Command Palette
Search for a command to run...
RFUAV:用于无人飞行器检测与识别的基准数据集
RFUAV:用于无人飞行器检测与识别的基准数据集
Rui Shi Xiaodong Yu Shengming Wang Yijia Zhang Lu Xu Peng Pan Chunlai Ma
摘要
本文提出RFUAV,作为一个面向射频(RF-based)无人飞行器(UAV)识别的新基准数据集,并针对以下三个关键挑战展开研究:首先,现有大多数数据集所涵盖的无人机型号种类有限,且原始数据量不足,难以满足实际应用场景的需求;其次,现有数据集普遍缺乏覆盖广泛信噪比(SNR)范围的原始数据,或未提供将原始数据转换至不同SNR水平的工具,这一局限性严重影响了模型训练与评估的有效性;最后,许多现有数据集未提供开放的评估工具,导致该领域当前研究缺乏统一的评估标准。RFUAV数据集包含了约1.3 TB的原始射频数据,这些数据由37种不同类型的无人机在真实环境条件下,通过通用软件无线电外设(Universal Software Radio Peripheral, USRP)设备采集获得。通过对RFUAV中射频数据的深入分析,我们定义了一种名为“RF无人机指纹”的无人机特征序列,该特征序列能够有效区分不同无人机的射频信号。除数据集本身外,RFUAV还提供了一套基线预处理方法和模型评估工具。大量严谨的实验表明,所提出的预处理方法在使用该评估工具时,达到了当前最优(State-of-the-Art, SOTA)的性能水平。RFUAV数据集及基线实现代码已公开,可访问GitHub获取:https://github.com/kitoweeknd/RFUAV/。
一句话摘要
浙江理工大学、杭州电子科技大学与国防科技大学的研究人员推出了RFUAV,一个包含37种无人机型号的1.3 TB原始射频(RF)信号基准数据集,通过USRP设备采集,利用基于频谱图的深度学习实现无人机特异性射频指纹识别;其两阶段模型结合ViT与YOLO,并采用优化的STFT和“Hot”色彩映射,在低信噪比(SNR)条件下达到当前最优性能,推动了真实场景下鲁棒无人机检测技术的发展。
