HyperAI
Command Palette
Search for a command to run...
nuPlan 自动驾驶数据集
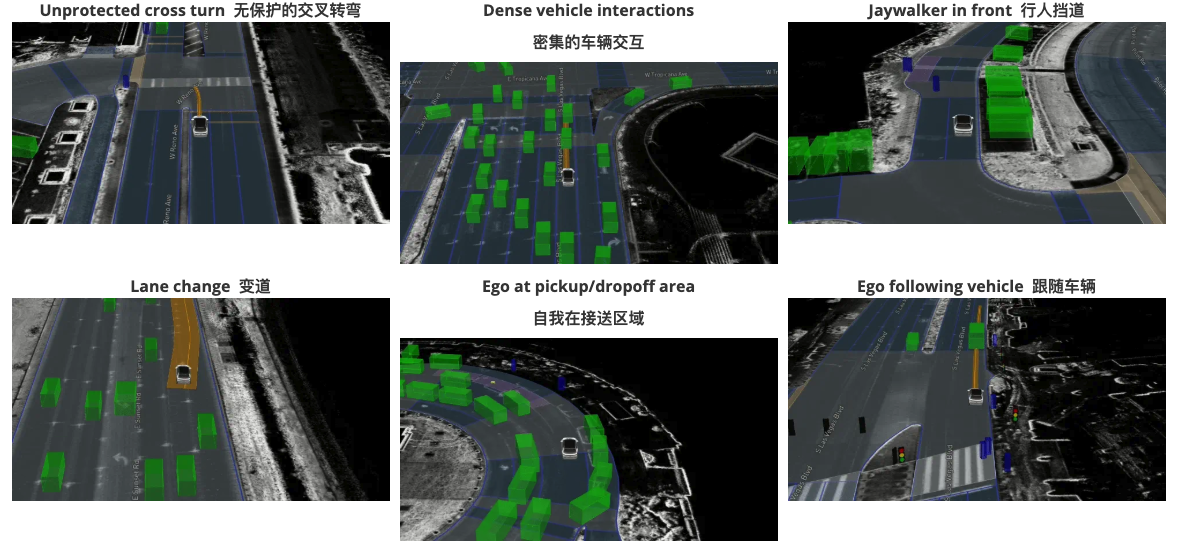
nuPlan 是由 Motional 于 2022 年发布的一个自动驾驶数据集,相关论文成果为「nuPlan: A closed-loop ML-based planning benchmark for autonomous vehicles」,旨在提供基于机器学习的规划器开发训练框架、轻量级闭环仿真器、运动规划专用指标以及可视化结果的交互式工具。 该数据集包含来自美国和亚洲 4 个城市(波士顿、匹兹堡、拉斯维加斯和新加坡)的 1,200 小时人类驾驶数据。
此数据集由社区用户贡献,仅用于教育和信息目的。如有任何内容涉及版权侵权,请通过 [email protected] 联系我们,我们将及时审核并删除。