HyperAI
Command Palette
Search for a command to run...
Open X-Embodiment 真实机器人数据集
* 数据集可在此处下载。
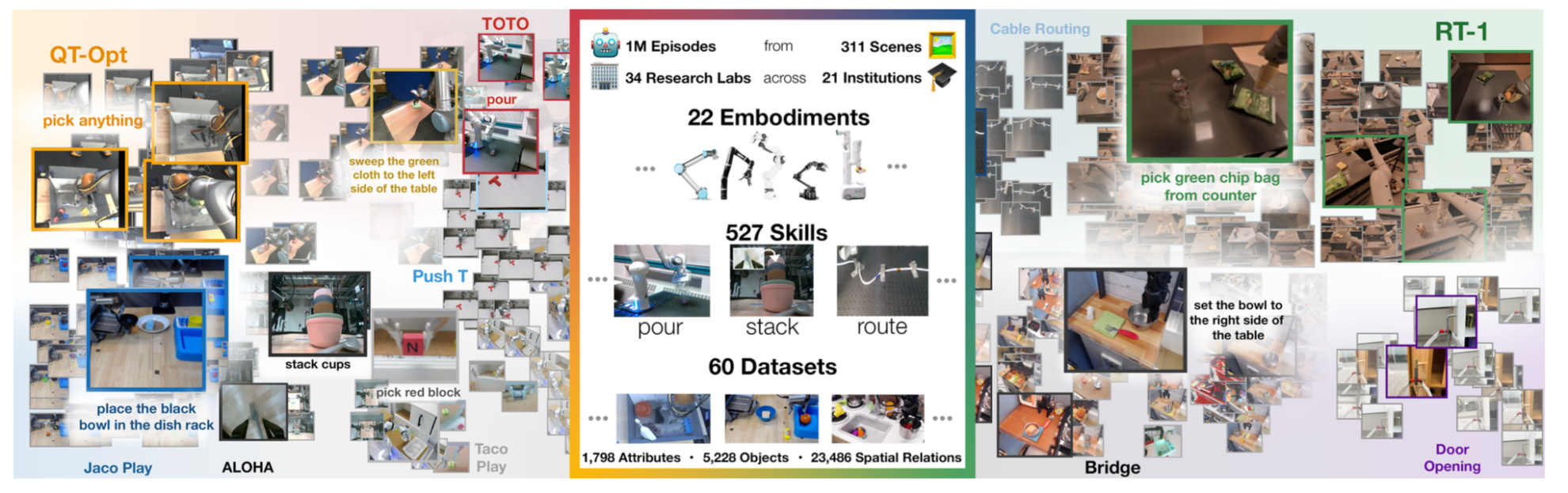
Open X-Embodiment 数据集是由 DeepMind 于 2023 年发起的一个大规模开源真实机器人数据集项目,旨在推动通用机器人学习研究。该数据集汇集了从单臂机器人到双手机器人和四足机器人的 22 种不同机器人类型的数据,由 21 个不同机构合作收集,涵盖了 527 种不同的技能和 160,266 项任务。这些数据以统一的 RLDS 格式提供,便于后续研究和应用。它是通过汇集来自全球 34 个机器人研究实验室的 60 个现有机器人数据集构建的,展示了各种机器人任务和环境。
相关论文成果为「Open X-Embodiment: Robotic Learning Datasets and RT-X Models」,首次发布时间为 2023 年 10 月,最新修订时间为 2024 年 6 月。
此数据集由社区用户贡献,仅用于教育和信息目的。如有任何内容涉及版权侵权,请通过 [email protected] 联系我们,我们将及时审核并删除。