Command Palette
Search for a command to run...
LightMover: 색상 및 강도 제어를 통한 생성형 조명 이동
LightMover: 색상 및 강도 제어를 통한 생성형 조명 이동
Gengze Zhou Tianyu Wang Soo Ye Kim Zhixin Shu Xin Yu Yannick Hold-Geoffroy Sumit Chaturvedi Qi Wu Zhe Lin Scott Cohen
초록
본 논문은 단일 이미지 내에서 물리적으로 타당한 조명 변화를 재렌더링 없이 구현할 수 있는 'LightMover' 프레임워크를 제안합니다. 본 프레임워크는 비디오 확산 (video diffusion) 사전 지식을 활용하여 조명 편집을 시각 토큰 공간에서의 시퀀스 - 투 - 시퀀스 예측 문제로 정식화합니다. 즉, 입력 이미지와 조명 제어 토큰 (light-control tokens) 을 기반으로 모델은 단일 뷰에서 조명의 위치, 색상, 세기를 조정함과 동시에 이에 따른 반사, 그림자, 감쇠 (falloff) 현상을 함께 생성합니다. 이러한 공간적 (이동) 및 외관적 (색상, 세기) 제어의 통합적 처리는 조작 정밀도와 조명 이해도를 모두 향상시킵니다. 또한, 공간 정보를 가진 토큰은 보존하면서 비공간적 속성은 압축적으로 인코딩하는 적응형 토큰 가지치기 (adaptive token-pruning) 메커니즘을 도입하여 제어 시퀀스 길이를 41% 단축하면서도 편집 충실도를 유지합니다. 프레임워크 훈련을 위해 원본 이미지와 장면 콘텐츠를 일치시키면서 다양한 조명 위치, 색상, 세기에 대응하는 대규모 이미지 쌍을 생성하는 확장 가능한 렌더링 파이프라인을 구축했습니다. LightMover 는 조명 위치, 색상, 세기에 대한 정밀하고 독립적인 제어를 가능하게 하며, 다양한 태스크에서 높은 PSNR 과 강력한 의미론적 일관성 (DINO, CLIP) 을 달성합니다.
One-sentence Summary
Researchers from Adelaide University, Adobe Research, and other institutions present LightMover, a framework leveraging video diffusion priors to enable physically plausible light manipulation in single images. By formulating editing as sequence-to-sequence prediction with adaptive token pruning, it achieves precise control over position, color, and intensity without scene re-rendering.
Key Contributions
- The paper introduces LightMover, a unified diffusion-based framework that formulates light editing as a sequence-to-sequence prediction problem to enable precise, independent control over light position, color, and intensity while generating physically plausible reflections and shadows.
- An adaptive token-pruning mechanism is proposed to compactly encode non-spatial attributes like color and intensity while preserving fine-grained spatial tokens, which reduces the control sequence length by 41% without compromising editing fidelity.
- A scalable physically-based rendering pipeline is developed to generate large-scale training data with varied illumination conditions, supporting a multi-task training strategy that achieves state-of-the-art performance in PSNR and semantic consistency across light manipulation tasks.
Introduction
Designing realistic lighting in a single image is critical for applications like virtual staging, yet existing methods struggle to provide precise control. Inverse-rendering pipelines are computationally expensive and ill-posed from a single view, while current Diffusion-based editors lack explicit spatial light movement or fail to propagate correct shadows and reflections. The authors introduce LightMover, a video-Diffusion framework that treats light manipulation as a sequence-to-sequence task to enable parametric control over position, color, and intensity. They leverage a novel adaptive token-pruning strategy to efficiently encode non-spatial attributes without inflating sequence length and utilize a scalable physically-based rendering pipeline to train the model on causal illumination effects.
Dataset
-
Dataset Composition and Sources: The authors combine a synthetic dataset generated via a Blender-based pipeline with a real-world dataset captured using mobile devices. The synthetic portion relies on 25 artist-designed indoor environments and 100 light source assets from Objectverse-XL, while the real portion consists of 106 indoor scenes photographed with synchronized triggering equipment.
-
Key Details for Each Subset:
- Synthetic Data: Generates approximately 32,000 data pairs by varying fixture placements, HDRI maps, and ambient-to-direct light ratios. Each scene features a light source animated along a smooth trajectory captured by ten virtual cameras to form multi-view motion pairs.
