Command Palette
Search for a command to run...
Ensemble De Données De Localisation Et De Cartographie Simultanées TUM RGB-D
Date
Organisation
URL de publication
URL du document
Licence
CC BY 4.0
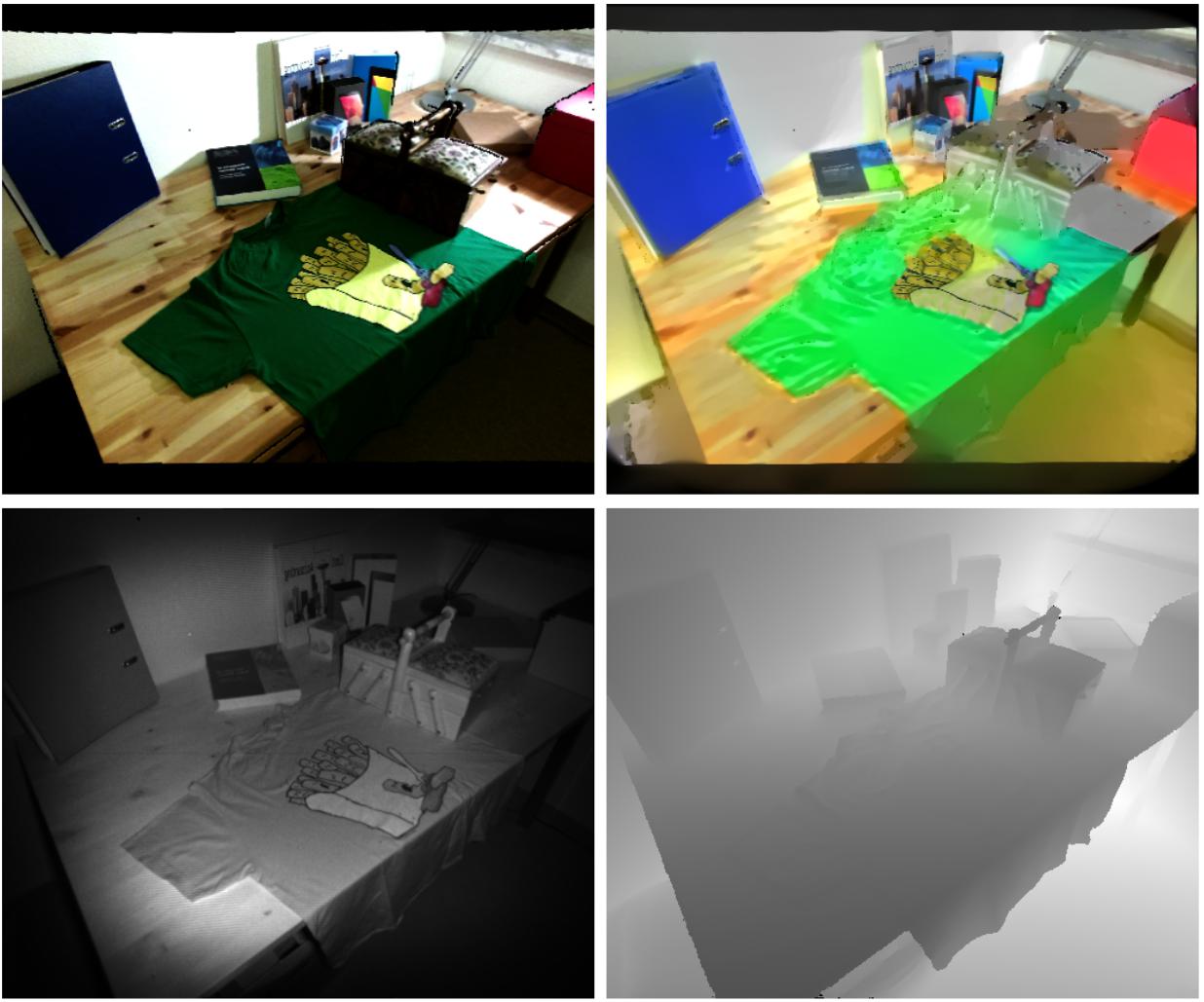
TUM RGB-D est un ensemble de données RGB-D contenant des images de couleur et de profondeur enregistrées par le capteur Microsoft Kinect le long de la trajectoire de vérité terrain du capteur. Les données ont été enregistrées à une fréquence d'images maximale (30 Hz) et à une résolution de capteur maximale (640 x 480 pixels). Les trajectoires de vérité terrain ont été obtenues par un système de capture de mouvement de haute précision avec huit caméras de suivi à grande vitesse (100 Hz). L'ensemble de données se compose de 39 séquences enregistrées à l'aide d'un capteur Microsoft Kinect dans différentes scènes intérieures, notamment les tests et le débogage, le SLAM portable, le SLAM robotisé, la structure par rapport à la texture, les objets dynamiques, la reconstruction d'objets 3D, les fichiers de validation et les fichiers d'étalonnage, qui sont des ensembles de données pour différentes tâches. Chaque catégorie contient plusieurs données et peut être utilisée pour tester les performances de diverses tâches.
Créer de l'IA avec l'IA
De l'idée au lancement — accélérez votre développement IA avec le co-codage IA gratuit, un environnement prêt à l'emploi et le meilleur prix pour les GPU.