Command Palette
Search for a command to run...
مجموعة بيانات إعادة رسم خريطة حركة الروبوت العالمية OmniRetarget
التاريخ
الحجم
رابط الورقة البحثية
الترخيص
MIT
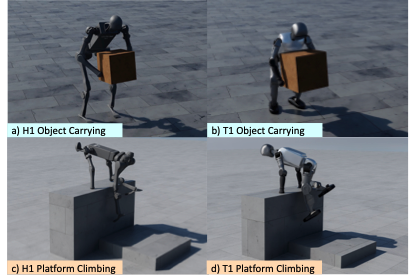
OmniRetarget هي مجموعة بيانات مسارات عالية الجودة لإعادة رسم خريطة حركة الجسم بالكامل للروبوتات البشرية، صدرت عام ٢٠٢٥ من قِبل أمازون ومعهد ماساتشوستس للتكنولوجيا وجامعة كاليفورنيا، بيركلي، ومؤسسات أخرى. نتائج البحث ذات الصلة هي:OmniRetarget: توليد بيانات تحافظ على التفاعل للتحكم في حركة الجسم البشري بالكامل والتفاعل مع المشهد". تحتوي مجموعة البيانات هذه على مسارات حركة الروبوت البشري G1 أثناء تفاعله مع الأجسام والتضاريس المعقدة، وتغطي ثلاثة سيناريوهات: حمل الأجسام، والمشي على التضاريس، والتفاعل المختلط بين الأجسام والتضاريس. نظرًا لقيود الترخيص، لا تتضمن مجموعة البيانات العامة النسخة المُعاد رسمها من LAFAN1. تُقسّم مجموعة البيانات إلى ثلاث مجموعات فرعية، بإجمالي حوالي أربع ساعات من بيانات مسارات الحركة. التركيبة المحددة هي كما يلي:
- روبوت-كائن: مسار الروبوت الذي يحمل الكائن، المستمد من بيانات OMOMO 3.0؛
- تضاريس الروبوت: مسار حركة الروبوت على التضاريس المعقدة، الذي تم إنشاؤه بواسطة MoCap الداخلي، والذي يستمر لمدة 0.5 ساعة تقريبًا؛
- robot-object-terrain: مسار حركة يشمل كل من الكائن والتضاريس، ويبلغ طوله حوالي 0.5 ساعة.
- بالإضافة إلى ذلك، تحتوي مجموعة البيانات أيضًا على دليل نماذج، والذي يوفر ملفات نماذج مرئية بتنسيقات URDF وSDF وOBJ للعرض بدلاً من التدريب.
تُخزَّن بيانات مسار الحركة بصيغة .npz. يحتوي كل مسار على حقلين: معدل الإطارات (fps) وحالة النظام (qpos).
مثال لمجموعة البيانات
الاستشهاد
@inproceedings{Yang2025OmniRetarget,
title={OmniRetarget: Interaction-Preserving Data Generation for Humanoid Whole-Body Loco-Manipulation and Scene Interaction},
author={Yang, Lujie and Huang, Xiaoyu and Wu, Zhen and Kanazawa, Angjoo and Abbeel, Pieter and Sferrazza, Carmelo and Liu, C. Karen and Duan, Rocky and Shi, Guanya},
booktitle={arXiv},
year={2025}
}
بناء الذكاء الاصطناعي بالذكاء الاصطناعي
من الفكرة إلى الإطلاق — سرّع تطوير الذكاء الاصطناعي الخاص بك مع المساعدة البرمجية المجانية بالذكاء الاصطناعي، وبيئة جاهزة للاستخدام، وأفضل أسعار لوحدات معالجة الرسومات.