Command Palette
Search for a command to run...
إنجاز رائد في مجال التعلم الآلي لمعلومات الفيزياء! بنية GNN جديدة تُمكّن من التنبؤات الدقيقة للأنظمة الديناميكية المعقدة متعددة الأجسام، مما يُعزز مجالات الروبوتات والفضاء وعلوم المواد.

في السنوات الأخيرة، حقق الذكاء الاصطناعي إنجازات كبيرة في مجالات مثل التعرف على الصور ومعالجة اللغة الطبيعية، ولكنه لا يزال يواجه تحديات عديدة في نمذجة الأنظمة الفيزيائية المعقدة. وتندرج العديد من المشكلات الواقعية - مثل حركة المواد الجسيمية، وديناميكيات الجزيئات، وحركة الإنسان، ومحاكاة الأنظمة الميكانيكية - ضمن فئة أنظمة ديناميكيات الأجسام المتعددة. وتتميز هذه الأنظمة عادةً بتفاعلات بالغة التعقيد، ويجب أن تخضع بدقة لقوانين فيزيائية أساسية، مثل حفظ الزخم والطاقة.
يمكن لأساليب المحاكاة العددية التقليدية أن تصف هذه الأنظمة بدقة، لكنها غالباً ما تكون مكلفة حسابياً، خاصة عندما تكون هناك حاجة إلى عمليات محاكاة طويلة المدى أو أنظمة جسيمات واسعة النطاق، حيث يتم استهلاك الموارد الحسابية بكميات هائلة.في الوقت نفسه، في حين أن نماذج التعلم الآلي يمكنها تعلم العلاقات المعقدة من البيانات، فإنها غالباً ما تفتقر إلى القيود المفروضة على القوانين الفيزيائية، مما يؤدي إلى تراكم الأخطاء أو حتى تباعد النظام في التنبؤات طويلة المدى.
في ظل هذه الخلفية، أصبح التعلم الآلي في المعلومات الفيزيائية تدريجياً نقطة بحثية ساخنة.حظيت أساليب النمذجة الديناميكية القائمة على الشبكات العصبية الرسومية (GNNs) باهتمام واسع النطاق في السنوات الأخيرة. تستطيع الشبكات العصبية التوليدية (GNNs) تمثيل التفاعلات بين الجسيمات أو الأجسام الصلبة بشكل طبيعي: فالعقد تمثل الأجسام، والحواف تمثل التفاعلات. ولذلك، فهي مناسبة تمامًا لمحاكاة الأنظمة متعددة الأجسام. مع ذلك، غالبًا ما تفتقر الطرق القائمة على البيانات، مثل الشبكات العصبية التوليدية، إلى الاتساق الفيزيائي، وقابلية التفسير، والقدرة على التعميم.
لحل هذه المشكلة،اقترح باحثون من المعهد الفدرالي السويسري للتكنولوجيا في لوزان (EPFL) بنيةً جديدةً لشبكة عصبية رسومية (GNN) تعتمد على الفيزياء، تُسمى DYNAMI-CAL GraphNet، تجمع بين قدرات التعلم لشبكات GNN والتحيزات الاستقرائية القائمة على الفيزياء. ومن خلال تضمين قوانين حفظ الزخم الخطي والزخم الزاوي مباشرةً في بنية النموذج، يتم ضمان هذين الحفظين بشكلٍ صريح.
تُظهر النتائج التجريبية أن برنامج DYNAMI-CAL GRAPHNET يُقدم مزايا كبيرة في المجالات التي تتطلب نمذجة دقيقة وقابلة للتفسير وفي الوقت الفعلي للأنظمة الديناميكية المعقدة متعددة الأجسام، مثل الروبوتات وهندسة الطيران والفضاء وعلوم المواد. وبفضل توفيره لقدرات تنبؤ متسقة فيزيائيًا وقابلة للتطوير، تتوافق مع قوانين الحفظ الأساسية، يُمكن لهذا البرنامج استنتاج القوى والعزوم في الأنظمة مع التعامل بكفاءة مع التفاعلات غير المتجانسة والقوى الخارجية.
تم نشر نتائج البحث ذات الصلة، بعنوان "شبكة عصبية بيانية مستنيرة بالفيزياء تحافظ على الزخم الخطي والزاوي للأنظمة الديناميكية"، في مجلة Nature Communications.
أبرز الأبحاث:
* في بنية GNN المتغيرة، يقوم DYNAMI-CAL GRAPHNET بدمج حفظ الزخم الخطي والزخم الزاوي بشكل مباشر في بنية الشبكة من خلال فرض قانون نيوتن الثالث على مستوى التفاعلات الزوجية الداخلية.
توفر هذه الطريقة تنبؤات متسقة فيزيائياً حتى في التفاعلات المعقدة غير المركزية والتأثيرات المبددة، وهي قابلة للتطبيق على مجموعة متنوعة من الأنظمة.
