Command Palette
Search for a command to run...
One-click Deployment of Spatiotemporal Intelligent Regression (STIR) Model gnnwr
Abstract
One-sentence Summary
This paper introduces a generalized spatiotemporal Gaussian process (gSTGP) that captures the temporal evolution of spatial dependence by varying spatial kernel eigenvalues over time, producing a non-stationary, non-separable covariance with a quasi Kronecker sum structure that avoids the inefficiencies of joint location-time modeling while demonstrating statistical effectiveness and computational efficiency in both simulations and longitudinal neuroimaging analyses of Alzheimer’s patients.
Key Contributions
- A novel Bayesian nonparametric generalized spatiotemporal Gaussian process (gSTGP) models temporal evolution of spatial dependence by dynamically varying spatial kernel eigenvalues over time through Mercer’s representation.
- The framework employs a quasi Kronecker sum covariance structure that yields a highly sparse joint covariance matrix for efficient Bayesian inference, accompanied by theoretical guarantees including posterior contraction.
- Comprehensive simulations and a longitudinal positron emission tomography analysis using Alzheimer’s Disease Neuroimaging Initiative data demonstrate the method’s statistical effectiveness and computational efficiency relative to existing non-stationary and non-separable models.
Introduction
Spatiotemporal data drives critical applications in climate modeling and neuroscience, where capturing how spatial relationships change over time is essential for accurate forecasting and disease tracking. This dynamic phenomenon, formally defined as temporal evolution of spatial dependence, requires statistical models capable of representing time-varying spatial covariance. Traditional spatiotemporal Gaussian process approaches struggle with this task because they rely on stationary or separable kernels that force spatial dependence to remain constant. While newer non-separable methods offer more flexibility, they typically merge space and time into a single joint variable, producing computationally prohibitive dense covariance matrices. The authors leverage a generalized spatiotemporal Gaussian process that introduces time dependence by dynamically adjusting the eigenvalues of the spatial kernel via Mercer's representation. This architecture produces a non-stationary, non-separable covariance model with a quasi Kronecker sum structure, enabling computationally efficient and fully flexible Bayesian nonparametric learning of temporal evolution of spatial dependence.
Dataset
-
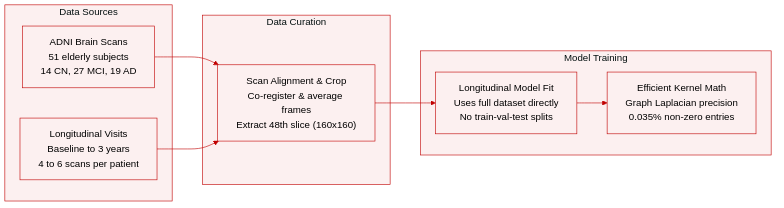
Dataset Source and Composition: The authors utilize longitudinal positron emission tomography (PET) brain imaging data from the Alzheimer's Disease Neuroimaging Initiative (ADNI) project. The dataset comprises 51 elderly subjects divided into three diagnostic groups: 14 Cognitively Normal (CN), 27 Mild Cognitive Impairment (MCI), and 19 Alzheimer's Disease (AD) patients.
-
Subset Details and Follow-up Structure: Scan sessions are scheduled at baseline, 6 months, 1 year, 18 months, 2 years, and 3 years. The number of time points per subject ranges from four to six depending on the cohort. The MCI group provides data up to 18 months, while the AD group is tracked for up to two years.
-
Processing and Cropping Strategy: Raw scans undergo co-registration for spatial alignment, averaging across six five-minute acquisition frames, standardization to a 160 × 160 × 96 voxel grid, and smoothing for uniform resolution. The authors then crop each volume to isolate the 48th middle horizontal slice, yielding a consistent 160 × 160 pixel matrix for all subjects and time points.
-
Model Usage and Computational Handling: The complete longitudinal dataset is applied directly to a generalized STGP model (Model II) to track structural and functional brain changes over time, with no explicit train-test splits or mixture ratios. To manage the massive 25,600 × 25,600 spatial dependency matrix, the authors construct a graph Laplacian-based kernel that sparsifies the precision matrix to 0.035 percent non-zero entries, enabling efficient analysis of the temporal evolution of spatial dependencies.
Method
The authors develop a generalized spatiotemporal Gaussian process (STGP) framework to model the temporal evolution of spatial dependence (TESD) in spatiotemporal data, addressing the limitations of the standard separable STGP. The core of the approach lies in introducing time-dependence into the spatial covariance structure. The standard STGP, referred to as Model 0, assumes a separable kernel where the joint spatiotemporal covariance is a Kronecker product of a purely spatial kernel Cx and a purely temporal kernel Ct. This structure inherently constrains the spatial covariance to change only by a scalar factor over time, rendering it incapable of capturing the complex, non-stationary evolution of spatial relationships, which is defined as TESD.
