Command Palette
Search for a command to run...
هولي-سبيشال: تحويل تدفقات الفيديو إلى ذكاء مكاني ثلاثي الأبعاد كلي
هولي-سبيشال: تحويل تدفقات الفيديو إلى ذكاء مكاني ثلاثي الأبعاد كلي
الملخص
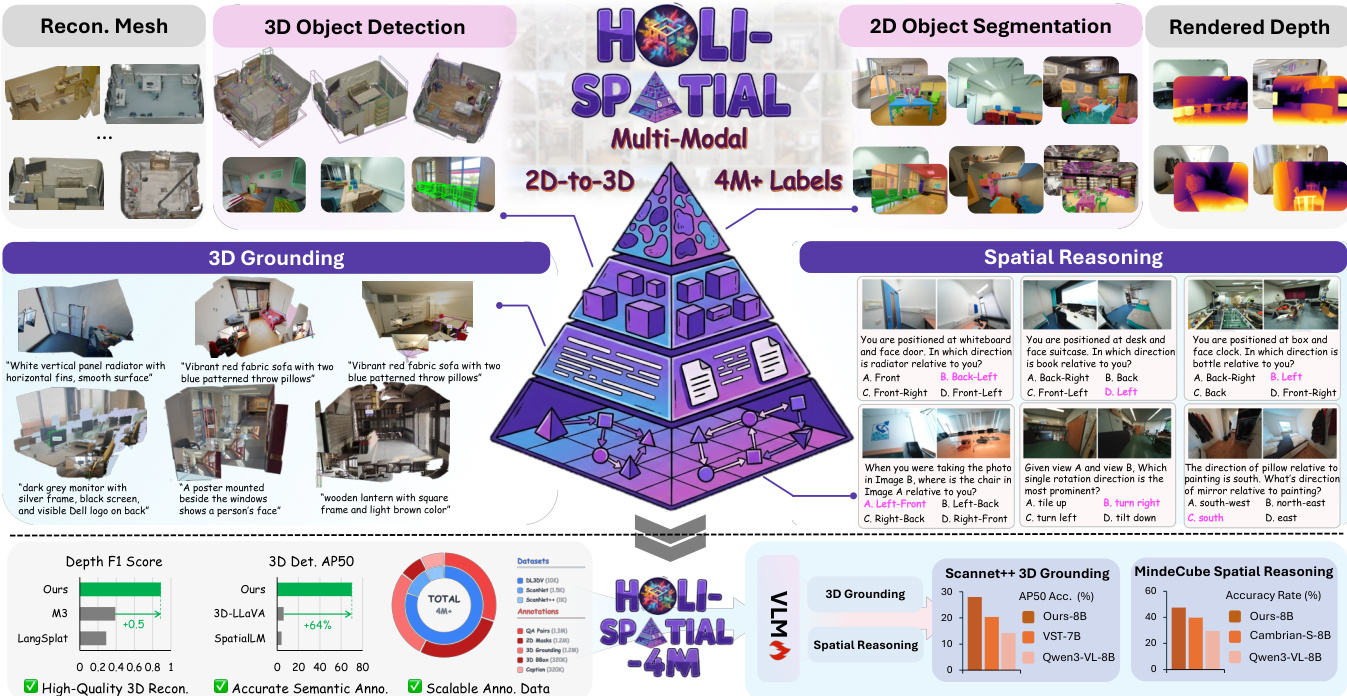
يعتمد السعي نحو الذكاء المكاني بشكل جوهري على الوصول إلى بيانات ثلاثية الأبعاد واسعة النطاق ودقيقة التفاصيل. غير أن المناهج القائمة تركز في الغالب على بناء معايير تقييم الفهم المكاني من خلال توليد أزواج الأسئلة والأجوبة (QA) انطلاقًا من عدد محدود من مجموعات البيانات المُوَثَّقة يدويًا، بدلًا من توثيق مشاهد ثلاثية الأبعاد واسعة النطاق جديدة بشكل منهجي انطلاقًا من بيانات الويب الخام. ونتيجة لذلك، فإن قابلية التوسع لهذه المناهج مقيدة بشكل حاد، كما أن أداء النماذج يتعثر بفعل الفجوات الدلالية المتأصلة في تلك المجموعات المحدودة التوثيق. وفي هذا العمل، نقترح "هولي-سبيشل" (Holi-Spatial)، وهي أول مجموعة بيانات متعددة الوسائط واعية مكانيًا، واسعة النطاق، ومُؤتمتة بالكامل، تُبنى من مدخلات فيديو خام دون أي تدخل بشري، وذلك باستخدام خط أنابيب توثيق البيانات المقترح. وتدعم "هولي-سبيشل" إشرافًا مكانيًا متعدد المستويات، يمتد من إعادة بناء دقيقة هندسيًا باستخدام تقنية "الرش الغاوسي ثلاثي الأبعاد" (3D Gaussian Splatting - 3DGS) مع خرائط عمق مُصوّرة، إلى توثيق دلالي على مستوى الكائنات والعلاقات، مقترنًا بأزواج أسئلة وأجوبة (QA) مكانية مُتوافقة. وبناءً على خط أنابيب منضبط ومنهجي، قمنا أيضًا ببناء "هولي-سبيشل-4م" (Holi-Spatial-4M)، وهي أول مجموعة بيانات دلالية ثلاثية الأبعاد واسعة النطاق وعالية الجودة، تضم 12 ألف مشهد ثلاثي الأبعاد مُحسَّن باستخدام تقنية 3DGS، و1.3 مليون قناع ثنائي الأبعاد، و320 ألف صندوق حدودي ثلاثي الأبعاد، و320 ألف وصف نصي للكيانات، و1.2 مليون حالة ترسيخ ثلاثي الأبعاد (3D grounding instances)، و1.2 مليون زوج أسئلة وأجوبة مكانية تغطي مهام استدلال متنوعة تشمل الأبعاد الهندسية والعلاقاتية والدلالية. وتُظهر مجموعة "هولي-سبيشل" أداءً استثنائيًا من حيث جودة توثيق البيانات، متفوقة بشكل ملحوظ على الطرق القائمة على التمرير الأمامي (feed-forward) والطرق المُحسَّنة لكل مشهد على حدة، وذلك على مجموعات بيانات مثل ScanNet وScanNet++ وDL3DV. وعلاوة على ذلك، أدى ضبط نماذج الرؤية واللغة (VLMs) الدقيق على مهام الاستدلال المكاني باستخدام هذه المجموعة إلى تحسينات جوهرية في أداء النماذج.
One-sentence Summary
Researchers from Shanghai AI Lab and multiple universities introduce Holi-Spatial, a fully automated pipeline that converts raw videos into high-fidelity 3D scenes using 3D Gaussian Splatting and VLMs. This approach overcomes manual annotation limits to create the Holi-Spatial-4M dataset, significantly boosting spatial reasoning and grounding in Vision-Language Models.
Key Contributions
- Holi-Spatial addresses the scarcity and imbalance of raw spatial data by introducing a fully automated framework that converts raw video streams into high-fidelity 3D geometry and holistic semantic annotations without requiring explicit 3D sensors or human-in-the-loop labeling.
