Command Palette
Search for a command to run...
近未来の方策最適化
近未来の方策最適化
Chuanyu Qin Chenxu Yang Qingyi Si Naibin Gu Dingyu Yao Zheng Lin Peng Fu Nan Duan Jiaqi Wang
概要
検証可能な報酬を用いた強化学習(RLVR: Reinforcement Learning with Verifiable Rewards)は、ポストトレーニングにおける中核的な手法となっています。適切なoff-policyの軌跡(trajectories)をon-policyの探索に導入することは、RLVRの収束を加速させ、パフォーマンスの天井を引き上げる効果がありますが、そのような軌跡の供給源を見つけることが依然として主要な課題となっています。既存の混合ポリシー(mixed-policy)手法は、外部の教師モデルから軌跡をインポートする(高品質だが分布が遠い)、あるいは過去のトレーニング軌跡をリプレイする(分布は近いが品質に限界がある)かのいずれかであり、有効な学習信号 S=Q/V を最大化するために必要な「十分に強力であること(より高い Q、より多くの新規知識の学習)」と「十分に近似していること(より低い V、より容易な吸収)」の両条件を同時に満たすことはできません。本論文では、Near-Future Policy Optimization(NPO)を提案します。これは、ポリシー自身の「近い未来の自己」から学習するシンプルな混合ポリシー・スキームです。具体的には、同一のトレーニングランにおける後続のチェックポイントを補助的な軌跡の自然な供給源として利用します。これにより、現在のポリシーよりも強力でありながら、いかなる外部ソースよりも分布が近い軌跡を得ることができ、軌跡の品質と分散コスト(variance cost)のバランスを直接的に最適化することが可能になります。我々は、初期段階のブートストラップ(early-stage bootstrapping)と、後期段階のプラトー打破(late-stage plateau breakthrough)という2つの手動介入を通じてNPOの有効性を検証しました。さらに、オンラインのトレーニング信号に基づいて介入を自動的にトリガーし、S を最大化するガイド用チェックポイントを選択する適応型バリアントであるAutoNPOを提案します。GRPOを用いたQwen3-VL-8B-Instructによる実験では、NPOは平均パフォーマンスを57.88から62.84へと向上させ、AutoNPOはこれを63.15まで引き上げました。これにより、収束を加速させつつ、最終的なパフォーマンスの天井を押し上げることが実証されました。
One-sentence Summary
To accelerate reinforcement learning with verifiable rewards, researchers propose Near-Future Policy Optimization (NPO), a mixed-policy scheme that maximizes the effective learning signal by utilizing a model's own later checkpoints as auxiliary trajectories to balance trajectory quality against variance cost.
Key Contributions
- The paper introduces Near-Future Policy Optimization (NPO), a mixed-policy scheme that utilizes trajectories from a later checkpoint in the same training run to guide the current policy. This approach provides auxiliary trajectories that are stronger than historical replay while remaining closer to the current distribution than external teacher models, effectively balancing trajectory quality against variance.
- This work presents AutoNPO, an adaptive variant that automates the timing and selection of guidance by monitoring online training signals such as reward stagnation and entropy decline. The framework automatically triggers interventions and selects the specific guide checkpoint that maximizes an empirical estimate of the effective learning signal.
- Experimental results demonstrate the effectiveness of NPO through successful manual interventions in early-stage bootstrapping and late-stage plateau breakthrough scenarios. The method shows the ability to bridge mixed-policy RLVR and self-taught approaches by using optimization time as privileged information to improve convergence and performance.
Introduction
Reinforcement learning with verifiable rewards (RLVR) is a critical post-training method for enhancing reasoning capabilities in large language models. While pure on-policy exploration is standard, it often suffers from sparse correct trajectories in early training or hits performance plateaus in later stages. Existing mixed-policy approaches attempt to solve this by either using external teachers, which introduce high distributional variance, or replaying past trajectories, which are limited by the quality of older checkpoints. The authors leverage a temporal approach called Near-Future Policy Optimization (NPO) to bridge this gap. By using a later checkpoint from the same training run as a source of auxiliary trajectories, NPO provides a learning signal that is both stronger than the current policy and closer in distribution than external models. This effectively balances signal quality against variance cost, allowing for accelerated convergence and higher performance ceilings.