تتمتع هذه البنية بقيمة كبيرة في تصميم أنظمة التحكم، وتحسين العمليات الميكانيكية، وتحليل السلوك الديناميكي للأنظمة الطبيعية والهندسية.
عنوان الورقة:
https://www.nature.com/articles/s41467-025-67802-5
تابع حسابنا الرسمي على WeChat وأجب بكلمة "Physics GNN" في الخلفية للحصول على ملف PDF كامل.
أربعة أنواع متميزة من مجموعات بيانات النظام الديناميكي
وللتحقق من عمومية النموذج، أجرى فريق البحث تجارب على أربع مجموعات بيانات متميزة للأنظمة الديناميكية.تغطي مجموعات البيانات هذه مجموعة متنوعة من السيناريوهات، بدءًا من المحاكاة الفيزيائية وصولًا إلى بيانات العالم الحقيقي. ومن بينها:
مجموعة بيانات تصادم الجسيمات ذات 6 درجات حرية
قام فريق البحث ببناء نظام تصادم جسيمات بست درجات حرية. في هذا النظام، لا يمكن لكل جسيم أن يتحرك انتقالاً فحسب، بل يمكنه أيضاً أن يدور، وبالتالي يمتلك ست درجات حرية (6-DoF).
تتكون مجموعة بيانات التدريب من 5 مسارات، يحتوي كل منها على 60 كرة متطابقة.تُحصر هذه الكرات في حيز مغلق مستطيل الشكل. تُحدد السرعات الخطية الابتدائية عشوائيًا وتُؤخذ عينات منها بانتظام ضمن نطاق 1-2 متر/ثانية. يحتوي كل مسار على 1500 خطوة زمنية بفترة أخذ عينات بيانات تبلغ 10⁻⁴ ثانية، بينما تبلغ الخطوة الزمنية للمحاكاة الفيزيائية الأساسية 10⁻⁶ ثانية. في كل خطوة زمنية، تُسجل معلومات الحالة التالية لكل كرة: الموضع، والسرعة الخطية، والسرعة الزاوية.
تحتوي مجموعة التحقق على مسار واحد لم يُستخدم في التدريب. ويتكون النظام أيضًا من 60 كرة و200 خطوة زمنية.لا يزال مقدار سرعته الأولية ضمن نطاق التدريب، لكن اتجاه السرعة يختلف عن بيانات التدريب، وهو ما يستخدم لاختبار قدرة النموذج على التعميم.
تم إعداد مجموعة اختبار الاستيفاء بنفس طريقة مجموعة التحقق، ولكن طول المسار هو 500 خطوة زمنية.يستخدم لتقييم قدرة النموذج على التنبؤ على المدى الطويل ضمن نطاق توزيع التدريب.
نظام الأجسام المتعددة المقيد
بالنسبة لمسائل ديناميكيات الأجسام المتعددة المقيدة الكلاسيكية، من أجل تقييم مدى قابلية تطبيق النموذج في أنواع التفاعل المختلطة والأنظمة المقيدة هيكليًا،استخدم الباحثون مجموعة بيانات Constrained N-Body المقترحة في الأدبيات.تعمل مجموعة البيانات هذه على توسيع محاكاة الجسيمات المشحونة ثلاثية الأبعاد التي اقترحها توماس كيبف وآخرون من خلال إدخال قيود كاملة في شكل عصي صلبة ومفصلات لبناء النظام.
بيانات التقاط حركة الإنسان
تأتي مجموعة البيانات الثالثة من بيانات الحركة البشرية في العالم الحقيقي من قاعدة بيانات التقاط الحركة بجامعة كارنيجي ميلون.تسجل هذه المجموعة من البيانات التغيرات الموضعية ثلاثية الأبعاد لمفاصل الهيكل العظمي البشري أثناء الحركة، كالمشي والجري والقفز. في هذه التجربة، اختار الباحثون بيانات "المشي" لأحد الأشخاص، وقاموا بنمذجة مفاصل الهيكل العظمي البشري كهيكل بياني، حيث تمثل العقد المفاصل، وتمثل الحواف وصلات العظام. استُخدمت هذه التجربة بشكل أساسي للتحقق من أداء النموذج في أنظمة الحركة المعقدة في العالم الحقيقي.
ديناميكيات البروتين الجزيئية
تأتي مجموعة البيانات الأخيرة من عمليات محاكاة ديناميكيات الجزيئات البروتينية.استخدم الباحثون مجموعة بيانات مسار التوازن لـ apo adenosine kinase (AdK)، والتي تم الحصول عليها عبر مجموعة أدوات MDAnalysis، والتي تسجل الحركة على المستوى الذري للبروتينات في بيئة من جزيئات الماء والأيونات الصريحة.