- The method employs a three-stage pipeline combining geometric optimization with 3D Gaussian Splatting, image-level perception using open-vocabulary VLMs and SAM3, and scene-level refinement to merge instances and generate detailed captions and grounding pairs.
- Evaluation on benchmarks like ScanNet++ and DL3DV-10K demonstrates that the resulting Holi-Spatial-4M dataset improves multi-view depth estimation by up to 0.5 F1 and boosts 3D detection AP50 by 64%, while fine-tuning Qwen3-VL yields a 15% gain in 3D grounding accuracy.
Introduction
Spatial intelligence is essential for enabling large multimodal models to perceive and reason about the real 3D world, which is critical for applications like robotic manipulation, navigation, and augmented reality. Current approaches struggle with scalability because they depend on scarce, manually annotated 3D datasets or specialized scanning hardware, resulting in limited semantic coverage and high annotation costs. To overcome these barriers, the authors introduce Holi-Spatial, a fully automated framework that converts raw video streams into high-fidelity 3D geometry with holistic semantic annotations without requiring human labeling or explicit 3D sensors. This system unifies geometric optimization, image-level perception, and scene-level refinement to generate a massive, diverse dataset that significantly improves the performance of downstream 3D grounding and spatial reasoning tasks.
Dataset
-
Dataset Composition and Sources: The authors introduce Holi-Spatial-4M, a fully automated, large-scale dataset derived from raw video streams sourced from ScanNet, ScanNet++, and DL3DV-10K. This collection represents the first large-scale 3D semantic dataset constructed without human intervention, featuring over 12,000 optimized 3D Gaussian Splatting (3DGS) scenes.
-
Key Details for Each Subset: The dataset contains more than 4 million high-quality spatial annotations, including 1.3 million 2D instance masks, 320,000 3D bounding boxes, 320,000 detailed instance captions, and 1.2 million 3D grounding instances. It supports open-vocabulary diversity by leveraging Vision-Language Models to annotate a vast array of fine-grained indoor items rather than relying on a closed set of categories.
-
Usage in Model Training: The authors utilize the data to fine-tune Vision-Language Models for robust spatial reasoning. The 1.25 million generated Spatial Question-Answering pairs are structured into a comprehensive taxonomy covering Camera-centric tasks (such as rotation and movement direction) and Object-centric tasks (including object-to-object distance and size measurement).