Method
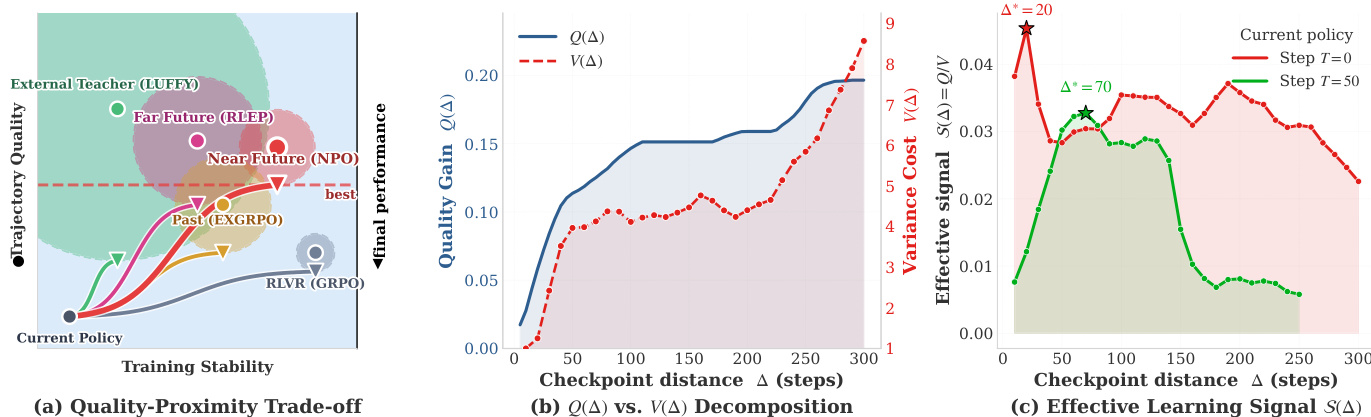
The authors propose Near-Future Policy Optimization (NPO), a method that enhances reinforcement learning with verification (RLVR) by leveraging trajectories from a near-future checkpoint of the same training run to guide the current policy. The core insight is that the effectiveness of off-policy guidance is governed by a trade-off between trajectory quality and variance cost. Trajectory quality Q(Δ), which measures the fraction of prompts the source policy can solve correctly, increases with the checkpoint distance Δ from the current policy. In contrast, variance cost V(Δ), which arises from importance weighting when combining trajectories from different policies, grows approximately exponentially with Δ. The effective learning signal S(Δ)=Q(Δ)/V(Δ) thus exhibits a U-shape, peaking at an optimal checkpoint distance Δ∗ that balances these competing factors. As shown in the figure below, existing approaches such as far-future replay, past-trajectory replay, and external teachers occupy suboptimal regions of the quality-stability trade-off plane, while NPO targets the high-S region by using a near-future policy that is both strong and close in distribution to the current policy.
The NPO framework modifies the standard RLVR training loop by introducing a selective guidance mechanism. At a training step t with current policy π(t), the method trains an additional Δ steps to obtain a near-future checkpoint π(t+Δ). It then rolls back to step t and uses π(t+Δ) to supply guidance trajectories for prompts where the current policy struggles. Specifically, for a prompt x, the current policy samples a group of n on-policy trajectories {oi}i=1n. The on-policy pass-rate p^(x) is computed, and if p^(x) is below a threshold τgate and a verified-correct guidance trajectory ox′ exists in a pre-computed cache, the n-th slot of the rollout group is replaced by ox′. The resulting group GNPO(x) is used to compute group-relative advantages and update the policy via a clipped objective, with importance sampling correction applied only to the guidance slot. This process is implemented in a way that incurs no extra rollout cost during the NPO segment, as the guidance trajectories are cached offline.