DYNAMI-CAL GraphNet: بنية GNN جديدة تعتمد على المعلومات الفيزيائية
تتمثل الفكرة الأساسية لشبكة DYNAMI-CAL GraphNet في دمج قوانين الحفظ الفيزيائية مباشرةً في بنية الشبكة العصبية. ويظهر تصميمها العام في الشكل أدناه.يمكن تقسيمها إلى ثلاث مراحل رئيسية:
① تمثيل تخطيطي؛
② مخطط التحويل القياسي-المتجهي مع الحفاظ على الزخم الخطي والزخم الزاوي؛
③ نقل الرسائل المكانية والزمانية.
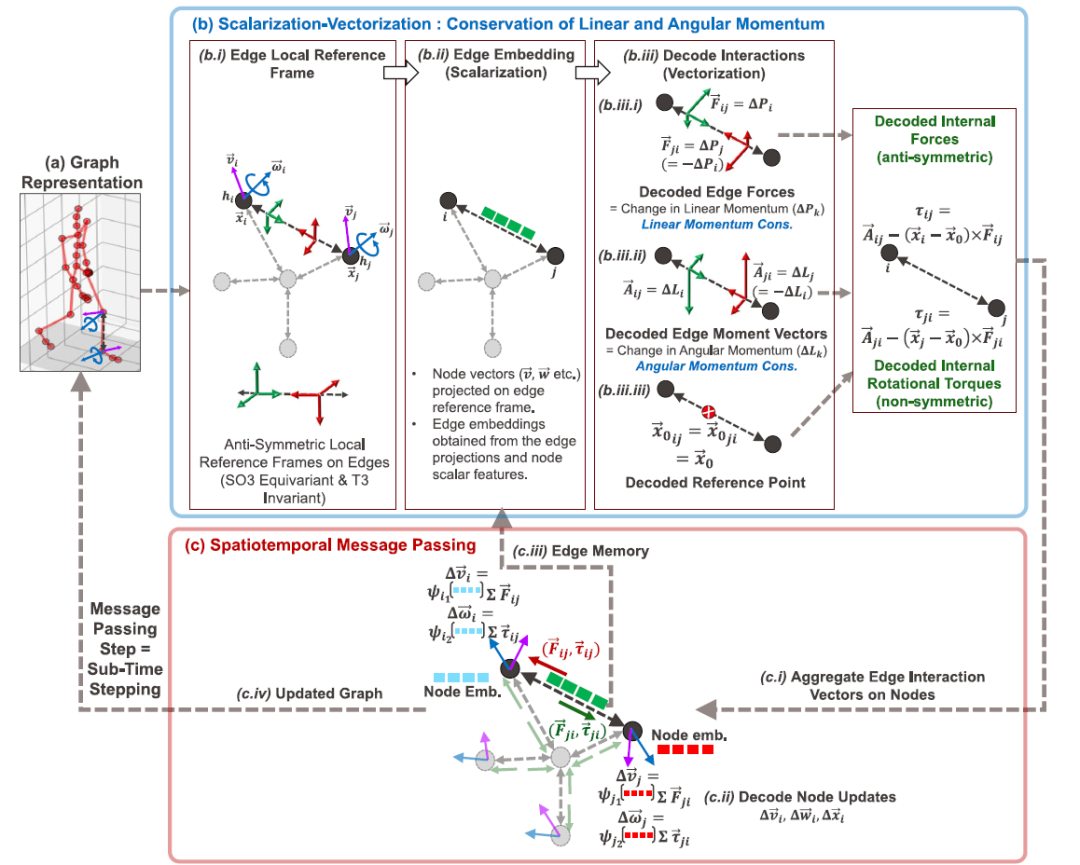
المرحلة الأولى: تمثيل الرسم البياني
أولاً، قام الباحثون بتمثيل النظام متعدد الأجسام على شكل رسم بياني: تمثل العقد الكائنات أو الجسيمات، وتمثل الحواف التفاعلات بين الكائنات.تحتوي كل عقدة على ميزات متعددة، مثل الموضع والسرعة والسرعة الزاوية وخصائص الجسم (الكتلة والشحنة وما إلى ذلك)؛ بينما تمثل الحواف المواضع النسبية وعلاقات التفاعل بين جسمين.
المرحلة الثانية: التحويل من القياس إلى التوجيه
* التحويل إلى مقياس
خلال مرحلة التحويل إلى قيم عددية، يحوّل النموذج معلومات المتجهات للعقد والحواف إلى تمثيلات عددية عالية الأبعاد. ومن الابتكارات الرئيسية تخصيص نظام إحداثيات مرجعي متعامد محلي لكل حافة، يتميز بخصائص منها: التباين مع الدوران ثلاثي الأبعاد SO(3)، والثبات مع الإزاحة T(3)، والتناظر العكسي عند تبديل مواقع العقد. عمليًا، يعني هذا أنه عند عكس اتجاه الحافة، تتغير إشارات متجهات الأساس الثلاثة، مما يضمن استيفاء جميع عمليات الإسقاط وحسابات التفاعل اللاحقة لشرط التناظر العكسي.
