agreement-system, a dictatorship-like rule, or an autoregressive strategy, addressing the methodological gap of prior approaches that only classify group-level coordination models.
- Evaluation on simulated benchmarks alongside real-world fish school and baboon troop datasets demonstrates high accuracy in identifying dominant and mixed strategies, while outperforming the FLICA framework on group-level coordination model classification.
Introduction
Understanding how groups coordinate movement decisions is essential for studying collective behavior in nature and designing multi-agent systems, yet prior methodologies can only classify group-level coordination models or analyze pairwise relationships. These existing approaches fail to identify the specific strategy each individual employs, leaving a critical gap in understanding how individual decision-making mechanisms combine to produce coordinated group behavior. The authors leverage time series data to formalize and solve the Coordination Strategy Inference Problem by introducing a framework that detects coordination intervals, evaluates candidate strategies, and accurately predicts whether each agent relies on local agreement or dictatorship-like mechanisms. Validated on simulated and real-world animal movement data, the method outperforms existing group-level classifiers and generalizes to arbitrary numerical time series.
Dataset
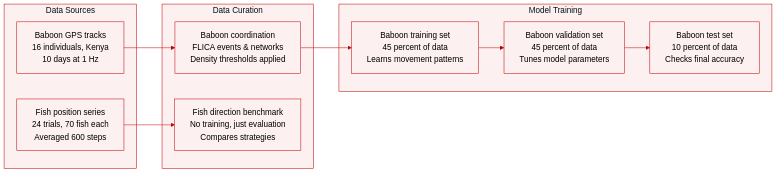
- Dataset Composition and Sources: The authors use two distinct animal movement datasets to evaluate their framework. The first records wild olive baboon troop movements in Kenya via GPS collars, while the second captures 2D position time series from controlled golden shiner fish experiments.
- Subset Details:
- The baboon subset contains 2D latitude and longitude trajectories for 16 individuals tracked over 10 days at 1 Hz (7 a.m. to 7 p.m.). Each individual record spans 419,095 time steps.
- The fish subset comprises 24 experimental trials, each tracking 70 fish in 2D space. Every trial averages 600 time steps and includes 10 trained agents that navigate toward a feeding site while the group follows. Individual identities are not tracked across different trials.
- Processing and Metadata Construction: For the baboon data, the authors extract coordination events using the FLICA algorithm, applying network density thresholds at the 25th, 50th, 75th, and 99th percentiles. They define a 240 time step window for coordination events and a 60 time step window for dynamic following networks. Because the fish dataset lacks cross-trial identity metadata, the authors skip model training and instead construct a direction prediction evaluation pipeline that compares an informed strategy against a random baseline using a custom risk function.
- Model Usage and Evaluation Splits: The baboon dataset is partitioned using 10-fold cross-validation, allocating 45 percent for training, 45 percent for validation, and 10 percent for testing. This split supports next-movement direction prediction and allows the authors to test hypotheses about latent coordination strategies. The fish dataset serves strictly as an evaluation benchmark, where the authors report the distribution of direction prediction errors across all agents at each time step to validate strategy performance comparisons.
Method
The framework for inferring coordination strategies operates through a two-stage process: model fitting and model selection, designed to determine the underlying strategies that agents use to achieve collective movement. The overall workflow begins with a set of time series data representing the states of n individuals, where each state is defined as a direction in a Euclidean space. The input to the system consists of this set of time series and a collection of candidate strategy functions H={f1,…,fm}, which are used to model the agents' behavior. The output is a set of optimal support vectors for each individual, indicating the mixture of candidate strategies that best explains their observed movement.