-
Processing and Construction Details: The pipeline converts raw video inputs into holistic 3D spatial annotations through geometric optimization and scene-level refinement stages. This automated process generates multi-level supervision ranging from geometrically accurate 3DGS reconstructions with rendered depth maps to object-level and relational semantic annotations, ensuring a balanced distribution of tasks for holistic 3D space understanding.
Method
The authors present Holi-Spatial, a fully automated pipeline designed to transform raw video inputs into high-fidelity 3D geometry and comprehensive spatial annotations. As illustrated in the framework overview, the system supports multi-modal tasks ranging from 3D object detection and reconstruction to spatial reasoning and 3D grounding, ultimately generating over 4 million labels.
The curation framework consists of three core stages. The first stage, Geometric Optimization, distills raw video streams into robust 3D structures. The authors first employ Structure-from-Motion to resolve camera intrinsics and extrinsics, followed by leveraging a spatial foundation model to initialize a dense point cloud. To address noise and outliers inherent in feed-forward depth estimations, the method incorporates 3D Gaussian Splatting (3DGS) for per-scene optimization. This process integrates geometric regularization to enforce multi-view depth consistency, effectively eliminating large-scale floaters that would otherwise interfere with 3D bounding box generation.
The second stage, Image-level Perception, extracts spatially consistent object labels. Keyframes are uniformly sampled from the video stream, and a Vision-Language Model (VLM) generates captions while maintaining a dynamic class-label memory to ensure semantic consistency. Guided by these prompts, SAM3 performs open-vocabulary instance segmentation to produce binary masks and confidence scores.
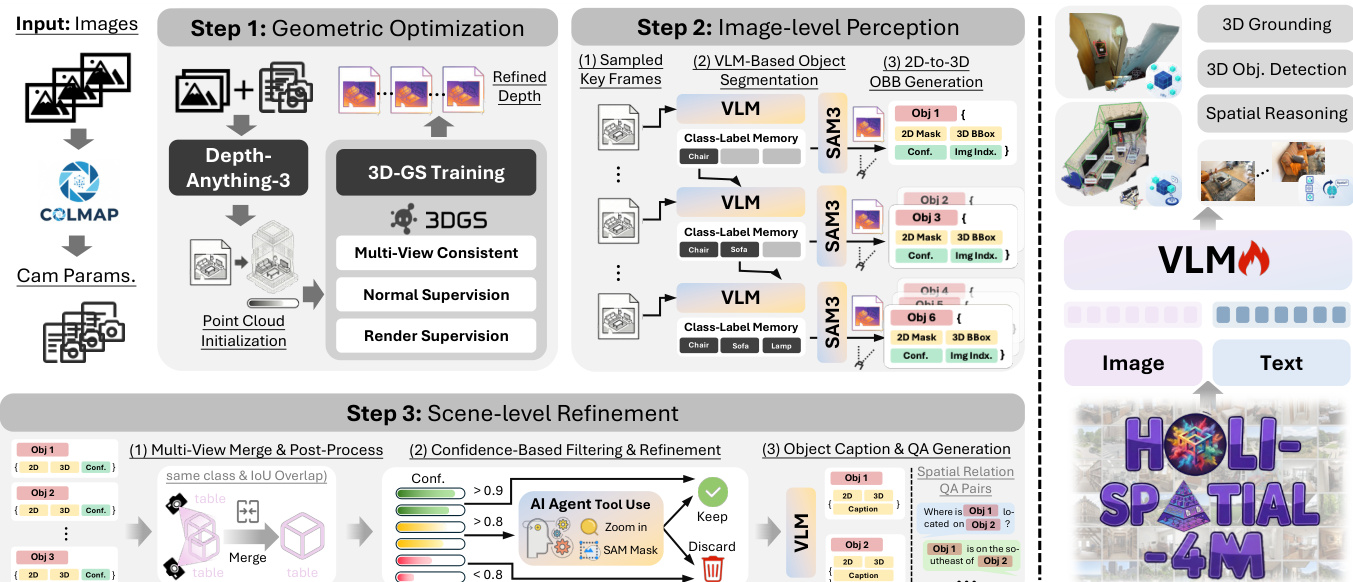
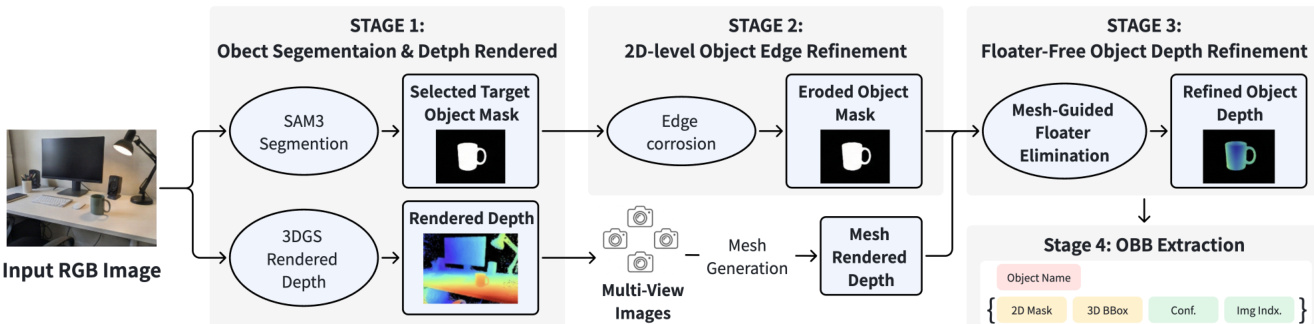
To lift these 2D masks into 3D, the authors unproject pixels using the refined depth map rendered from the optimized 3DGS. The 3D point P is calculated as: P=Dt(u)⋅K−1u~ where K is the camera intrinsic matrix and u~ represents the homogeneous coordinate. To mitigate depth floaters and boundary errors, a geometry-aware filtering strategy is applied. This involves eroding object masks near contours to remove 2D boundary errors and using multi-view-consistent mesh depth to filter 3D outliers, ensuring the estimated initial 3D Oriented Bounding Boxes (OBBs) are derived from a reliable geometry subset.