To overcome this, the authors propose two generalized models, Model I and Model II, which introduce a time-dependent spatial kernel Cx∣t. Model I, acting as a reference, uses a quasi-Kronecker product structure, where the prior covariance is defined as Cx∣t⊗˙Ct. This formulation results in a joint covariance matrix that is dense, as the time-dependent spatial kernel Cx∣t is coupled with the temporal kernel across all time points. In contrast, Model II, the proposed and preferred approach, utilizes a quasi-Kronecker sum structure, defined as Cx∣t⊕˙Ct. This structure separates the prior and likelihood components: the prior covariance CmII is Ix⊗Ct, which models the mean process, and the likelihood covariance Cy∣mII is Cx∣t⊗˙It, which models the noise. This separation results in a joint covariance matrix that is highly sparse and structured, as the time-dependent spatial kernel Cx∣t only affects the diagonal blocks of the full covariance matrix, corresponding to the TESD at each time point. This structural difference is visually evident in the figure below, where the joint kernels for the three models are illustrated. 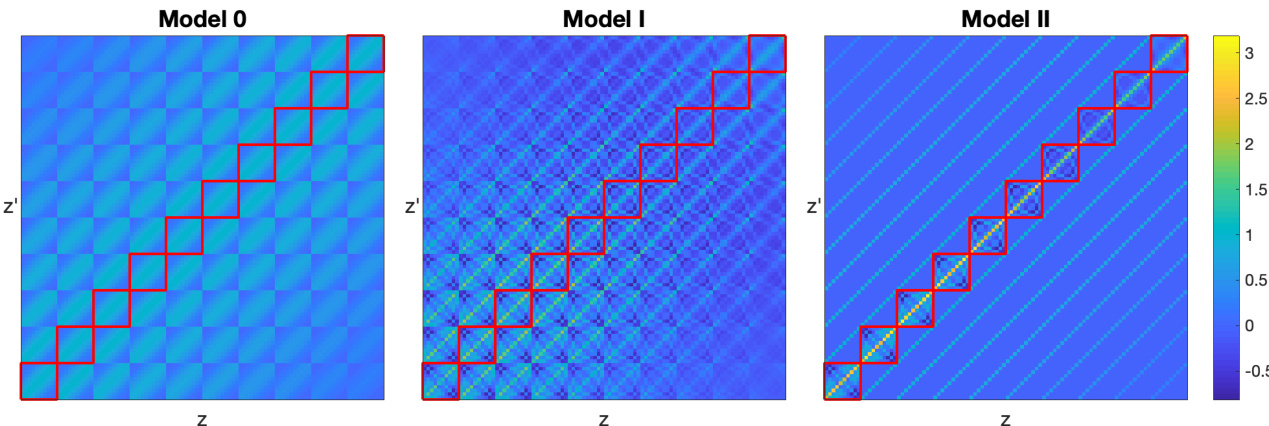
The time-dependent spatial kernel Cx∣t is constructed using the Mercer's theorem, which represents a covariance kernel as a series expansion over its eigenfunctions. The authors define Cx∣t by allowing the eigenvalues of a base spatial kernel Cx to vary with time. The eigenfunctions {ϕℓ(x)} are fixed and derived from the base kernel, while the eigenvalues {λℓ(t)} are modeled as a time-varying process. This is achieved by defining λℓ(t) as a Gaussian process GP(0,Cλ,ℓ), which allows for a full Bayesian treatment of the time-dependent eigenvalues. The time-dependent kernel is then given by the series Cx∣t(x,x′)=∑ℓ=1∞λℓ2(t)ϕℓ(x)ϕℓ(x′). The authors demonstrate that this construction, particularly with a specific decay rate for the eigenvalues γℓ=ℓ−κ/2, ensures the well-definedness of the kernel and provides desirable theoretical properties.
