Command Palette
Search for a command to run...
TUM RGB-D Simultaneous Localization and Mapping Dataset
Date
Organization
Publish URL
Paper URL
License
CC BY 4.0
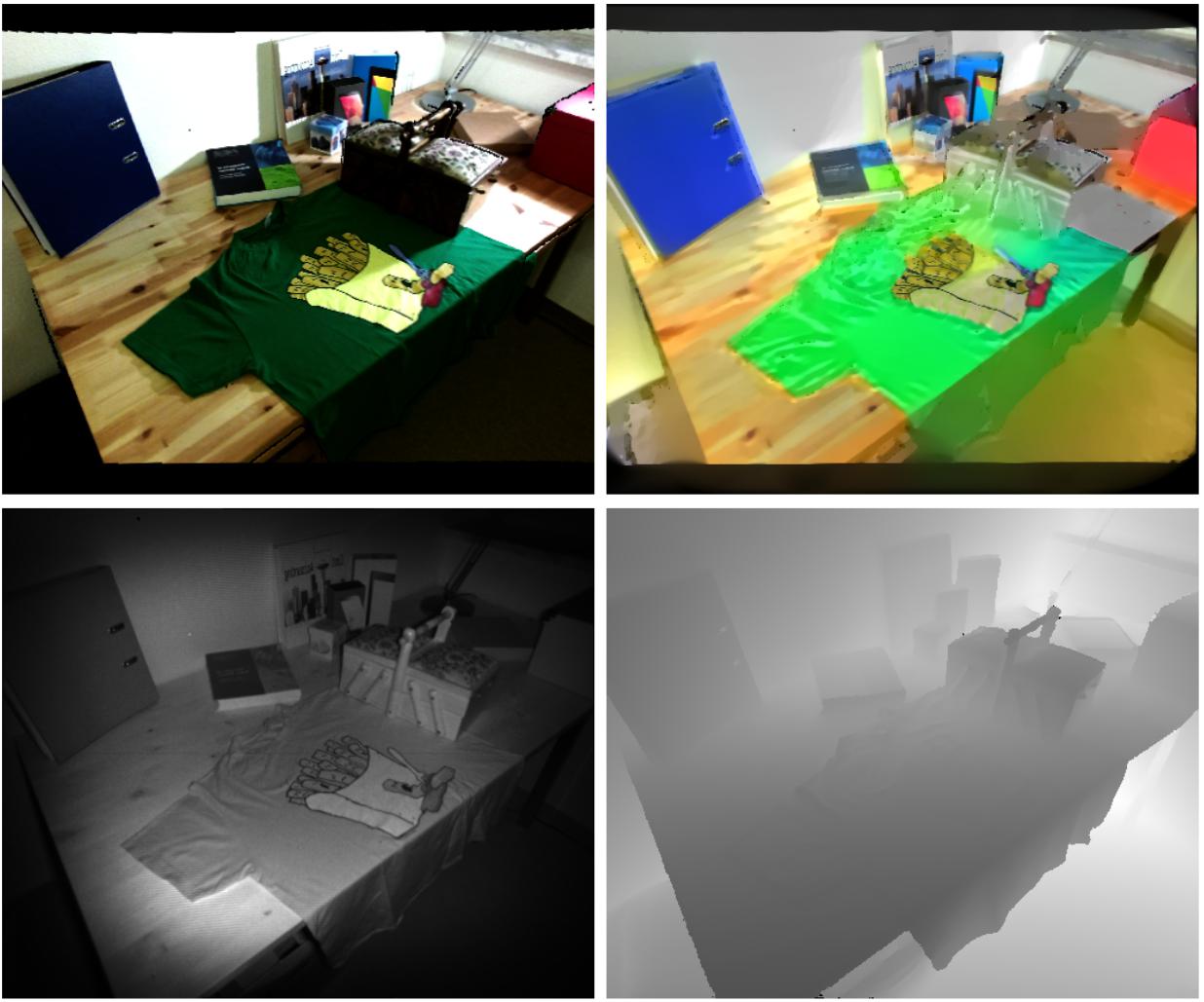
TUM RGB-D is an RGB-D dataset containing color and depth images recorded by a Microsoft Kinect sensor along the ground truth trajectory of the sensor. The data is recorded at full frame rate (30 Hz) and sensor resolution (640 x 480 pixels). The ground truth trajectory is obtained by a high-precision motion capture system with eight high-speed tracking cameras (100 Hz). This dataset consists of 39 sequences recorded using the Microsoft Kinect sensor in different indoor scenes, including Testing and Debugging, Handheld SLAM, Robot SLAM, Structure vs. Texture, Dynamic Objects, 3D Object Reconstruction, Validation Files, and Calibration Files for different tasks. Each category contains multiple data and can be used for performance testing of multiple tasks.
Build AI with AI
From idea to launch — accelerate your AI development with free AI co-coding, out-of-the-box environment and best price of GPUs.