Command Palette
Search for a command to run...
Optimal Resource Utilization for Autonomous Laboratory Orchestrators
Optimal Resource Utilization for Autonomous Laboratory Orchestrators
Austin McDannald Julia Tisaranni Howie Joress
Abstract
In autonomous laboratories, AI agents suggest the next batch of experiments to do. However, planning and executing those tasks taking full advantage of the available resources is a completely different question. This can be challenging when dealing with real-world hardware constraints, especially so when there are multiple instruments with different capacities and throughputs. Here we demonstrate a 2-step method to address resource utilization for our autonomous platform for metalorganic framework synthesis. First, we use constraint programming to find optimal schedules. This finds schedules that minimizes the total time while still satisfying the limitations and capacities of the hardware. Secondly, we use a system of status dependencies for each task, which allows for the robust execution of the optimal schedules.
One-sentence Summary
Demonstrated on a metalorganic framework synthesis platform, the proposed two-step method for optimal resource utilization in autonomous laboratories combines constraint programming to find schedules that minimize total time under hardware constraints with a status dependency system for robust execution.
Key Contributions
- A two-step method optimizes resource utilization for an autonomous metal-organic framework synthesis platform.
- Constraint programming computes schedules that minimize total experimental time while satisfying all hardware capacity and throughput constraints.
- A system of task status dependencies enables robust execution of the computed optimal schedules.
Introduction
The authors tackle a critical gap in autonomous material science platforms: orchestrating instrument use when AI agents request experiments with unknown, variable durations and complex dependencies. While prior systems focused on networking and component communication, they often lack the ability to optimize resource scheduling under real-world constraints like parallel capacity limits and inter-task dependencies. The authors frame this as a Job Shop Problem solved via Constraint Satisfaction Programming using OR-Tools, and they pair the generated optimal schedules with a status-dependency execution system to robustly run tasks on a metal-organic framework synthesis robot.
Method
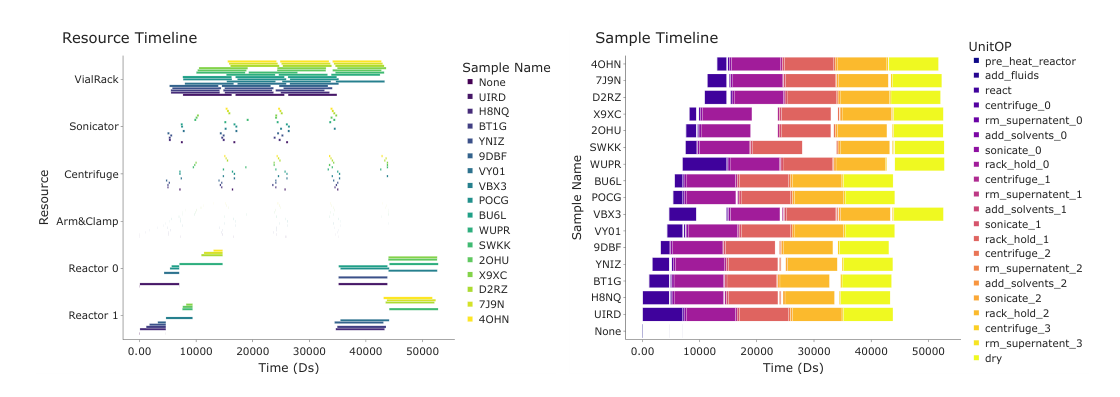
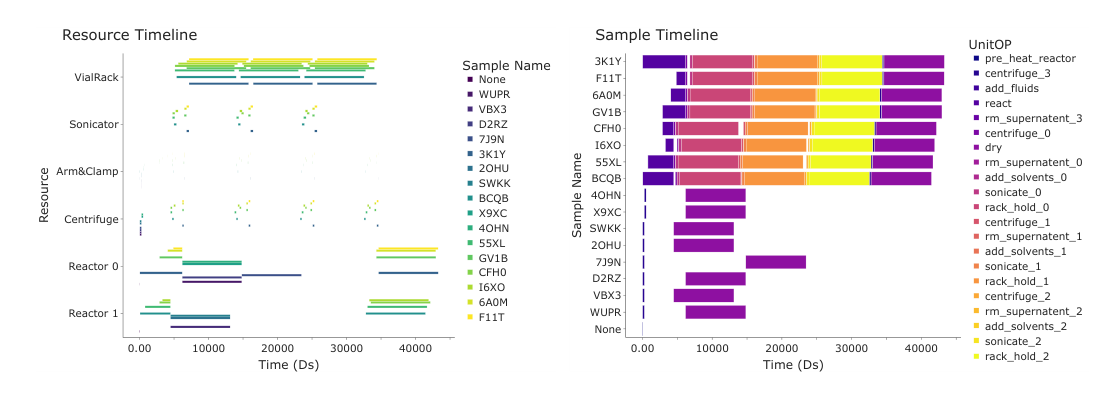
The autonomous laboratory orchestration systemcoordinates a robotic platform designed for the solvothermal synthesis of Metal-Organic Frameworks (MOFs). The platform comprises various stations, including syringe pumps for precursor dispensing, heater blocks for reactions, a centrifuge for washing, and a robotic manipulator for moving vials. To track the status of vials and resources, the authors assign each resource a 3-digit address indicating the resource type, specific unit, and position. This addressing system extends to syringe pumps and unassigned samples, enabling precise tracking of sample locations and resource occupancy throughout the synthesis workflow, which involves mixing precursors, heating, washing, and drying.
