HyperAI
Command Palette
Search for a command to run...
Gibson Environment 感知数据集
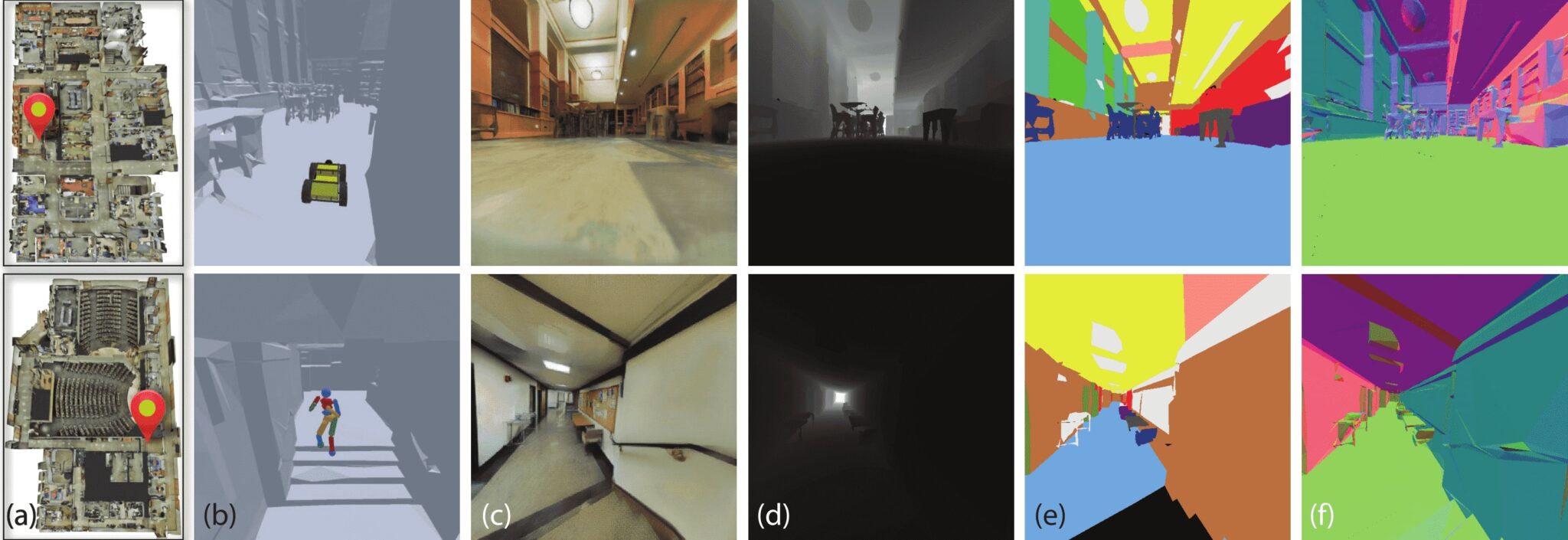
Gibson Environment 是一个开源的感知和模拟数据集。数据集用于探索机器人的主动和对现实世界的感知,对现实世界进行感知学习。数据集基于虚拟化的真实空间,而非人工设计的空间。数据集包含了 572 栋完整建筑的 1,400 多个楼层空间。该数据集主要特点是:I. 来自现实世界并反映其语义复杂性;II. 具有内部合成机制 “Goggles”,能够在现实世界中部署训练有素的模型,无需进一步的领域适应;III. 实施代理,并使其受到物理和空间的限制。
此数据集由社区用户贡献,仅用于教育和信息目的。如有任何内容涉及版权侵权,请通过 [email protected] 联系我们,我们将及时审核并删除。