主要贡献
-
本文提出了RFUAV,一个面向无人飞行器(UAV)检测与识别的综合性基准数据集,数据来源于在工业、科学与医疗(ISM)频段(985 MHz、2.4 GHz、5.8 GHz)运行的民用无人机,利用无人机与其控制器之间的持续射频通信建立独特的射频指纹。
-
作者提出了一种两阶段深度学习框架:首先使用YOLO在短时傅里叶变换(STFT)生成的频谱图中检测无人机信号,随后通过基于ResNet的分类器识别无人机型号;该框架结合高效的双缓冲队列与基于FFT的预处理,实现了实时、高精度的检测。
-
在RFUAV数据集上的实验表明,模型在不同信噪比(SNR从-20 dB到20 dB)下均表现出强鲁棒性,性能评估基于不同变换点(32至1024)的STFT生成的频谱图;该数据集具备可扩展性,支持与DroneRFa和DroneRF等其他数据集集成,覆盖超过54种无人机型号。
引言
作者利用智能城市中无人飞行器(UAV)日益普及的背景,应对由智能自主系统引发的关键安全与隐私问题。尽管已有多种检测方法——视觉、声学、雷达和射频(RF)检测——但RF检测因其鲁棒性和成本效益突出,特别适合实际应用。然而,以往方法在低信噪比(SNR)条件下准确率受限,且对多样化商用无人机型号覆盖不足。本文主要贡献在于开发了RFUAV数据集与深度学习框架,通过先进的信号预处理与模型架构实现高精度UAV检测。通过整合DroneRFa和DroneRF等多源数据,RFUAV已覆盖超过54种无人机型号,确保广泛代表性。作者还强调将持续更新以纳入新型号,使RFUAV成为推动射频域RF检测与深度学习发展的动态演进资源。
数据集
- RFUAV数据集包含约1.3 TB的原始射频(RF)数据,由37种不同无人机型号通过通用软件无线电外设(USRP)X310设备在真实环境中采集。
- 数据在高信噪比(SNR)条件下采集,每种无人机型号至少贡献15 GB原始IQ样本,部分型号(如DJI FPV COMBO、DJI MINI 3)包含多种带宽配置,以确保全面覆盖。
- 原始数据以交错IQ格式存储,精度为32位浮点数,采集参数记录于配套的XML文件中,确保完全可复现。
