HyperAI
Command Palette
Search for a command to run...
CHIP 産業用椅子 6D 姿勢推定データセット
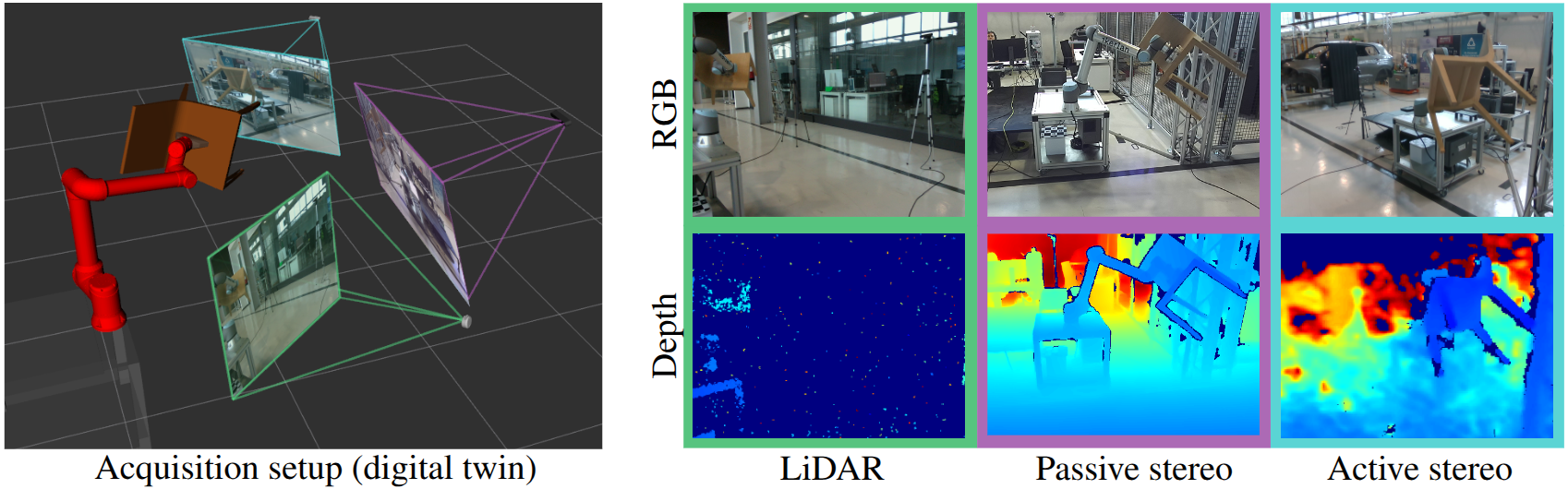
CHIPは、実世界の産業シナリオにおけるロボット操作のための6D姿勢推定データセットであり、FBK-TeVがIkerlan氏およびAndreu World氏と共同で2025年にリリースしました。関連論文には以下が含まれます。 CHIP: 産業環境における椅子の6D姿勢推定のためのマルチセンサーデータセットこれは、主に家庭用品や実験室環境に焦点を当てており、実際の産業条件が欠けている既存のベンチマークのデータギャップを埋めることを目的としています。 このデータセットには、7種類の構造と素材の椅子モデルを網羅した77,811枚のRGB-D画像が含まれています。これらの画像は、Intel RealSense D435、RealSense L515、StereoLabs ZEDの3種類のRGB-Dセンサーを使用して、実際の産業環境においてロボットアームによって取得されました。すべての椅子の6Dポーズアノテーションは、ロボットの運動学システムによって自動生成され、椅子の種類ごとに平均約11,115の高精度アノテーションが生成されました。データセットには、ロボットアームと人間のオペレーターによって引き起こされる中程度から重度のオクルージョンを含む、さまざまなレベルのオクルージョンを伴うシーンも含まれており、細粒度の干渉物体も含まれており、産業環境の複雑さを完全に反映しています。
引用
@inproceedings{nardon2025chip,
title={CHIP: A multi-sensor dataset for 6D pose estimation of chairs in industrial settings},
author={Nardon, Mattia and Mujika Agirre, Mikel and González Tomé, Ander and Sedano Algarabel, Daniel and Rueda Collell, Josep and Caro, Ana Paola and Caraffa, Andrea and Poiesi, Fabio and Chippendale, Paul Ian and Boscaini, Davide},
booktitle={British Machine Vision Conference (BMVC)},
year={2025}}
このデータセットはコミュニティユーザーによって提供されており、教育および情報提供のみを目的としています。著作権侵害に関わるコンテンツがある場合は、[email protected]までご連絡ください。速やかに確認し、削除いたします。