HyperAI
Command Palette
Search for a command to run...
BC-Z 机器人学习数据集
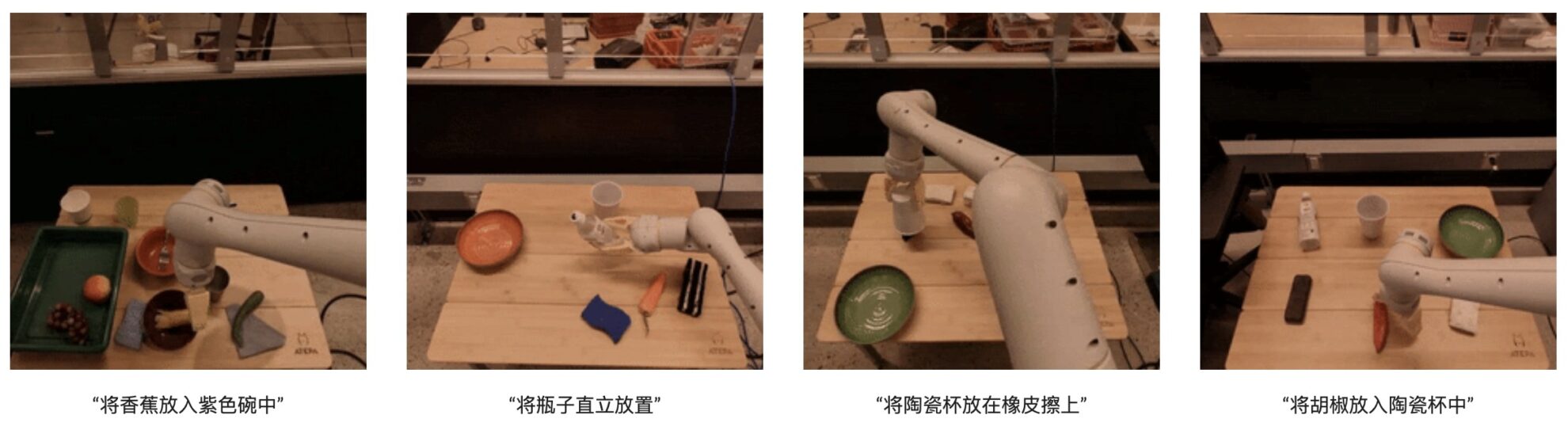
BC-Z 数据集是一个由谷歌、 Everyday Robots 、加州大学伯克利分校和斯坦福大学于 2022 年共同开发的大规模机器人学习数据集,旨在推动机器人模仿学习领域的发展。相关论文成果为「BC-Z: Zero-Shot Task Generalization with Robotic Imitation Learning」。该数据集的核心贡献在于它支持零样本 (zero-shot) 任务泛化,即让机器人能够在没有先前经验的情况下,通过模仿学习来执行新的操作任务。
BC-Z 数据集包含了超过 25,877 个不同的操作任务场景,涵盖了 100 种多样化的操作任务。这些任务通过专家级的远程操作和共享自主过程来收集,涉及 12 个机器人和 7 名不同的操作员,累计了 125 小时的机器人操作时间。数据集支持训练一个 7 自由度的多任务策略,该策略可以根据任务的语言描述或人类操作视频来调整,以执行特定的操作任务。
BC-Z-robot.torrent
做种 2正在下载 0已完成 204总下载量 374
此数据集由社区用户贡献,仅用于教育和信息目的。如有任何内容涉及版权侵权,请通过 [email protected] 联系我们,我们将及时审核并删除。