The framework is completed with a comprehensive posterior inference scheme. The graphical models below illustrate the hierarchical structure of the three models, showing the dependencies between the hyperparameters, the latent processes, and the observed data. For Model II, the inference is performed using a Metropolis-Within-Gibbs scheme, which includes a slice sampler for the hyperparameters and an elliptic slice sampler for the time-varying eigenvalues. The computational efficiency of Model II is a key advantage, as its sparse structure allows for significant reductions in computational complexity compared to the dense structure of Model I. 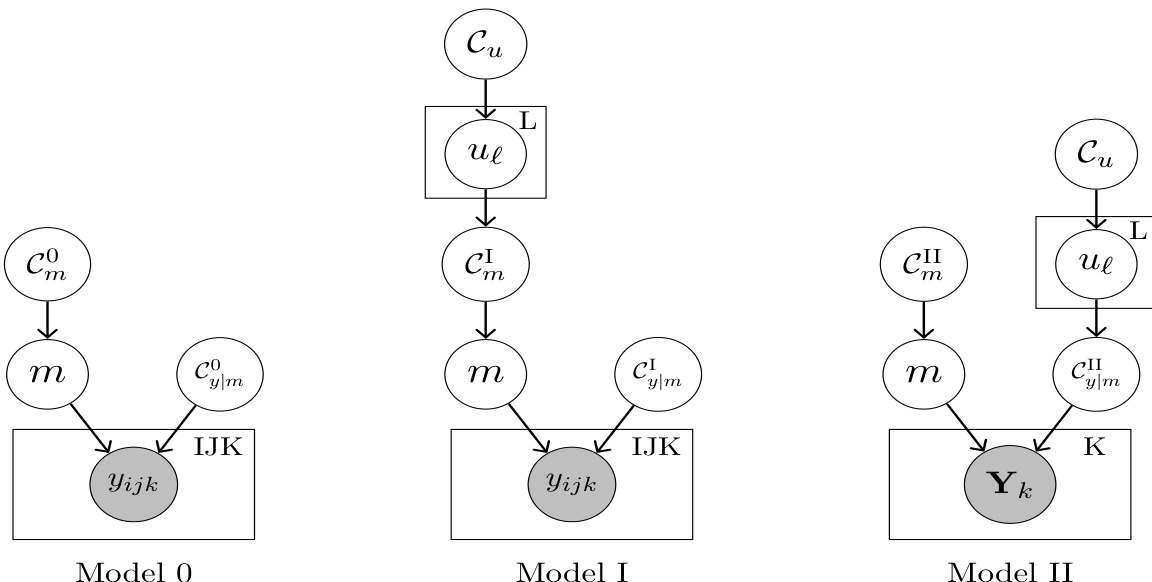
Experiment
The proposed generalized spatiotemporal Gaussian process models were evaluated against a spectrum of parametric alternatives using both simulated non-stationary processes and real PET brain imaging data. The simulation experiments validated the models' capacity to accurately fit and predict mean functions alongside time-evolving spatial dependence across various interpolation and extrapolation scenarios, while the neuroimaging study validated their ability to extract meaningful connectivity patterns and scale to high-dimensional data. Qualitatively, the parametric models consistently failed to capture dynamic spatial correlations, often collapsing to static or incorrect covariance structures, whereas the proposed quasi Kronecker sum model reliably characterized time-varying dependence and successfully extended predictions to unseen locations and future time points. Ultimately, the approach demonstrated superior accuracy and computational efficiency in modeling complex spatiotemporal covariance while revealing progressive neural connectivity loss associated with cognitive decline.
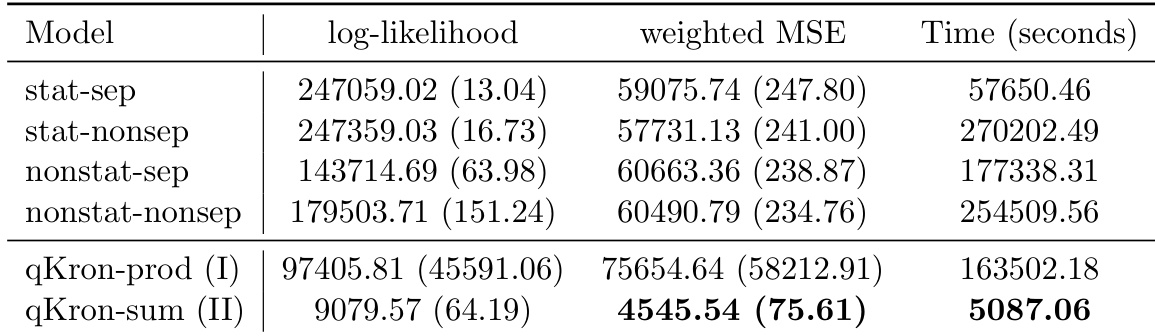
The authors compare various spatiotemporal models, including parametric and non-parametric ones, focusing on their ability to model and predict time-evolving spatial dependence (TESD). The proposed model, a non-stationary non-separable non-parametric approach, demonstrates superior performance in capturing TESD compared to other models, especially in both simulated and real brain imaging data. It achieves this with greater efficiency and accuracy, particularly in predicting covariance functions and extending spatial dependence to new locations. The proposed non-parametric model outperforms parametric models in capturing time-evolving spatial dependence in both simulated and real data. The model accurately predicts covariance functions and extends spatial dependence to new locations, where other models fail. The proposed model achieves better performance with less computational time compared to other models.