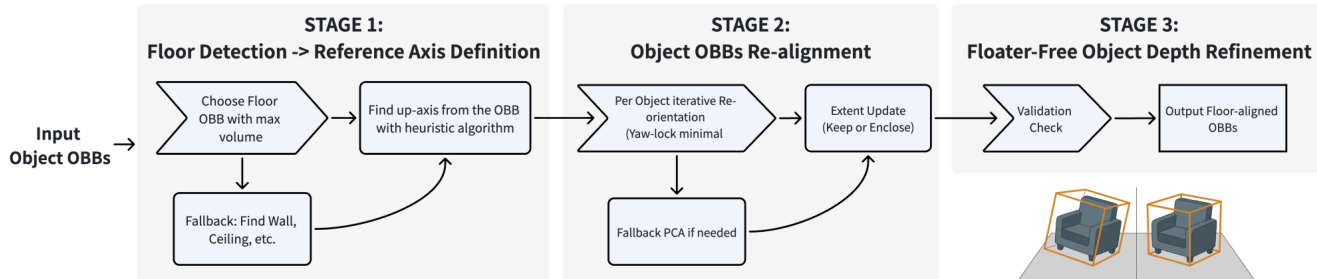
The final stage is Scene-level Refinement. This coarse-to-fine strategy consolidates redundant detections and verifies instances. First, spatial clustering merges instances that share the same category and have sufficient 3D overlap, defined by the condition: ci=cj∧IoU3D(Bi,Bj)>τmerge where τmerge is set to 0.2. Following merging, a post-processing module aligns the 3D OBBs to the global gravity axis. This involves detecting the floor or a fallback planar structure to infer a global up-axis and re-orienting the vertical axis of each instance.
Confidence-based filtering is then applied using a tri-level decision rule. Proposals with high confidence (sk≥0.9) are kept, while low-confidence noise (sk<0.8) is discarded. Ambiguous cases undergo verification by a VLM-based agent equipped with zoom-in and re-segmentation tools.
Upon establishing the final set of validated instances, the system generates dense semantic annotations. It retrieves the optimal source image for each instance and employs a large VLM to generate fine-grained captions and procedurally synthesize spatial QA pairs.
Experiment
- Framework evaluation demonstrates that the proposed method uniquely achieves high-quality performance across 3D object detection, 2D segmentation, and depth estimation simultaneously, outperforming single-modality baselines.
- Qualitative results show the framework produces cleaner 3D geometry with significantly fewer ghosting artifacts and floaters compared to prior works, while generating sharper segmentation boundaries and more accurate 3D bounding boxes.
- VLM finetuning on the curated dataset substantially improves spatial reasoning and 3D grounding capabilities, effectively eliminating viewpoint bias and enabling reliable object localization across different views and depths.
- Ablation studies confirm that geometric training with refined depth is critical for preventing instance fragmentation and false merging caused by occlusions or depth artifacts.
- The combination of confidence filtering and agent-based verification successfully balances precision and recall by removing false positives while recovering challenging instances that might otherwise be discarded.
- Multi-view merging is validated as essential for correcting image-level instance fragmentation and ensuring spatial consistency, leading to robust detection across diverse indoor scenes.