- Real Data: Contains 360 high-resolution photographs across 106 scenes, with each scene offering 3 to 4 lighting variations. This subset also includes background reference images where the light source is physically removed to support light insertion and removal tasks.
-
Model Usage and Training Strategy: The synthetic data provides scalable supervision for learning visual realism and physical consistency across light movement, color, and intensity. During training, the model applies additional post-processing perturbations to light intensity, hue, and ambient tone to create effectively unbounded variations. The real data complements this by offering ground truth for light movement and enabling specific objectives for light manipulation tasks.
-
Processing and Metadata Construction: The rendering pipeline decomposes each frame into two physically disentangled components: an ambient base image and a direct light contribution. These are rendered independently using Monte Carlo path-tracing and composited in linear RGB space. For the real dataset, the authors ensure physical consistency by capturing pairs where the only variable is the light source location, while the background images serve as metadata for removal and insertion objectives.
Method
The authors propose LightMover, a framework that repurposes a pre-trained video diffusion Transformer to handle light manipulation as a sequence-to-sequence prediction problem. The model treats various input conditions as pseudo video frames arranged sequentially, which are encoded by a VAE into latent tokens and jointly processed by the diffusion Transformer. As illustrated in the framework diagram, the input sequence consists of six distinct components: the Reference Image (Iref), an Object Frame (Iobj) containing the cropped target object, a Movement Map (Imove) encoding source and target bounding boxes, optional Color Control (Icolor), optional Intensity Control (Iintensity), and the noisy Output Frame (Xt). The Movement Map specifically utilizes RGB channels to denote the source region in Red and the target region in Green and Blue channels. Intensity control is quantified in photographic stops, where the illumination gain Gillum is calculated as Gillum=2SEV, with SEV representing the exposure adjustment.
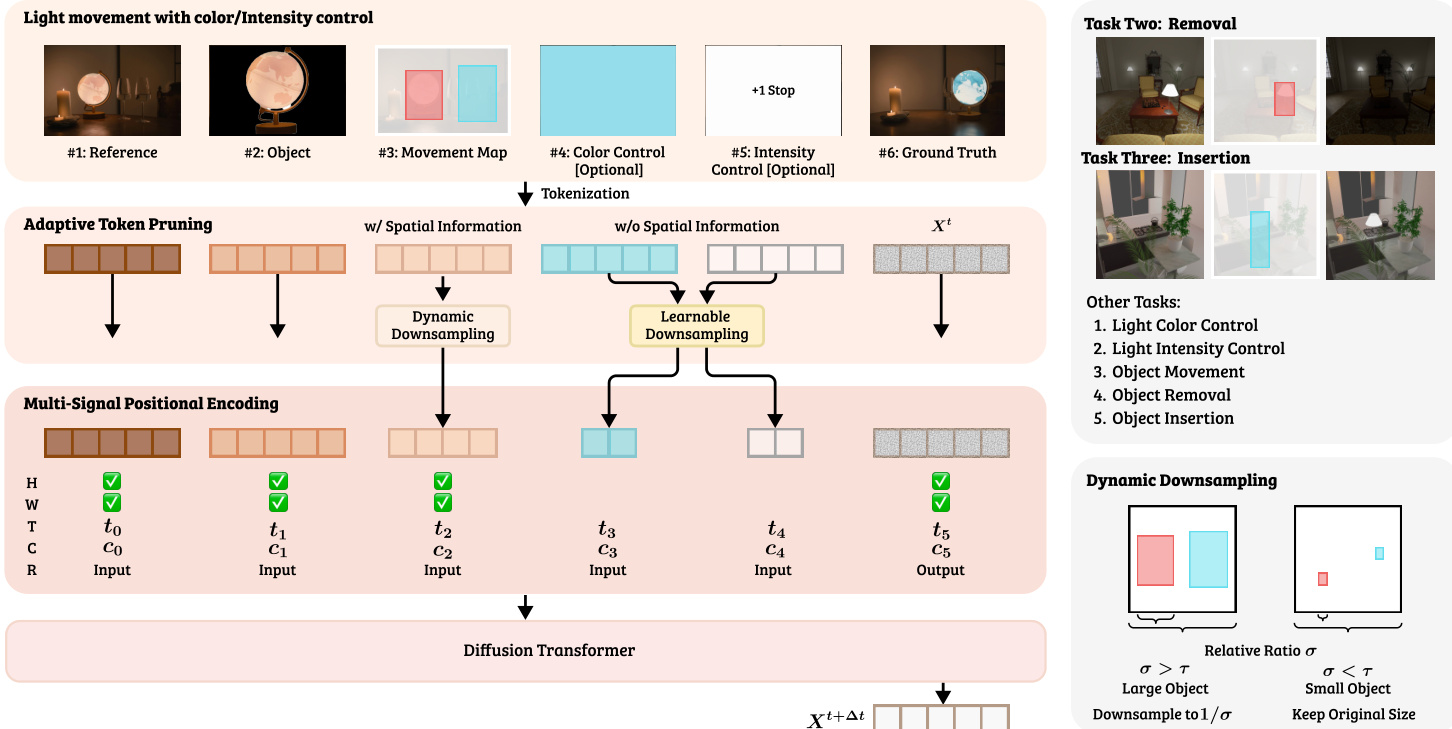
To ensure the Transformer correctly interprets these diverse inputs, the authors introduce a Multi-Signal Positional Encoding (MSPE) mechanism. This extends standard rotary positional embeddings by integrating four orthogonal subspaces: Spatial Encoding (W,H) for patch coordinates, Temporal Encoding (T) for sequence order, Condition-Type Encoding (C) to distinguish modalities, and Frame-Role Encoding (R) to separate inputs from the output. These components are projected and combined to enable joint reasoning over spatial alignment and condition interdependence.