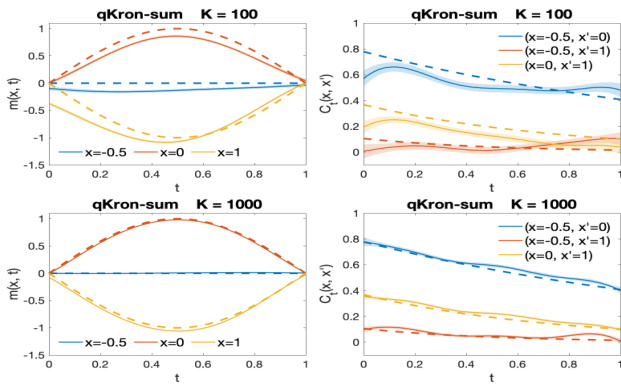
The authors compare the proposed qKron-sum model against various spatiotemporal models in fitting and predicting mean and covariance functions using simulated and real brain imaging data. Results show that the qKron-sum model effectively captures time-varying spatial dependence in both settings, outperforming other models in estimating and predicting covariance structures, particularly in complex real-world applications. The qKron-sum model accurately estimates time-varying spatial dependence in both simulated and real brain imaging data, while other models fail to capture dynamic covariance patterns. The qKron-sum model provides better predictive performance for covariance functions, especially when extrapolating to new locations or future time points. The proposed model achieves superior results with significantly lower computational cost compared to dense parametric models in real data applications.
The authors compare several spatiotemporal models, including the proposed generalized STGP model with a quasi Kronecker sum structure, against existing parametric models in both simulated and real brain imaging data. Results show that the proposed model achieves significantly lower error in estimating and predicting time-evolving spatial dependence, while also being more computationally efficient. Other models fail to capture the dynamic spatial correlations accurately, especially in real data where no true covariance is available for comparison. The proposed model outperforms all other models in estimating time-evolving spatial dependence with significantly lower error and faster computation. Other models fail to capture the time-varying spatial correlations accurately, even when applied to real brain imaging data. The proposed model is effective in extending spatial dependence to new locations without data, demonstrating its flexibility and nonparametric nature.
The authors compare the proposed generalized spatiotemporal Gaussian process model with various existing models in both simulated and real brain imaging data. Results show that the proposed model effectively captures time-evolving spatial dependence in both scenarios, outperforming other models in estimating and predicting spatial covariance functions, particularly in capturing dynamic changes over time and extending predictions to new locations. The proposed model also demonstrates computational efficiency compared to other dense models. The proposed model accurately captures time-evolving spatial dependence in both simulated and real brain imaging data, outperforming other models in estimating and predicting spatial covariance functions. The proposed model effectively extends predictions to new locations without data, demonstrating the benefit of a fully nonparametric approach. The proposed model is computationally efficient, using significantly less time than other dense models while achieving better performance in both fitting and prediction tasks.
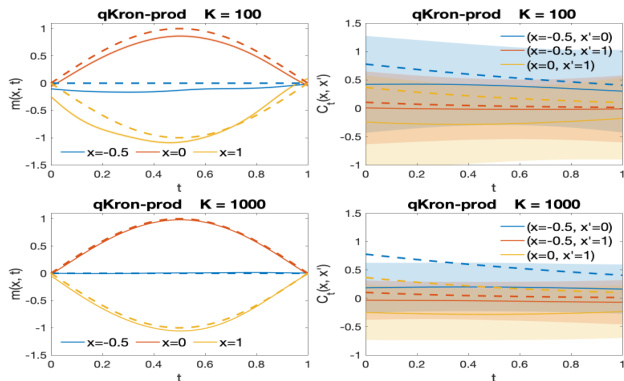
The authors compare various spatiotemporal models, including the proposed qKron-sum model, in terms of fitting and predicting mean functions and time-evolving spatial dependence (TESD). The qKron-sum model achieves significantly lower errors in estimating TESD compared to other models, with more accurate predictions and faster computation times. All models perform similarly in mean estimation, but only the qKron-sum model accurately captures the time-varying spatial correlations in both simulated and real brain imaging data. The qKron-sum model outperforms other models in estimating time-evolving spatial dependence with significantly lower errors. All models show comparable performance in mean function estimation, but only the qKron-sum model accurately captures time-varying spatial correlations. The qKron-sum model is more efficient, requiring less computation time than other models while achieving better prediction accuracy.

The experiments evaluate proposed non-parametric spatiotemporal models against existing parametric and dense alternatives using simulated and real brain imaging datasets to validate their ability to capture time-evolving spatial dependence and predict dynamic covariance structures. Across all settings, the proposed frameworks consistently outperform competing methods by accurately tracking time-varying spatial correlations and successfully extrapolating to unobserved locations and future time points. While all models demonstrate comparable performance in mean function estimation, only the proposed approaches effectively handle complex real-world patterns while requiring significantly less computational time.