Command Palette
Search for a command to run...
{Fei-Yue Wang Peijun Ye Yisheng Lv Fenghua Zhu Qiulei Dong Siqi Fan}
초록
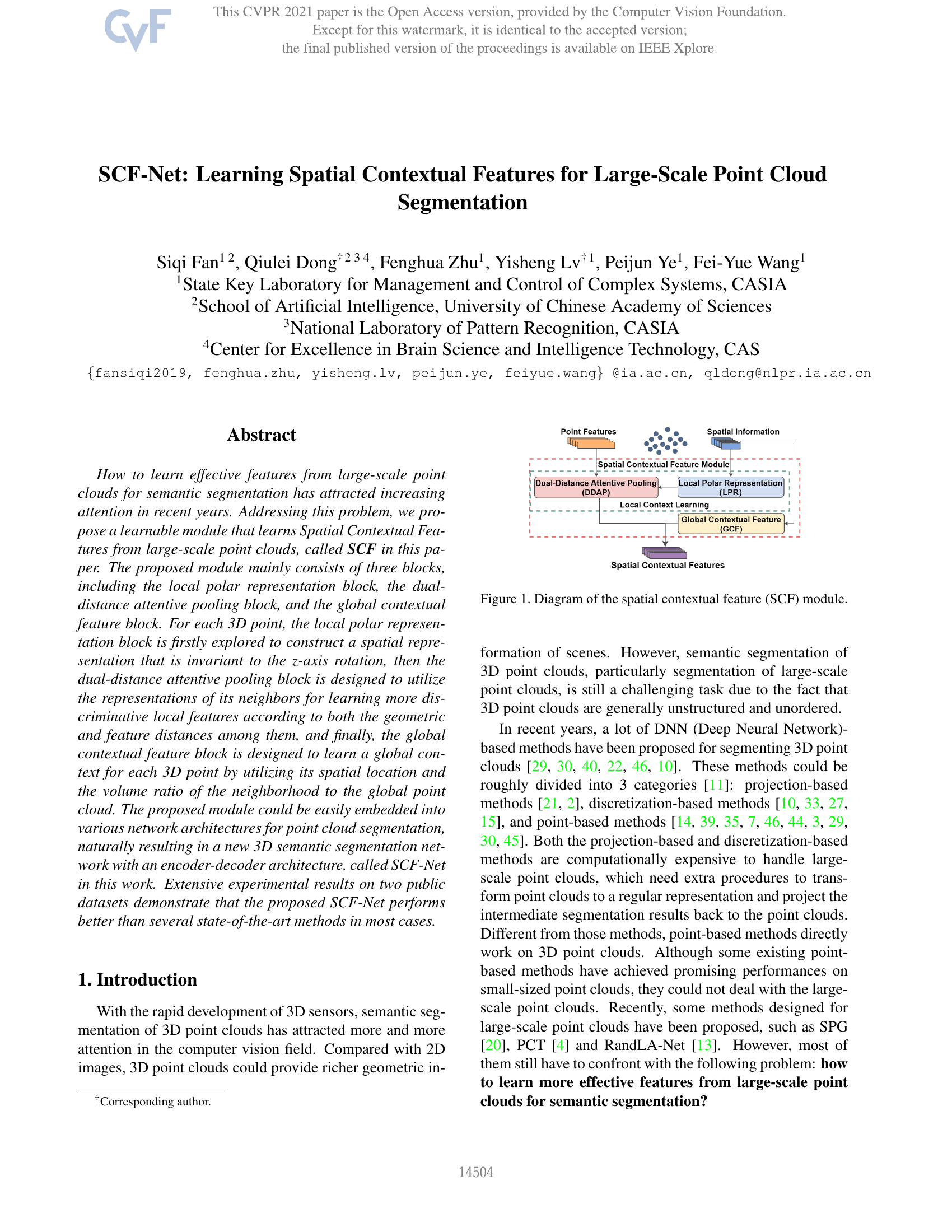
최근 몇 년간 대규모 포인트 클라우드에서 효과적인 특징을 학습하는 방법에 대한 관심이 점점 증가하고 있다. 이 문제를 해결하기 위해 본 논문에서는 대규모 포인트 클라우드로부터 공간적 맥락 특징(Spatial Contextual Features)을 학습할 수 있는 학습 가능한 모듈을 제안한다. 이 모듈은 본 논문에서 SCF( Spatial Contextual Feature)라고 명명한다. 제안된 모듈은 주로 세 가지 블록으로 구성되며, 각각 로컬 폴라 표현 블록(Local Polar Representation Block), 이중 거리 주의 풀링 블록(Dual-Distance Attentive Pooling Block), 그리고 글로벌 맥락 특징 블록(Global Contextual Feature Block)이다. 각 3D 포인트에 대해, 먼저 로컬 폴라 표현 블록을 통해 z축 회전에 불변(invariant)한 공간 표현을 구성하고, 그 다음 이중 거리 주의 풀링 블록을 설계하여 이웃 포인트들 간의 기하학적 거리와 특징 거리에 기반해 보다 구분력 있는 국소적 특징을 학습한다. 마지막으로 글로벌 맥락 특징 블록은 각 3D 포인트의 공간적 위치와 이웃 영역의 점 클라우드 전체에 대한 부피 비율을 활용하여 글로벌 맥락 정보를 학습한다. 제안된 모듈은 다양한 네트워크 아키텍처에 쉽게 통합될 수 있으며, 인코더-디코더 구조를 가진 새로운 3D 세그멘테이션 네트워크인 SCF-Net을 자연스럽게 도출할 수 있다. 두 개의 공개 데이터셋에서 실시한 광범위한 실험 결과를 통해, 제안된 SCF-Net이 대부분의 경우 기존의 최첨단 방법들보다 우수한 성능을 보임을 확인하였다.
벤치마크
| 벤치마크 | 방법론 | 지표 |
|---|---|---|
| 3d-semantic-segmentation-on-sensaturban | SCF-Net | mIoU: 55.1 |
| 3d-semantic-segmentation-on-stpls3d | SCF-Net | mIOU: 50.65 |
| 3d-semantic-segmentation-on-toronto-3d | SCF-Net | OA: 95.50 mIoU: 73.60 |
| semantic-segmentation-on-s3dis | SCF-Net | Mean IoU: 71.6 Number of params: N/A mAcc: 82.7 oAcc: 88.4 |
| semantic-segmentation-on-s3dis-area5 | SCF-Net | Number of params: N/A mAcc: 71.8 mIoU: 63.7 oAcc: 87.2 |
| semantic-segmentation-on-semantic3d | SCF-Net | mIoU: 77.6% oAcc: 94.7% |