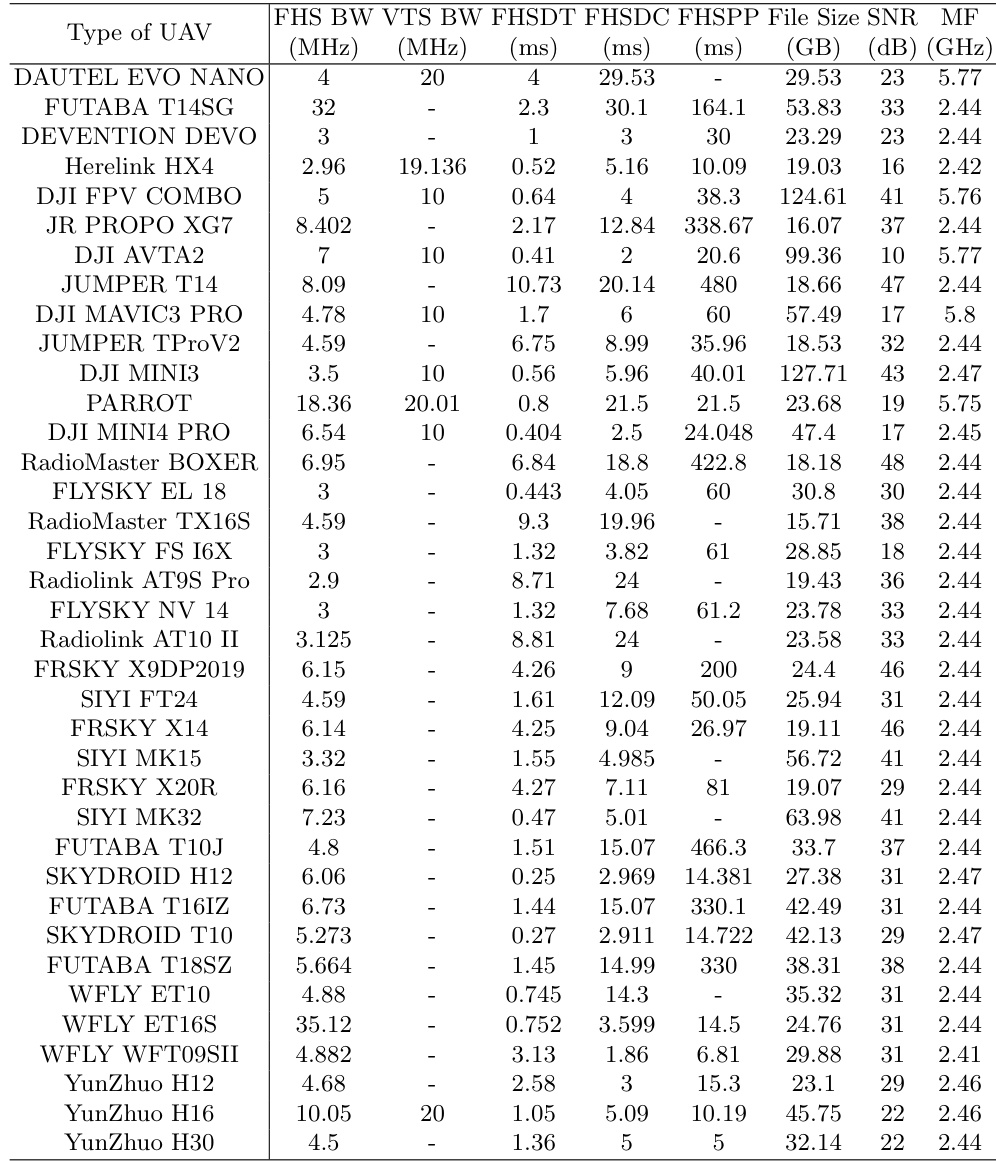
- 数据集包含用于遥控的跳频扩频(FHSS)信号和用于视频传输的固定带宽信号,附有详细元数据,包括跳频带宽(FHSBW)、持续时间(FHSDT)、占空比(FHSDC)、周期性(FHSPP)及视频传输带宽(VTSBW)。
- 基于这些信号特征提取出独特的RF无人机指纹,作为深度学习模型识别无人机型号的判别性输入。
- 作者利用该数据集训练并评估两阶段模型,采用ViT、SwinTransformer、YOLO和ResNet等架构。
- 训练采用全部37种无人机型号的数据混合,对不同运行阶段(如配对与飞行)进行均衡采样,确保信号表征多样性。
- 提供预处理流程,包括SNR估计、3D频谱图生成与信号分解,支持将原始数据转换至不同SNR水平,以实现鲁棒模型评估。
- 数据集支持通过基于GNU Radio的信号回放模块连接频谱分析仪进行实时回放与质量验证,保障信号完整性。
- 作者实施系统化数据采集流程,包括使用频谱图手动发现信号、动态中心频率调谐与自适应增益控制,以维持所有记录的高SNR。
- 针对视频传输带宽可变的无人机(如部分DJI型号),进行多次采集会话,以捕获所有可能配置,确保覆盖所有运行场景。
- 数据集已公开,GitHub上提供完整预处理代码与评估工具,支持RF无人机检测领域的标准化基准测试与可复现研究。
方法
作者采用两阶段深度学习框架进行基于射频的无人机检测与识别,旨在利用无人机与其操作员之间的持续通信。系统首先在工业、科学与医疗(ISM)频段(具体为985 MHz、2.4 GHz和5.8 GHz)内捕获原始射频(RF)信号,使用专用接收器完成。随后对信号进行处理,生成频谱图,作为检测与分类模型的主要输入。通过短时傅里叶变换(STFT)将原始时域信号转换为频谱图,该方法可可视化信号在时间和频率上的能量分布,从而提取出不同无人机型号特有的频谱特征。
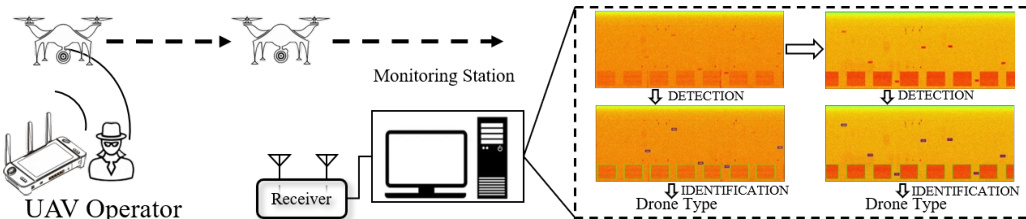