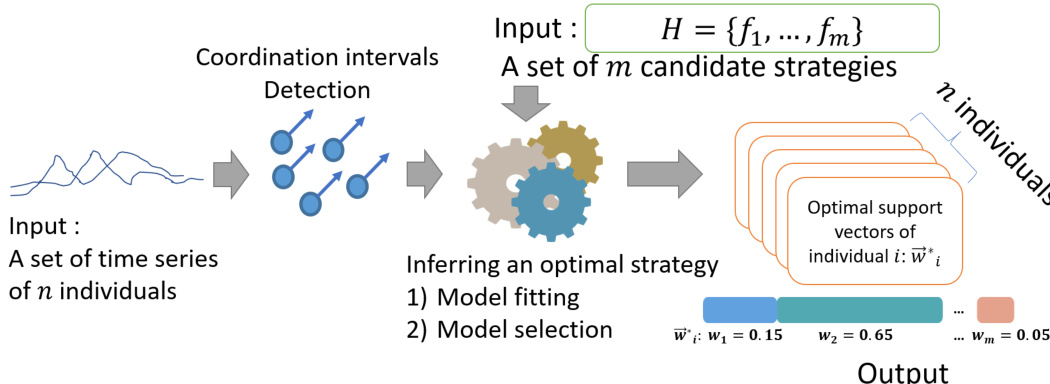
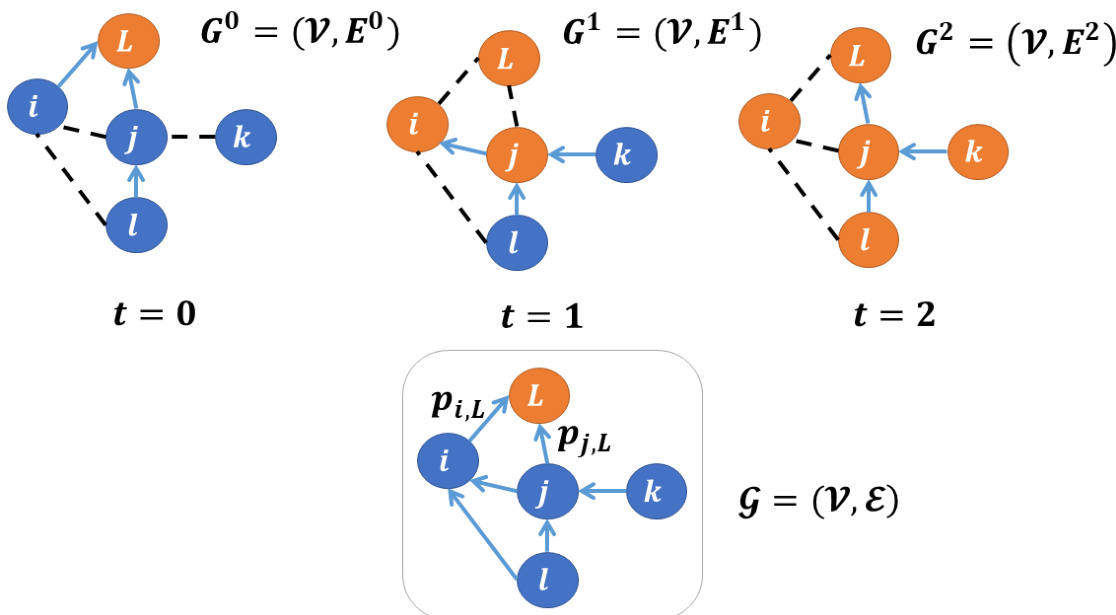
The first stage, model fitting, involves estimating the parameters of the candidate strategies using training data. This process starts by detecting coordination intervals within the input time series, which are periods where the group exhibits coordinated behavior. From these intervals, a dynamic following network is inferred, capturing the temporal dependencies between agents. This network is then aggregated and pruned based on a global-leadership ranking to form a directed acyclic graph (DAG) probabilistic network G, which represents the underlying social structure of the group. This network is crucial for the Hierarchical Model (HM) strategy, which models agents as following a leader or a set of specific individuals with probabilistic weights. For each agent i and time step t, the HM strategy function fHM′(St−1,i) predicts the next state as a weighted average of its own previous state and the states of its followers, as defined by the edges in G. The Local Reversible Agreement (LRA) strategy, in contrast, relies on the physical proximity of agents. It predicts the next state of agent i by averaging the states of its neighbors in a Delaunay triangulation of the agents' positions at time t−1, thereby capturing a behavior where individuals follow their immediate physical neighbors. The third candidate strategy, the Autoregressive (AR) model, assumes that an agent's movement is based solely on its own past states, independent of its neighbors. The model fitting stage combines these three strategies into a mixed strategy function, fmix(a,w), where a=(Pt,St−1,i) and w=[w1,w2,w3]T is a support vector representing the weight of each strategy. The goal is to find the optimal support vector wi∗ for each agent i by minimizing a risk function, which is defined as the sum of squared errors between the predicted and actual directions. This optimization is constrained by the requirement that the weights sum to one and that they lie within a specified threshold interval, which can be used to enforce prior beliefs about the likelihood of certain strategies.
The second stage, model selection, is used to select the best-fitting model from a set of candidates generated during the fitting stage. This is achieved by evaluating the models on a separate validation dataset. The process involves varying a threshold vector κ to generate a set of models Φi for each agent i. Each model is defined by a support vector wi∗ and a corresponding threshold κ. The optimal support vector wi∗ is then selected as the one that minimizes the risk on the validation data. The final inference for each agent is based on the relative weights of the strategies in the optimal support vector. If the weight for the HM strategy is the highest, the agent is inferred to follow a hierarchical structure. If the weight for the LRA strategy is the highest, the agent is inferred to follow its physical neighbors. If the weight for the AR strategy is the highest, the agent is inferred to move independently. If multiple strategies have significant weights, a mixed strategy is inferred. This two-stage framework allows for the robust inference of individual-level coordination strategies from time-series data, providing a comprehensive approach to understanding the mechanisms behind collective movement.