في خطوة التحويل إلى قيم قياسية، تُسقط خصائص متجهات العقد (مثل السرعة والسرعة الزاوية) على نظام الإحداثيات المحلي لهذه الحواف للحصول على مركبات قياسية. ثم تُدمج هذه القيم القياسية مع خصائص قياسية أخرى للعقد لتشكيل تمثيلات للحواف لا تتأثر بترتيب العقد.تقوم هذه الطريقة بتشفير كل من المعلومات الاتجاهية والكمية حول التفاعلات المحلية مع الحفاظ على تناظر النظام.
* تحويل إلى متجه
خلال مرحلة التحويل إلى متجهات، يقوم النموذج بفك تشفير القوى الداخلية وعزوم الدوران من متجهات تضمين الحواف. ثم يتم تجميع هذه القوى على العقد لتحديث السرعة الخطية والسرعة الزاوية وموقع الجسيمات.لأن تصميم النموذج يفرض أن القوى والعزوم تحقق التناظر العكسي، فإن النظام يحقق بشكل طبيعي حفظ الزخم الخطي والزخم الزاوي.
المرحلة الثالثة: تبادل الرسائل المكانية والزمانية
بعد حساب القوى والعزوم الداخلية المتسقة فيزيائيًا على كل حافةسيقوم النموذج بتنفيذ آلية تمرير الرسائل المكانية والزمانية لشبكة DYNAMI-CAL GRAPHNET.
أولًا، تُجمع القوى الداخلية وعزوم الدوران المُفكَّكة على مستوى الحواف عند العقد المتصلة للحصول على القوة المحصلة وعزم الدوران المحصل على كل عقدة. ثم تُضرب هذه المتجهات بمعاملات مُستخرجة من تضمين العقدة القياسي لتحديث السرعة الخطية والزاوية للعقد. بعد ذلك، يُحسب الموضع المُحدَّث باستخدام تكاملات أويلر الضمنية. تُشكِّل هذه العملية طبقة تمرير الرسائل في شبكة الرسم البياني الديناميكية (DYNAMI-CAL GRAPHNET).
في الجولة التالية من ترميز الحواف، يتم الاحتفاظ بهذا التمثيل المتطور تدريجياً كذاكرة كامنة لكل حافة، مما يُمكّن النموذج من تحقيق استدلال مكاني زمني حقيقي.
يُمكّن هذا التصميم برنامج DYNAMI-CAL GRAPHNET من التقاط السلوك الديناميكي للنظام عبر نطاقات زمنية متعددة مع الحفاظ على تحيز استقرائي قائم على أسس فيزيائية في كل خطوة حسابية.
الاستنتاج التجريبي: تم تحسين الاستقرار وقدرة التعميم بشكل كبير.
