HyperAI
Command Palette
Search for a command to run...
基于 MeanFlow 的一步策略学习框架 MP1
日期
10 个月前
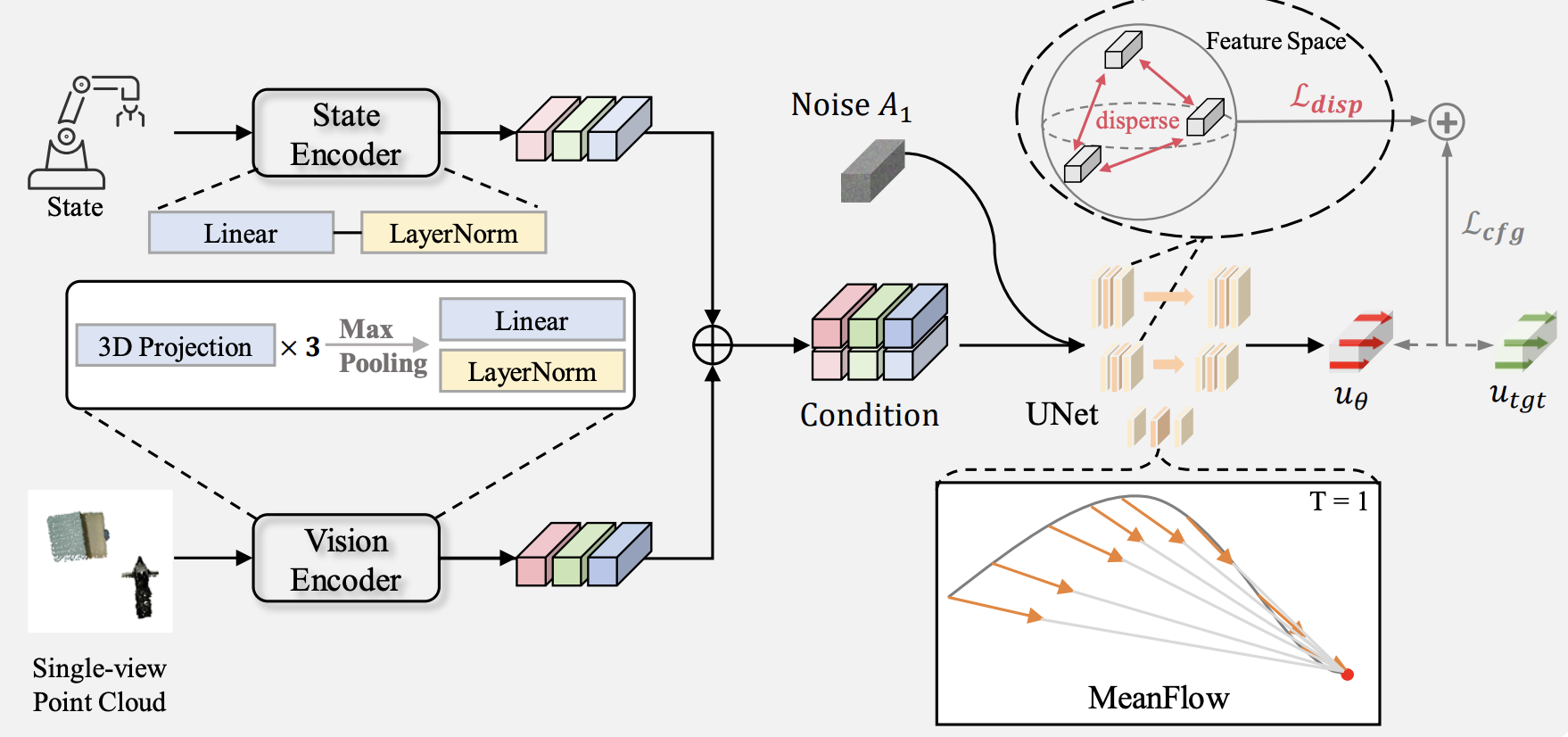
基于 MeanFlow 的一步策略学习框架(MeanFlow Tames Policy Learning in 1-step for Robotic Manipulation,简称 MP1)是由北京大学的研究团队于 2025 年 7 月 14 日提出的一种全新机器人学习框架,将 3D 点云输入与 MeanFlow 框架结合,能够在一次网络函数评估内直接生成动作轨迹。
MP1 通过 MeanFlow 架构,在仅一次前向传播中完成策略生成,兼顾速度、精度与泛化性,打破了扩散模型与流模型各自的性能瓶颈。并且创新地结合 MeanFlow 表达、 CFG 条件控制和 Dispersive Loss,实现了快、准、稳三者兼得的一步式机器人操作策略生成方法。