Experiment
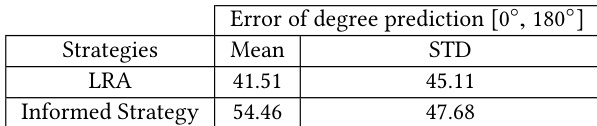
The proposed framework was evaluated on simulated datasets and two biological motion recordings to validate its capacity to infer individual-level coordination strategies and classify group-level models. Simulations demonstrated that the approach accurately recovers both homogeneous and heterogeneous strategy distributions while outperforming pure strategy baselines and avoiding overfitting. Application to biological data revealed that baboons preferentially follow specific individuals rather than spatial neighbors, whereas fish coordinate by tracking immediate local neighbors, both findings aligning with established behavioral observations. Furthermore, the method achieved superior group-level classification compared to the state-of-the-art FLICA framework, confirming its robustness in capturing complex coordination dynamics.
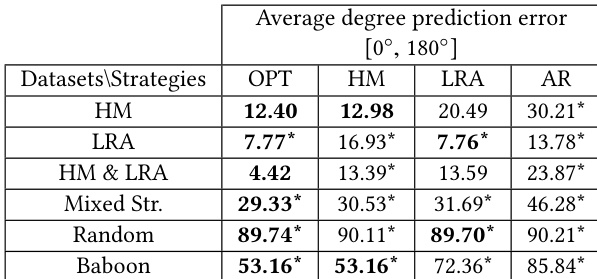
The authors compare different strategies for predicting movement direction in simulated and biological datasets. Results show that the proposed framework outperforms baseline strategies in terms of prediction accuracy, with the optimal strategy achieving the lowest error in most cases. The framework is also shown to effectively distinguish between different coordination models, particularly in complex mixed-strategy scenarios. The proposed framework achieves lower prediction error compared to baseline strategies in simulated datasets. The framework performs better than existing methods in classifying group-level coordination models. The approach accurately infers individual-level strategies in mixed strategy settings, demonstrating its effectiveness in complex scenarios.
The authors evaluate their framework for inferring coordination strategies in simulated and biological datasets by comparing prediction errors across different strategies. Results show that their method outperforms baseline strategies in most cases, particularly in mixed and complex scenarios, and provides more accurate group-level classification than a state-of-the-art approach. The framework also identifies distinct behavioral patterns in animal movement data, such as baboons following specific individuals and fish following neighbors. The proposed framework achieves lower prediction error than baseline strategies in most simulated datasets, especially in mixed and complex cases. The framework outperforms the state-of-the-art method in group-level classification tasks, indicating better handling of heterogeneous strategies. Results from biological datasets suggest baboons follow specific individuals while fish follow their immediate neighbors, aligning with known behavioral patterns.
The authors evaluate their framework on simulated and biological datasets to infer individual-level coordination strategies. Results show that their approach accurately predicts the correct strategies in simulated data, outperforming existing methods, and reveals distinct behavioral patterns in baboon and fish movement. The framework successfully identifies mixed strategies and avoids overfitting, as demonstrated by consistent performance across different datasets. The framework accurately infers individual strategies in simulated datasets, outperforming baseline methods and detecting mixed strategies. In biological data, the framework reveals that baboons follow specific individuals while fish follow their neighbors, aligning with known behavioral patterns. The approach avoids overfitting by correctly identifying the absence of coordination in random movement data.
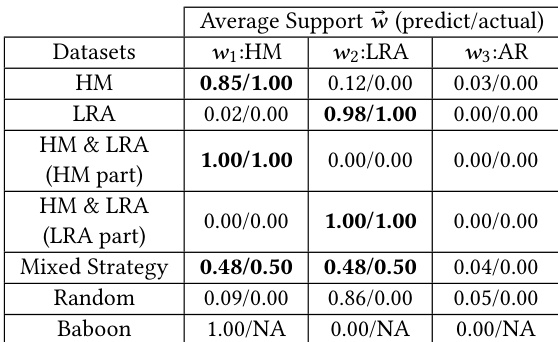
The authors evaluate their framework on simulated and biological datasets to validate its capacity for inferring individual coordination strategies and classifying group-level movement patterns. Experiments on controlled simulations demonstrate that the method reliably distinguishes complex mixed strategies and maintains robust generalization without overfitting. Analysis of real-world animal tracking data further validates the framework's practical utility, as it accurately recovers established ecological behaviors such as baboons following specific leaders and fish tracking immediate neighbors. Collectively, these results confirm that the approach effectively captures intricate coordination dynamics while outperforming existing methods across diverse and heterogeneous scenarios.