قيّم الباحثون أداء DYNAMI-CAL GraphNet على أربع مهام معيارية، شملت أنظمة فيزيائية محاكاة وأخرى واقعية. وأظهرت التجارب على مجموعات بيانات متعددة تفوق DYNAMI-CAL GraphNet على الطرق الحالية في العديد من المقاييس.
معيار قياس التصادم الحبيبي ذو 6 درجات حرية
أُجريت تجربة تنبؤية بالتدحرج على حركات 6 درجات حرية لستين كرة داخل وعاء متوازي مستطيلات. يوضح الشكل أدناه مقارنة بين برنامجي DYNAMI-CAL GRAPHNET وGNS.
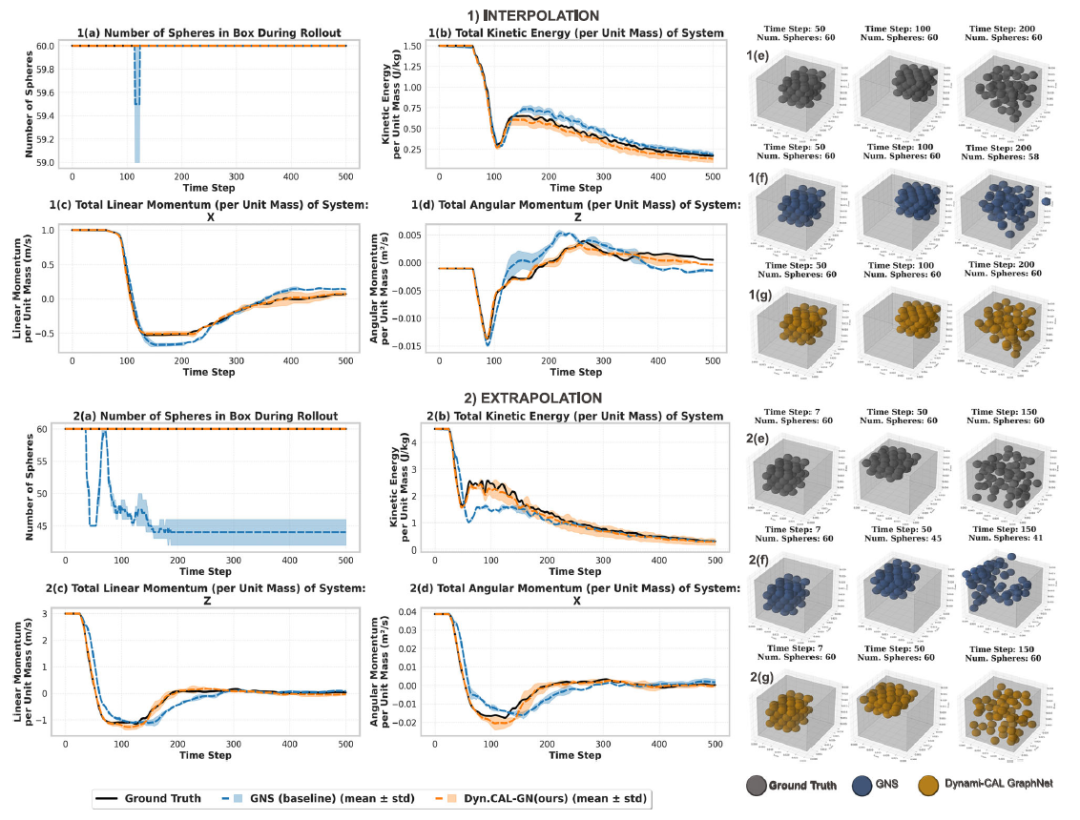
نجح برنامج DYNAMI-CAL GRAPHNET في الحفاظ على جميع الجسيمات، وتتبع بدقة اضمحلال الطاقة الحركية، وحافظ على تطور الزخم المتسق على مدى 500 خطوة تنبؤ، وأظهر الحد الأدنى من التباين عبر البذور العشوائية المختلفة.على النقيض من ذلك، ينحرف نموذج GNS مبكرًا في سيناريوهات الاستقراء ويُظهر هروب الجسيمات. ويعود ذلك إلى أنه في ظل ظروف الزخم العالي، تزداد سرعات التصادم، مما يتطلب حسابًا دقيقًا لقوى التلامس النبضية للحفاظ على قيود النظام. يفشل نموذج GNS في التعميم بشكل جيد، وحتى بالنسبة للجسيمات التي لا تهرب، فإن تنبؤاته تنحرف تدريجيًا عن السلوك الفيزيائي الفعلي.
تشير هذه النتائج إلى ما يلي:يُظهر برنامج DYNAMI-CAL GRAPHNET قدرة أكبر على المتانة والتعميم في نمذجة الأنظمة الديناميكية ذات 6 درجات حرية والمتبددة للطاقة والمتصلة بكثافة.
ديناميكيات الأجسام المتعددة المقيدة
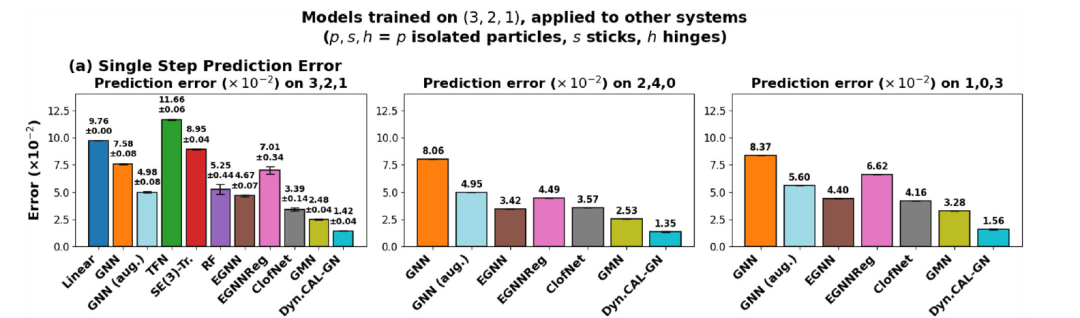
بشكل عام، يتفوق نموذج DYNAMI-CAL GRAPHNET على جميع النماذج الأساسية في مهام التنبؤ أحادية الخطوة ومتعددة الخطوات.
في الشكل (أ) أدناه، حقق نموذج DYNAMI-CAL GRAPHNET أقل خطأ في التنبؤ بخطوة واحدة عبر مختلف تكوينات الجذع، متفوقًا على نماذج GMN وEGNN وClovNet. لاحقًا، أدخل الباحثون تحسينات على الدوران والتحريك العشوائيين، مما أدى إلى تحسين أداء نموذج GNN غير المتكافئ بشكل ملحوظ وتقليص الفجوة مع النماذج المتكافئة. مع ذلك، حتى مع زيادة حجم البيانات والتناظر الهندسي الصريح للتلامس، ظل نموذج GNN (المُحسّن) متأخرًا عن أبسط النماذج المتكافئة، وهما EGNN وDYNAMI-CAL GRAPHNET، في جميع تكوينات الاختبار.