To manage the complex workflow and optimize resource utilization, the authors cast the robot scheduling operation as a Job Shop Problem within a Constraint Satisfaction framework. Each synthesis job is decomposed into a sequence of tasks with known or estimated durations and specific resource requirements. The scheduler imposes strict constraints to reflect hardware limitations and chemical requirements. For instance, tasks for a single sample must proceed sequentially, and the centrifuge requires that overlapping tasks start and end simultaneously. Furthermore, reactions occurring on the same heater block must share the same temperature and end at the same time to ensure safe pressure management. The solver aims to minimize the total completion time for a batch of jobs.
The scheduler is designed to be adaptive, allowing for the integration of new experiments suggested by AI agents during an ongoing campaign. When new jobs are introduced, the scheduler recalculates the optimal schedule for the remaining tasks of existing jobs alongside the tasks for the new samples, ensuring that constraints such as avoiding overlap between reaction and drying tasks on the same reactor are maintained.
While the Job Shop scheduler effectively determines the order of tasks and estimates start times, the authors note that relying solely on these estimates for execution is insufficient due to potential timing variations. To robustly execute the tasks, the system employs a mechanism of status dependencies and mutexes. A mutex is assigned to every system component and, for multi-sample resources, to each individual position. Functions must check out the appropriate mutexes before utilizing a component, ensuring exclusive access where necessary.
The execution logic is structured around Unit Operation (UnitOP) functions that adhere to a dependency graph. A UnitOP must pass all status dependency checks before attempting to acquire component mutexes, preventing resource hoarding and deadlocks. For example, the precursor dispensing task depends on the pre-heating task to ensure the reactor is at the correct temperature and that the reaction can commence shortly after dispensing. Shared resources, such as the centrifuge, are managed by Global UnitOPs that coordinate the simultaneous loading and processing of multiple samples, while individual sample-wise UnitOPs wait for the global operation to complete specific phases.
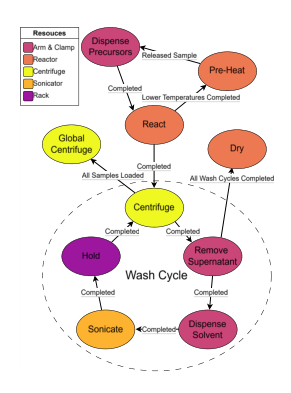
This combination of constraint-based scheduling and dependency-driven execution allows the platform to handle complex, multi-sample synthesis campaigns efficiently and robustly, adapting dynamically to new experimental requests while respecting all hardware and procedural constraints.
Experiment
A synthesis job is decomposed into a fixed sequence of tasks, each assigned to specific hardware. Most steps have short, constant durations, but the reaction step's length is variable and supplied by the AI agent, creating a scheduling problem that must respect hard resource-capacity and temporal constraints. The arm and clamp is the most frequently used resource, performing three one-minute tasks per sample (dispensing precursors, removing supernatant, dispensing solvent). Reaction duration is the only task with no fixed time, spanning anywhere from 30 minutes to 2880 minutes (two days), as set by the acquisition function. Wash cycles are macros that can repeat with different solvents, each cycle occupying the centrifuge for a fixed 60-minute period. A 24-hour hold step on the rack places the sample in an unconstrained storage state, enabling overnight queuing without blocking other resources. The centrifuge forces an all-or-nothing constraint: if multiple samples overlap on it, their start times must be identical to prevent mid-spin loading.
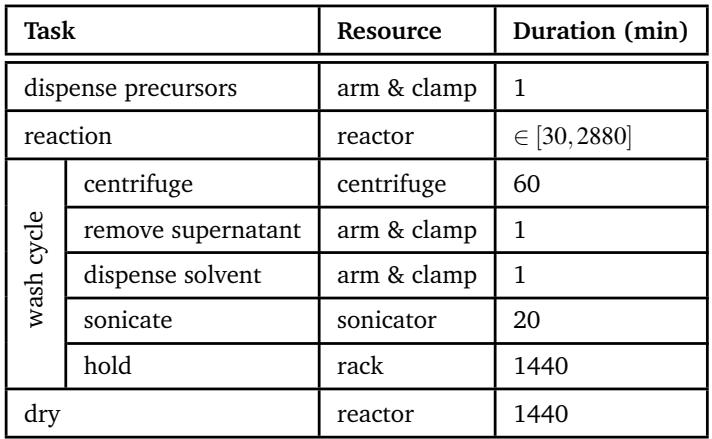
The synthesis workflow decomposes into a fixed task sequence with hard resource-capacity and temporal constraints, where the AI agent sets the variable reaction duration, turning execution into a scheduling problem. The arm and clamp perform multiple short tasks per sample, while the centrifuge enforces an all-or-nothing constraint that forces identical start times for overlapping samples to prevent mid-spin loading. A 24‑hour unconstrained hold step enables overnight queuing without blocking other resources, and wash cycles occupy the centrifuge for fixed periods.