参考框架图以理解整体工作流程。过程始于监测站的信号采集,接收器捕获无人机及其操作员的RF发射信号。收集的数据经预处理生成频谱图,输入两阶段模型。第一阶段采用目标检测网络(特别是YOLO),在频谱图中检测无人机信号的存在,通过识别信号目标输出边界框。第一阶段识别出的感兴趣区域传递至第二阶段,由图像分类网络(ResNet)对检测到的信号进行分类,识别具体无人机型号。这种模块化设计充分利用了目标检测与图像分类架构的优势,实现高效且准确的检测与识别。
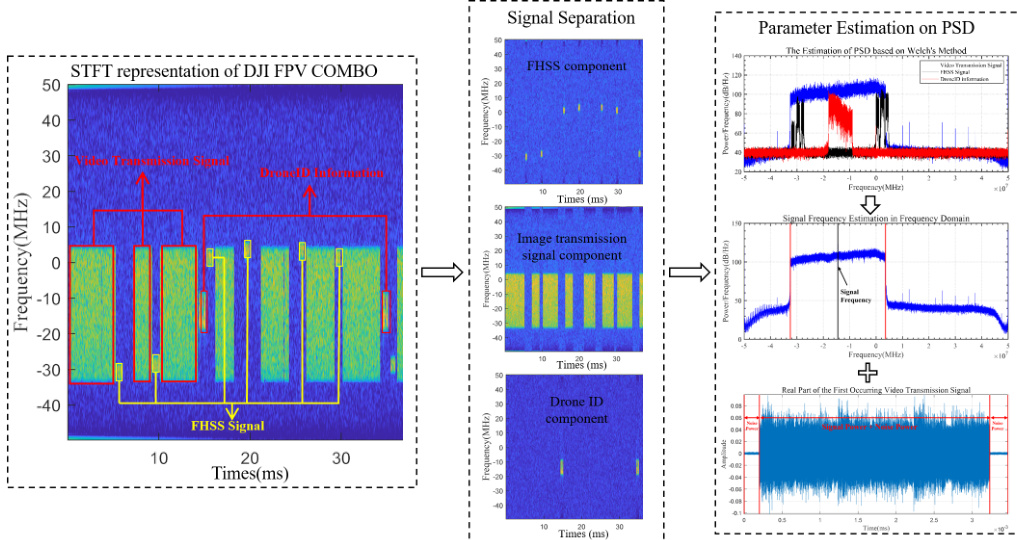
如图所示,系统还支持信号分离与参数估计等高级信号处理任务。过程始于原始RF信号(如DJI FPV COMBO信号)的STFT表示,其在时频域中揭示出多个独立成分:下行视频传输信号采用正交频分复用(OFDM)调制,上行控制信号使用跳频扩频(FHSS),以及包含DroneID信息的数据帧。尽管这些信号在频率上重叠,但时间上分离,因此可实现隔离。采用基于双滑动窗口的信号检测算法在时域中识别每段信号的起止位置。分离后,使用Welch方法估计各成分的功率谱密度(PSD)。通过在PSD上滑动窗口扫描,找到窗口内能量最大的频率点,确定信号中心频率。最后,通过分别计算信号与噪声功率,并应用标准SNR公式,实现时域SNR估计。该详细分析全面揭示了捕获信号的射频特性,支持精确参数估计。
实验
- 开展实验以评估STFT点数(STFTP)与色彩映射(CMAP)方法对不同SNR下无人机识别准确率的影响。
- 发现增加STFTP可提升频率分辨率,STFTP = 512(195.3125 kHz分辨率)能清晰分离图像传输信号与FHSS信号,而过高的STFTP(如65536、524288)会降低时间分辨率,模糊时序特征。
- 确定最优STFTP范围为256–512,可在时间与频率分辨率间取得平衡,避免细节丢失与信号合并。
- 在SNR从20 dB到-20 dB的范围内评估四种CMAP方法(Autumn、Hot、HSV、Parula);“HSV”对比度最高,其次为“Hot”、“Autumn”,“Parula”最弱。