وهذا يدل على أن:يظل التحيز الاستقرائي في البنية أمرًا بالغ الأهمية لتعميم الديناميكيات الفيزيائية المقيدة.
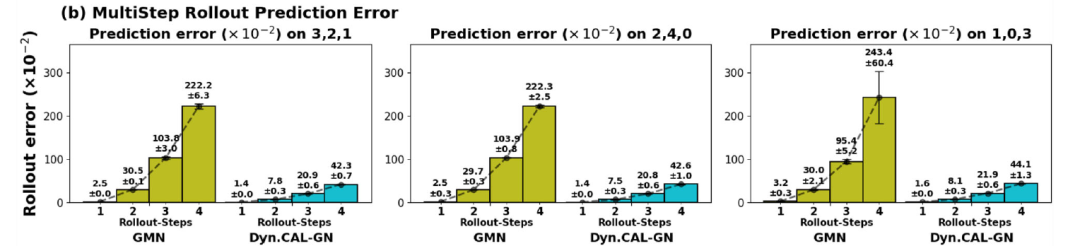
للتنبؤ بالتنفيذ متعدد المراحل، يقارن الشكل (ب) أدناه بين DYNAMI-CAL GRAPHNET وGMN. وتُظهر النتائج أن...في التنبؤ المتدحرج متعدد الخطوات بحد أقصى 4 خطوات (حيث الخطوة الواحدة = 10 إطارات = 1000 خطوة محاكاة)، يمكن لـ DYNAMI-CAL GRAPHNET الحفاظ على دقة تنبؤ مستقرة على المدى الطويل.سيتراكم خطأ التنبؤ الخاص بـ GMN تدريجياً ويزداد بشكل كبير بمرور الوقت.
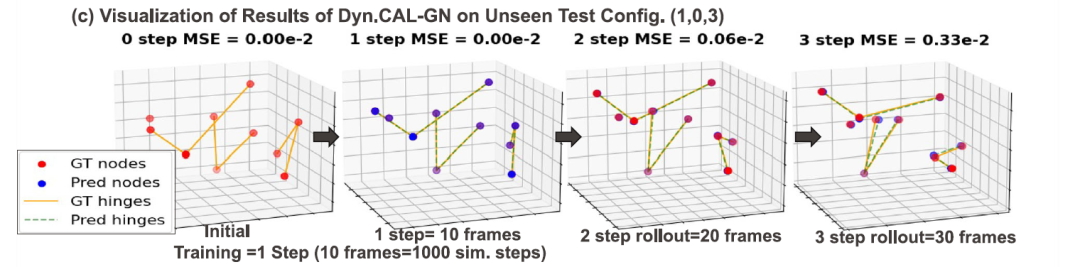
يوضح الشكل (ج) أدناه نتائج التنبؤ النوعي بالتدحرج على تكوين هيكلي غير مرئي (1، 0، 3). على الرغم من أن النموذج تم تدريبه بإشراف أحادي الخطوة فقط على بيانات ذات طوبولوجيات مختلفة،لا تزال الطريقة المقترحة قادرة على التقاط السلوك الديناميكي للأنظمة المقيدة بدقة.
التنبؤ بحركة الإنسان
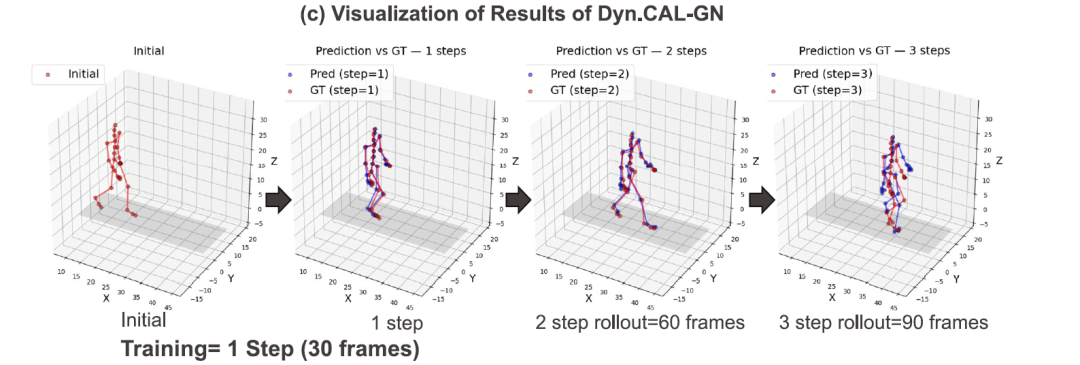
في بيانات التقاط حركة الإنسان، على الرغم من أن النموذج يستخدم فقط التدريب الخاضع للإشراف بخطوة واحدة، إلا أنه لا يزال بإمكانه الحفاظ على مسار مستقر في التنبؤ متعدد الخطوات، مما يدل على أن النموذج قد تعلم بنجاح البنية الديناميكية المكانية والزمانية لحركة الإنسان.
