Command Palette
Search for a command to run...
OmniRetarget-Datensatz Zur Globalen Neuzuordnung Von Roboterbewegungen
Datum
Größe
Paper-URL
Lizenz
MIT
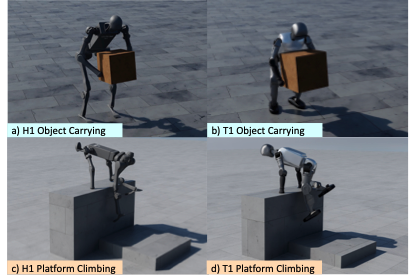
OmniRetarget ist ein hochwertiger Trajektorien-Datensatz für die Neuzuordnung der Ganzkörperbewegung humanoider Roboter, der 2025 von Amazon, dem MIT, der University of California, Berkeley und anderen Institutionen veröffentlicht wird. Die zugehörigen Ergebnisse der Studie sind:OmniRetarget: Interaktionserhaltende Datengenerierung für humanoide Ganzkörper-Lokomaniphrie und Szeneninteraktion". Dieser Datensatz enthält die Bewegungsbahnen des humanoiden Roboters G1 bei seiner Interaktion mit Objekten und komplexem Gelände und deckt drei Szenarien ab: Tragen von Objekten, Gehen im Gelände und gemischte Objekt-Gelände-Interaktion. Aufgrund von Lizenzbeschränkungen enthält der öffentliche Datensatz nicht die neu kartierte Version von LAFAN1. Der Datensatz ist in drei Teilmengen unterteilt, die insgesamt etwa vier Stunden Bewegungsbahndaten umfassen. Die spezifische Zusammensetzung ist wie folgt:
- Roboterobjekt: Die Flugbahn des Roboters, der das Objekt trägt, abgeleitet aus OMOMO 3.0-Daten;
- Robotergelände: Die Bewegungsbahn des Roboters auf komplexem Gelände, generiert durch internes MoCap, Dauer etwa 0,5 Stunden;
- Roboterobjekt-Gelände: Eine Bewegungsspur, die sowohl das Objekt als auch das Gelände umfasst und etwa 0,5 Stunden lang ist.
- Darüber hinaus enthält der Datensatz auch ein Modellverzeichnis, das visuelle Modelldateien in den Formaten URDF, SDF und OBJ zur Anzeige und nicht zum Training bereitstellt.
Die Bewegungstrajektoriendaten werden im NPZ-Format gespeichert. Jede Trajektorie enthält zwei Felder: Bildrate (fps) und Systemstatus (qpos).
Dataset-Beispiel
Zitat
@inproceedings{Yang2025OmniRetarget,
title={OmniRetarget: Interaction-Preserving Data Generation for Humanoid Whole-Body Loco-Manipulation and Scene Interaction},
author={Yang, Lujie and Huang, Xiaoyu and Wu, Zhen and Kanazawa, Angjoo and Abbeel, Pieter and Sferrazza, Carmelo and Liu, C. Karen and Duan, Rocky and Shi, Guanya},
booktitle={arXiv},
year={2025}
}
KI mit KI entwickeln
Von der Idee bis zum Launch – beschleunigen Sie Ihre KI-Entwicklung mit kostenlosem KI-Co-Coding, sofort einsatzbereiter Umgebung und bestem GPU-Preis.