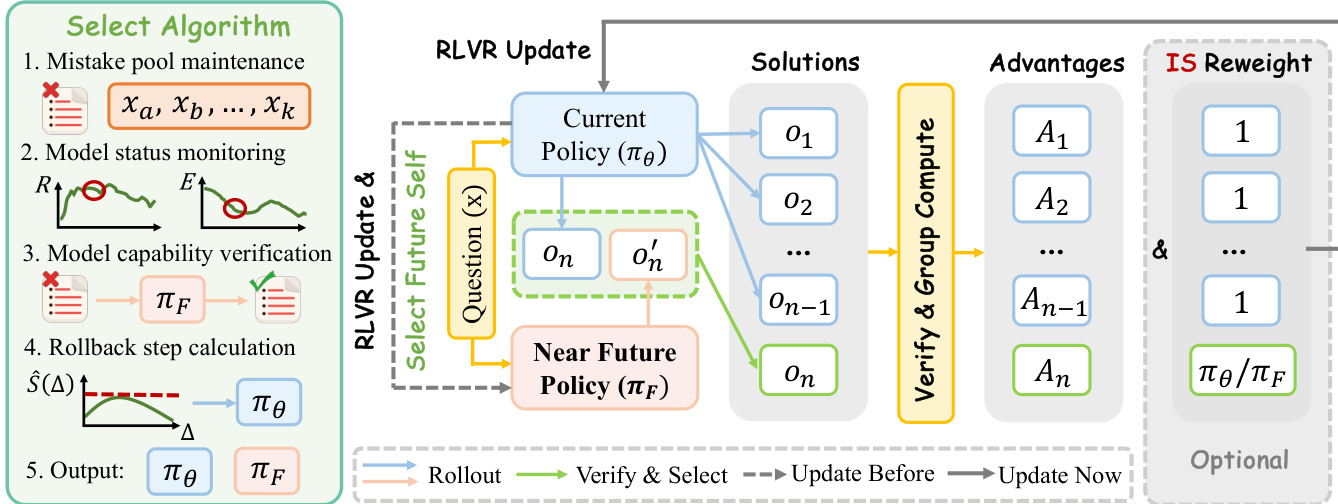
To validate the approach, the authors introduce two manual interventions: early-stage bootstrapping and late-stage plateau breakthrough. The early intervention uses a short scout segment to generate a near-future checkpoint that guides the initial training phase, accelerating convergence from a cold-start regime. The late intervention uses a checkpoint from beyond a performance plateau to guide the replay of the plateaued segment, enabling the policy to break through its on-policy ceiling. These interventions demonstrate that near-future guidance is beneficial across different training stages. Building on this, the authors propose AutoNPO, an adaptive variant that automates the intervention process. AutoNPO maintains a mistake pool of prompts failed by the current policy and uses online signals from training logs to determine when to intervene and how far to roll back. The intervention trigger is based on a combination of reward stagnation and entropy drop, while the rollback distance is selected by maximizing an empirical estimate of the effective learning signal S^(Δ)=Q^(Δ)/V^(Δ), where Q^(Δ) is the pass-rate of the current policy on prompts failed during the segment starting at t−Δ, and V^(Δ) is a variance proxy estimated from the per-token KL divergence between the current and the rollback policy. This adaptive controller reuses existing training signals and avoids substantial overhead, enabling a plug-and-play, objective-preserving improvement over standard RLVR.
Experiment
The researchers evaluated NPO and its variants against several reinforcement learning baselines across eight multimodal reasoning benchmarks to validate the effectiveness of targeted trajectory interventions. The results demonstrate that NPO, particularly the automated version, outperforms existing methods by providing timely guidance that prevents premature policy collapse and maintains healthy exploration. By strategically injecting high-quality trajectories, the approach successfully breaks through performance plateaus and achieves superior reasoning depth without requiring complex importance-sampling corrections.