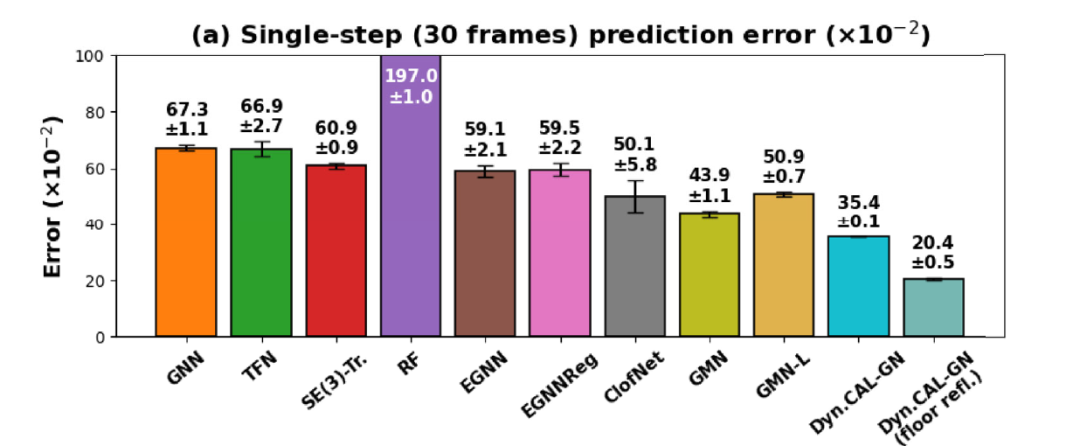
يوضح الشكل (أ) أدناه دقة التنبؤ بخطوة واحدة على معيار المشي البشري لجامعة كارنيجي ميلون. وتشير النتائج إلى ما يلي:يحقق برنامج DYNAMI-CAL GRAPHNET أقل نسبة خطأ بين جميع الطرق، متفوقًا على برنامج GMN. يستخدم برنامج GMN 19 مفصلاً لتمثيل الهيكل العظمي البشري ويفرض قيودًا من خلال 6 وصلات صلبة محددة يدويًا، ثم يفرض قيودًا من خلال وحدة حركية أمامية (FK) مصممة يدويًا.
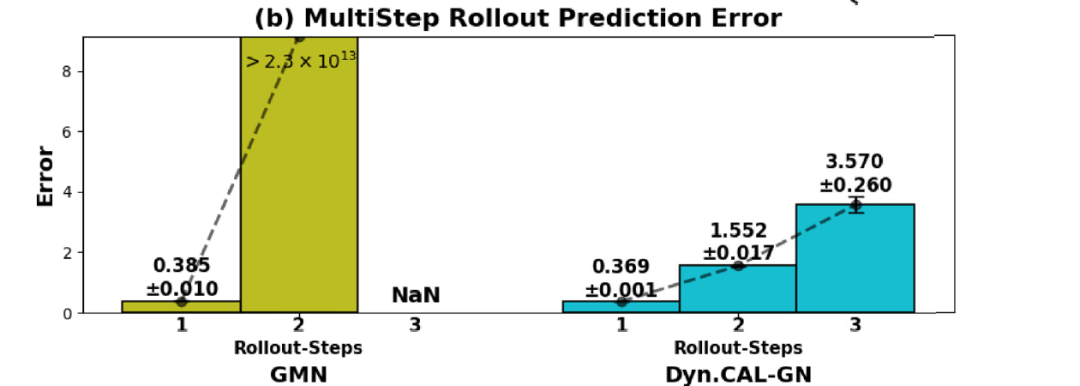
يوضح الشكل (ب) أدناه أنه على الرغم من تدريب النموذج باستخدام الإشراف أحادي الخطوة فقط،يحافظ نموذج DYNAMI-CAL GRAPHNET على دقة مستقرة في التنبؤ المتداول متعدد الخطوات، بينما يتباعد نموذج GMN بسرعة.
توضح النتائج النوعية في الشكل ج أدناه بشكل أكبر أن مسارات المفاصل المتوقعة مستمرة ومتسقة ومعقولة من الناحية الفيزيائية ومتسقة للغاية مع الحركة الفعلية، ويمكن أن تظل مستقرة في التنبؤ المستقبلي لـ 90 إطارًا.
ديناميكيات البروتين
وأخيرًا، قيّم الباحثون أيضًا قدرة النموذج على محاكاة ديناميكيات البروتين المعقدة الناتجة عن الاضطرابات الحرارية. وأظهرت النتائج ما يلي:يتمتع برنامج DYNAMI-CAL GRAPHNET بقدرات ممتازة في النمذجة الديناميكية في الأنظمة المعقدة والدقيقة مثل البروتينات.لا يقتصر الأمر على قدرته على التقاط الاهتزازات الميكروية فحسب، بل يمكنه أيضًا التنبؤ بالتغيرات التكوينية واسعة النطاق، بدقة تنبؤ تتجاوز دقة العديد من الطرق الأساسية.
