HyperAI
Command Palette
Search for a command to run...
옥스포드 레이더 로봇카 레이더 데이터 세트
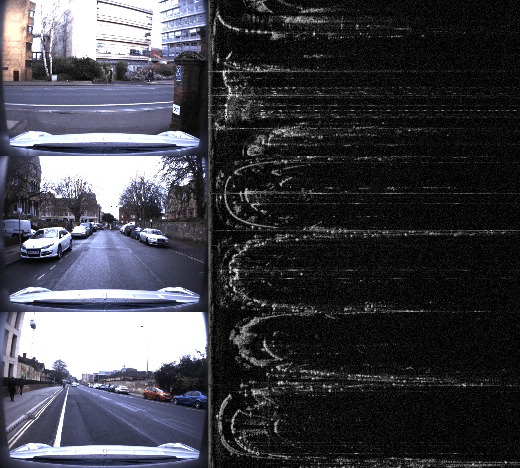
Oxford Radar RobotCar는 Oxford RobotCar 데이터 세트의 레이더 확장 데이터 세트입니다. 이 데이터는 영국 옥스퍼드 중심부의 경로를 관찰하여 얻었습니다. 이 데이터는 2019년 1월에 옥스퍼드 시내 중심가를 통과하는 32회 주행 경로에 대해 수집되었으며, 총 주행 거리는 280km입니다. 데이터 세트에는 다양한 날씨, 교통, 조명 조건이 포함되어 있습니다. 이 데이터 세트의 센서 유형 및 데이터 크기:
- Navtech CTS350-X 레이더에서 240,000회 스캔
- Dual Velodyne HDL-32E LIDAR를 통한 240만 건의 스캔
- 6개의 카메라, 2개의 2D LIDAR, GPS/INS 수신기
- 지상 진실 최적화 레이더 거리 측정 방법
이 데이터셋은 커뮤니티 사용자가 기여한 것이며 교육 및 정보 제공 목적으로만 사용됩니다. 저작권 침해와 관련된 콘텐츠가 있는 경우 [email protected]로 문의하시면 신속하게 검토 및 삭제 처리하겠습니다.