Command Palette
Search for a command to run...
مجموعة بيانات تحديد المواقع والتعيين المتزامن لـ TUM RGB-D
التاريخ
المؤسسة
عنوان URL للنشر
رابط الورقة البحثية
الترخيص
CC BY 4.0
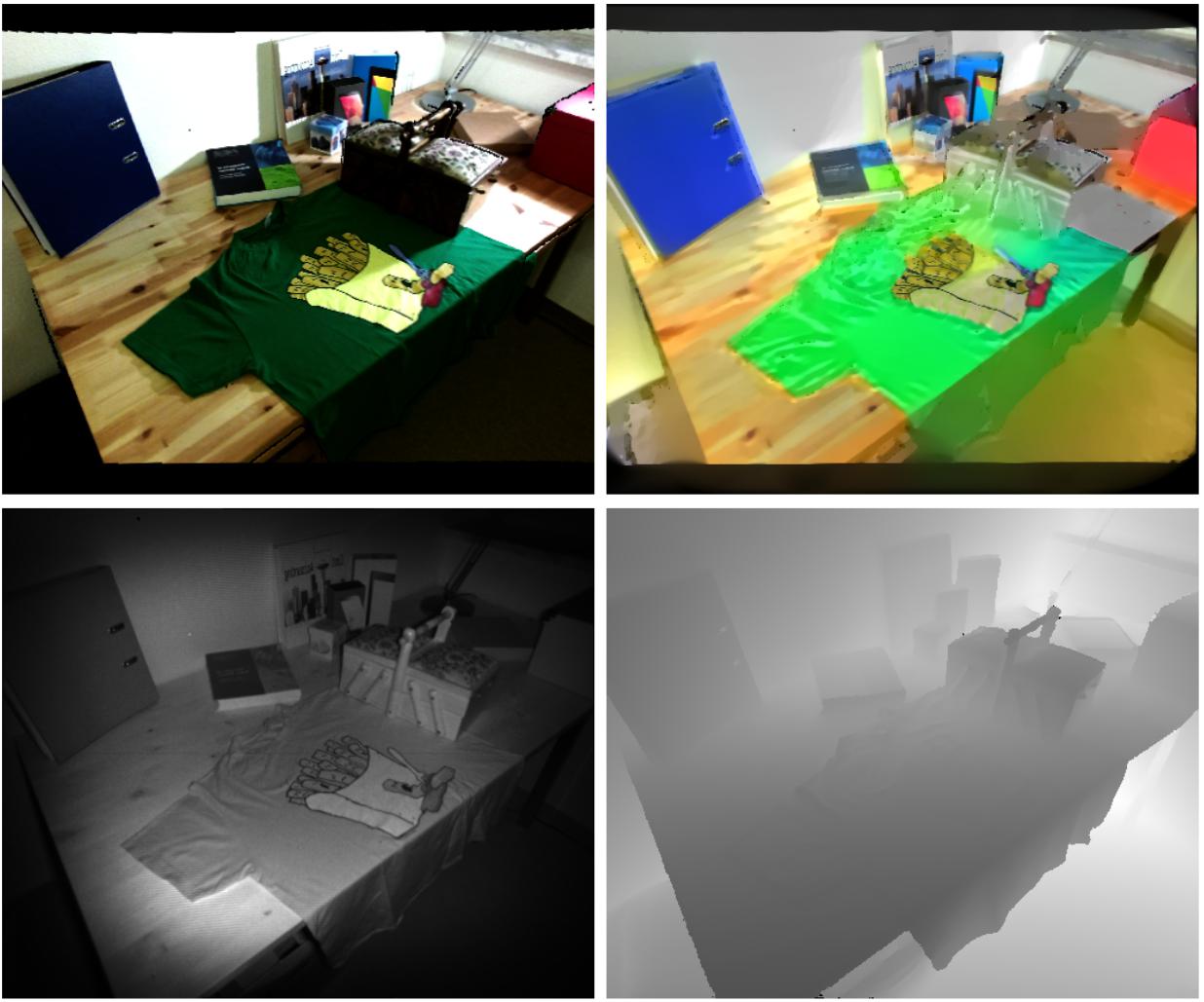
TUM RGB-D عبارة عن مجموعة بيانات RGB-D تحتوي على صور ملونة وعميقة تم تسجيلها بواسطة مستشعر Microsoft Kinect على طول مسار الحقيقة الأرضية للمستشعر. تم تسجيل البيانات بمعدل إطار كامل (30 هرتز) ودقة المستشعر (640 × 480 بكسل). تم الحصول على مسارات الحقيقة الأساسية من خلال نظام التقاط الحركة عالي الدقة مع ثماني كاميرات تتبع عالية السرعة (100 هرتز). تتكون مجموعة البيانات من 39 تسلسلًا تم تسجيلها باستخدام مستشعر Microsoft Kinect في مشاهد داخلية مختلفة، بما في ذلك الاختبار والتصحيح، وSlam المحمولة، وSlam الروبوت، والبنية مقابل الملمس، والأشياء الديناميكية، وإعادة بناء الأشياء ثلاثية الأبعاد، وملفات التحقق، وملفات المعايرة، وهي مجموعات بيانات لمهام مختلفة. تحتوي كل فئة على بيانات متعددة ويمكن استخدامها لاختبار أداء المهام المختلفة.
بناء الذكاء الاصطناعي بالذكاء الاصطناعي
من الفكرة إلى الإطلاق — سرّع تطوير الذكاء الاصطناعي الخاص بك مع المساعدة البرمجية المجانية بالذكاء الاصطناعي، وبيئة جاهزة للاستخدام، وأفضل أسعار لوحدات معالجة الرسومات.