من محاكاة الفيزياء إلى نماذج العالم للذكاء المجسد
مع تطور تقنيات الذكاء الاصطناعي، يكتسب اتجاه بحثي جديد زخمًا متسارعًا، ألا وهو الذكاء الاصطناعي المدمج. على عكس الذكاء الاصطناعي التقليدي، الذي يركز بشكل أساسي على معالجة النصوص أو الصور، يُشدد الذكاء الاصطناعي المدمج على التفاعل بين الأنظمة الذكية والعالم المادي الحقيقي. تُعد الروبوتات وأنظمة القيادة الذاتية ومعدات التصنيع الذكية من أهم تطبيقات الذكاء الاصطناعي المدمج. في هذه الأنظمة، لا يقتصر دور الأنظمة الذكية على إدراك بيئتها فحسب، بل يشمل أيضًا التنبؤ بالتغيرات البيئية ووضع استراتيجيات عمل مناسبة. وهذا يعني ضرورة امتلاكها القدرة على فهم السلوك الديناميكي للعالم المادي والتنبؤ به.
في السنوات الأخيرة، اقترح عدد متزايد من الباحثين مفهوم نموذج العالم. يشير نموذج العالم إلى نموذج داخلي قادر على محاكاة التغيرات الديناميكية في البيئة، مما يمكّن الأنظمة الذكية من التنبؤ بالمستقبل "في أذهانها". ومع ذلك، فإن بناء نموذج واقعي وموثوق للعالم ليس بالأمر السهل.في الواقع، عادةً ما تخضع حركة الأجسام لقوانين فيزيائية معقدة، مثل قانون حفظ الزخم، والاحتكاك، وديناميكيات التصادم. إذا لم يتمكن النموذج من تمثيل هذه القوانين بدقة، فقد تنحرف نتائج التنبؤ عن الواقع بسهولة في مراحل متعددة من الاستدلال.في هذا السياق، تقدم الشبكات العصبية للمعلومات الفيزيائية مثل DYNAMI-CAL GraphNet نهجًا تكنولوجيًا جديدًا لتطوير الذكاء المجسد.
بالإضافة إلى ذلك، أحرزت الصناعة تقدماً ملحوظاً في التنبؤ بكفاءة ودقة بتطور الأنظمة الفيزيائية المعقدة. غالباً ما تتطور هذه الأنظمة عبر نطاقات زمنية ومكانية متعددة، بينما تُدرَّب معظم نماذج التعلم عادةً على ديناميكيات قصيرة المدى فقط. وعند استخدامها للتنبؤات طويلة المدى، تتراكم الأخطاء في الأنظمة المعقدة، مما يؤدي إلى عدم استقرار النموذج.
وفي هذا السياق،قدّم فريق بحثي من مبادرة التعاون في الذكاء الاصطناعي متعددة التخصصات سلسلة من الأساليب الجديدة لمعالجة التحديات المذكورة أعلاه. واقترحوا نموذجًا أساسيًا يُسمى "والروس"، يحتوي على 1.3 مليار مُعامل، ويستخدم "المُحوّل" كبنية أساسية له، وهو مُوجّه بشكل رئيسي نحو ديناميكيات الأوساط المتصلة الشبيهة بالسوائل. يغطي نموذج Walrus تسعة عشر سيناريو فيزيائيًا شديد التنوع خلال مرحلة التدريب المسبق، تشمل مجالات متعددة منها الفيزياء الفلكية، وعلوم الأرض، وعلم الريولوجيا، وفيزياء البلازما، وعلم الصوتيات، وديناميكا الموائع الكلاسيكية. تُظهر النتائج التجريبية أن Walrus يتفوق على النماذج الأساسية السابقة في كلٍ من التنبؤات قصيرة المدى وطويلة المدى للمهام اللاحقة، ويُظهر أداءً أقوى في التعميم عبر توزيع بيانات التدريب المسبق بالكامل.
* عنوان الورقة: الفظ: نموذج تأسيسي متعدد المجالات لديناميكيات الأوساط المتصلة
* رابط الورقة:https://arxiv.org/abs/2511.15684
يُمكن لبناء نماذج الذكاء الاصطناعي في الفيزياء، من جهة، أن يُساعد العلماء على محاكاة الأنظمة المعقدة بكفاءة أكبر، مثل ديناميكيات الجزيئات، وعلوم المواد، ونماذج المناخ؛ ومن جهة أخرى، يُمكنه أيضاً تزويد الروبوتات الذكية بفهم أكثر واقعية للعالم. بمعنى آخر، قد يكون تمكين الذكاء الاصطناعي من فهم العالم المادي فهماً حقيقياً خطوةً مهمة نحو الذكاء الاصطناعي العام.
مراجع:
1.https://www.nature.com/articles/s41467-025-67802-5
2.https://mp.weixin.qq.com/s/fElxywueQ_an44rXkbjZ1A