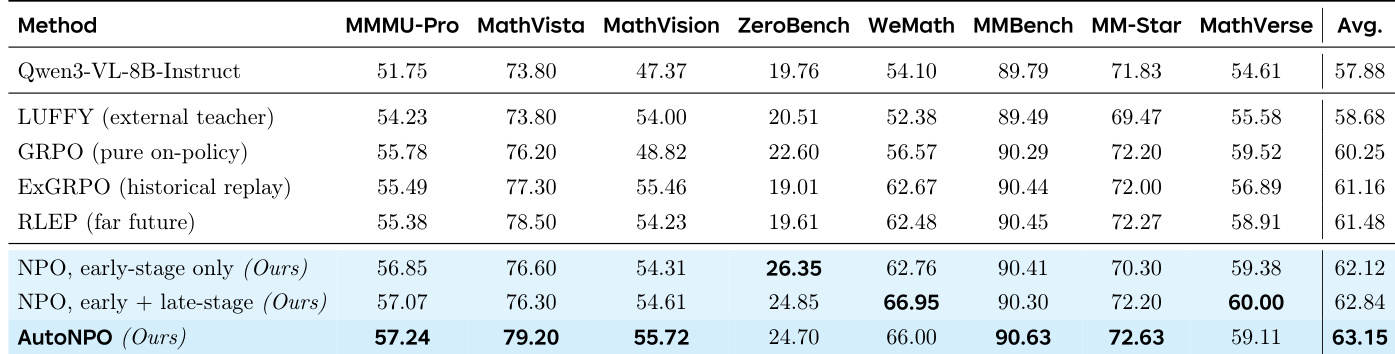
The authors evaluate their NPO method against several baselines on multimodal reasoning benchmarks, showing that both manual and automated NPO variants consistently outperform existing reinforcement learning approaches. AutoNPO achieves the highest average accuracy and leads on multiple individual tasks, demonstrating that targeted interventions improve training dynamics without requiring exact importance-sampling correction. The results indicate that NPO's near-policy guidance enables effective, stable improvements while preserving exploration and avoiding premature policy collapse. AutoNPO achieves the highest average accuracy and leads on multiple benchmarks, outperforming all baselines including GRPO and replay-based methods. NPO maintains higher policy entropy throughout training, preventing premature collapse and supporting a higher late-stage performance ceiling. The importance-sampling correction is not necessary for NPO due to its near-policy guidance, simplifying the method without sacrificing gains.
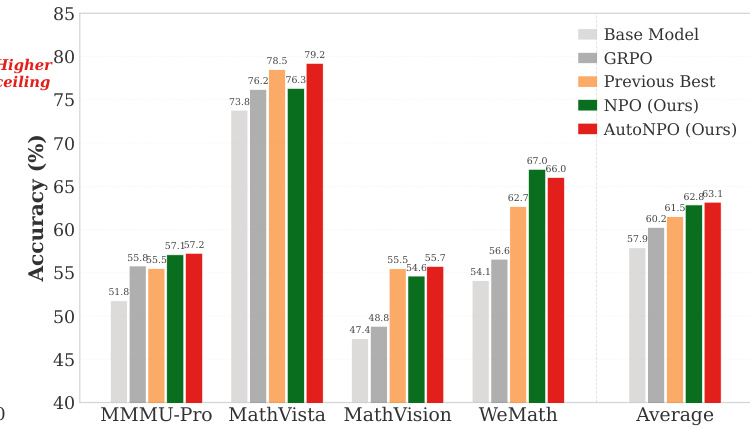
The authors evaluate NPO and its variants against several baselines on multimodal reasoning benchmarks, using Qwen3-VL-8B-Instruct as the base model. Results show that NPO methods, particularly AutoNPO, achieve higher average performance than all baselines, with improvements driven by targeted interventions that enhance training dynamics and maintain policy exploration. NPO variants outperform all baselines across multiple benchmarks, with AutoNPO achieving the highest overall score. AutoNPO improves training dynamics by maintaining higher policy entropy and avoiding premature collapse through targeted interventions. The importance-sampling correction is found to be unnecessary in NPO due to its near-policy guidance, simplifying implementation without sacrificing performance.
The authors evaluate the NPO method and its variants against several reinforcement learning baselines using multimodal reasoning benchmarks with a Qwen3-VL base model. The experiments demonstrate that NPO, particularly the automated AutoNPO variant, consistently outperforms existing approaches by enhancing training dynamics through targeted interventions. These results suggest that near-policy guidance effectively maintains policy entropy and prevents premature collapse, allowing for stable improvements without the need for complex importance-sampling corrections.