To improve computational efficiency while maintaining generation fidelity, the authors employ an Adaptive Token Pruning mechanism. This module dynamically adjusts the number of latent tokens for each condition based on its spatial properties. For control signals with explicit spatial information, such as the Movement Map, a Spatially-Aware Pruning strategy downsamples tokens proportionally to the bounding box area ratio if the object is large. For non-spatial control frames like color and intensity, Learnable Downsampling is used, where the number of retained tokens is optimized jointly with the diffusion model. This approach reduces the average control sequence length by 41% without compromising generation quality.
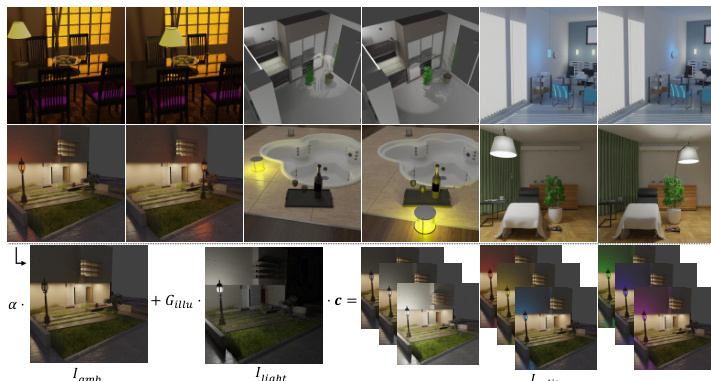
For training, the authors construct a scalable rendering pipeline to generate large-scale synthetic data that combines real captured data with systematic variations of lighting parameters. As shown in the figure below, this pipeline generates image pairs across varied light positions, colors, and intensities while keeping the scene content consistent. The relighting process is modeled parametrically, combining ambient and light components according to the formula Irelit=αIamb+GillumIlight⊙ct. The model is trained using a flow-matching objective, where noisy inputs are generated by linear interpolation and the model predicts the instantaneous velocity to minimize the loss L=Et,X0,X1[∥v(St,t;θ)[6]−Vt∥2].
Experiment
- LightMover is evaluated on real-world and synthetic benchmarks to validate its ability to perform precise light movement, insertion, and removal while maintaining physical plausibility.
- Comparisons against LLM-powered text-to-image models and object movement baselines demonstrate that LightMover achieves superior localization accuracy and better handles complex global illumination effects like shadows, reflections, and material-specific shading.
- The model shows strong generalization to joint control tasks involving simultaneous movement, color, and intensity changes, outperforming baselines in both single-attribute and multi-attribute scenarios.
- Ablation studies confirm that co-training with diverse synthetic tasks and using physically disentangled rendering augmentation are critical for disentangling light sources and learning global light composition.
- Experiments on token pruning strategies reveal that frame-based conditioning combined with adaptive downsampling is essential for balancing efficiency with the precision required for complex multi-attribute illumination control.
- Qualitative analysis verifies that the model accurately reproduces ground-truth shadow geometry, specular highlights, and reflection consistency without introducing visual artifacts.