- 在DJI FPV COMBO数据集上,“HSV”CMAP在低SNR下实现最佳视觉区分,信号边界清晰至-10 dB,而“Parula”对比度最弱,泛化能力最差。
- 证明不同无人机的频谱图呈现独特视觉模式,即使在噪声环境下也能实现有效识别。
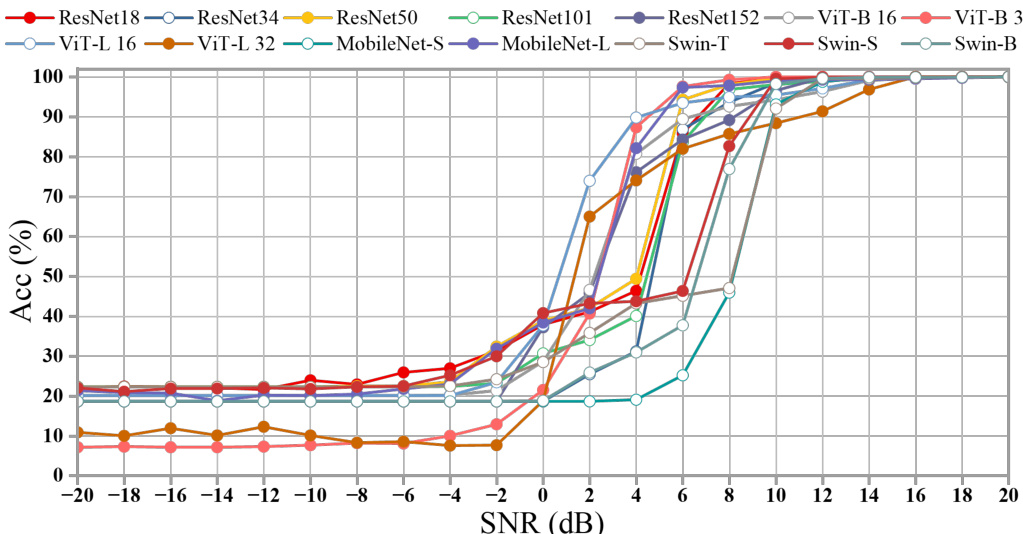
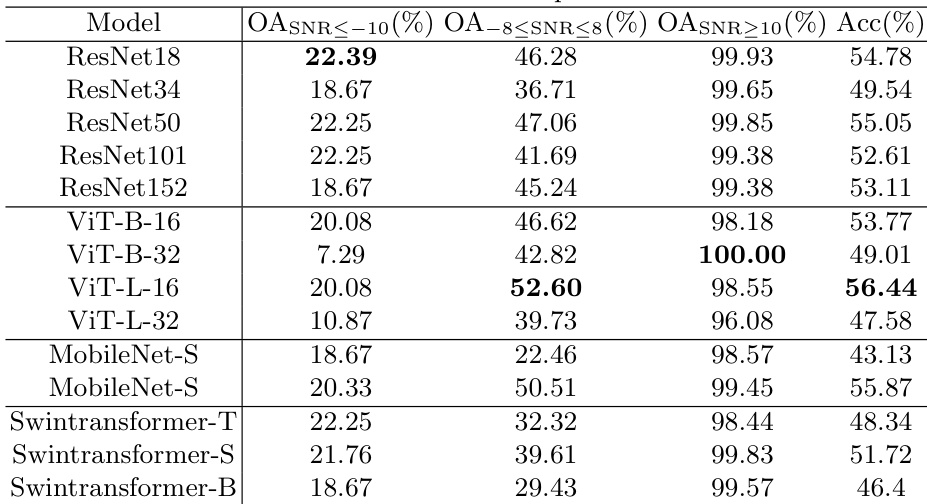
作者采用多种深度学习模型评估其在不同信噪比(SNR)下无人机识别任务的性能。结果显示,模型准确率随SNR提升而提高,ResNet与ViT变体在SNR高于8 dB时准确率超过90%,而MobileNet与Swin模型在所有SNR条件下表现均较低。
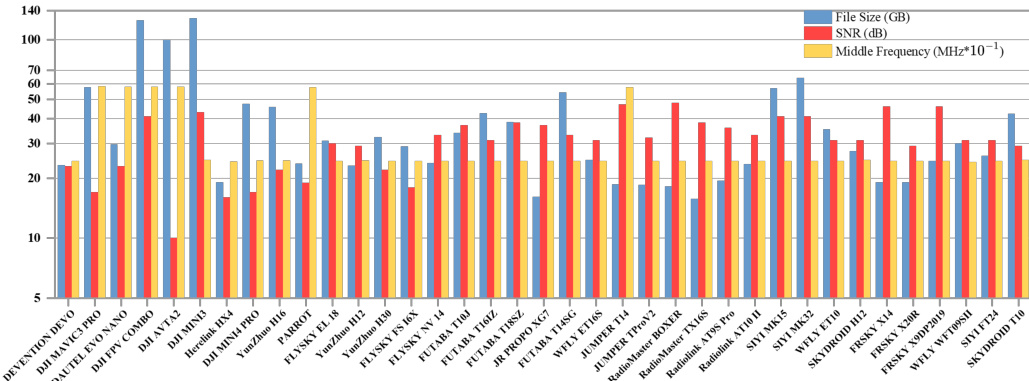
作者使用柱状图比较不同无人机的文件大小、SNR值与中心频率。结果显示,DJI MINI3与DJI AVATA2文件最大,而SNR与中心频率在不同无人机型号间差异显著,部分型号(如DJI MINI3与DJI AVATA2)的SNR与中心频率值高于其他型号。
作者采用不同深度学习模型在不同SNR条件下评估其在无人机识别任务中的性能,结果显示ViT-L-32在整体准确率上达到最高(56.44%),在SNR ≥ 10%时实现100.00%的总体准确率(OA)。ResNet18在低SNR(≤ -10%)下表现最佳,OA为22.39%;而ResNet34与ResNet50在所有SNR水平下表现相似,表明模型架构对噪声鲁棒性具有显著影响。
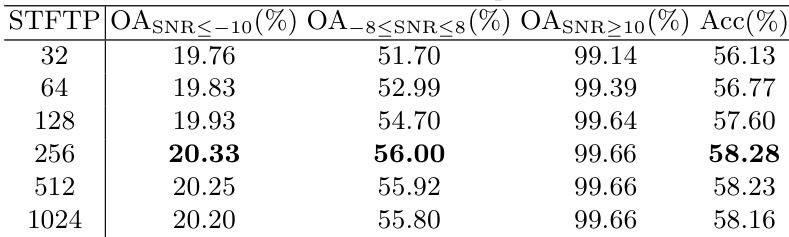
作者采用不同STFTP值分析其对频谱图质量及深度学习模型在无人机识别中准确率的影响。结果显示,增加STFTP可提升频率分辨率与信号清晰度,256在所有SNR条件下实现最佳整体准确率,而更高值(如1024)因时间分辨率下降导致性能下降。
作者使用表格展示不同无人机在不同信号处理参数下的性能指标,包括频带宽度、时延与文件大小。结果显示,色彩映射方法与信噪比的选择显著影响频谱图中无人机信号的可见性与可区分性,“HSV”方法对比度最高,因而提供最清晰的信号表示。