Command Palette
Search for a command to run...
Diffusion ベースの Discrete Motion Tokenizer による意味条件と運動学的条件の橋渡し
Diffusion ベースの Discrete Motion Tokenizer による意味条件と運動学的条件の橋渡し
Chenyang Gu Mingyuan Zhang Haozhe Xie Zhongang Cai Lei Yang Ziwei Liu
概要
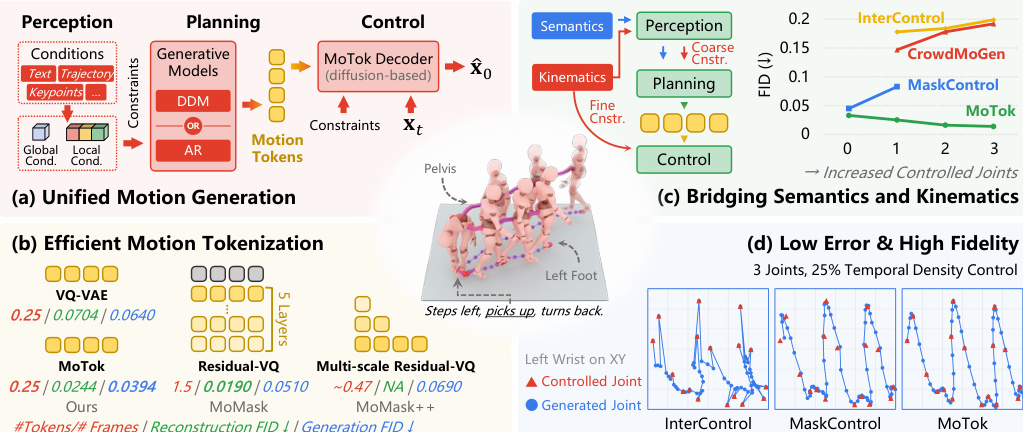
既存の運動生成手法は主に二つのパラダイムに従っています。一つは運動学的制御に優れた連続拡散モデル、もう一つは意味的条件付けに効果的な離散トークンベースの生成モデルです。両者の長所を統合するため、本研究では3段階のフレームワークを提案します。すなわち、条件特徴抽出(Perception)、離散トークン生成(Planning)、拡散に基づく運動合成(Control)です。このフレームワークの中核をなすのは MoTok(拡散ベースの離散運動トークナイザ)であり、運動の復元を拡散デコーダに委譲することで、意味的抽象化と微細な再構成を解離します。これにより、運動忠実度を維持しつつ、コンパクトな単層トークンの実現が可能となります。運動学的条件については、粗い制約がプランニング段階でのトークン生成を導き、一方、微細な制約は拡散に基づく最適化を通じてコントロール段階で課されます。この設計により、運動学的詳細が意味的トークンプランニングを妨げることを防ぎます。HumanML3D における評価では、本手法は MaskControl に比べて制御性と忠実度が大幅に向上し、かつトークン数を6分の1に削減しました。具体的には、軌道誤差が0.72 cmから0.08 cmへ、FIDが0.083から0.029へと改善されました。また、従来の手法では運動学的制約が強化されると性能が劣化する傾向があるのに対し、本手法は忠実度を向上させ、FIDを0.033から0.014へと低減しました。
One-sentence Summary
Researchers from Nanyang Technological University and The Chinese University of Hong Kong propose MoTok, a diffusion-based discrete motion tokenizer that decouples semantic abstraction from kinematic reconstruction to enable compact tokenization and superior trajectory control in human motion generation.
Key Contributions
- The paper introduces a three-stage Perception-Planning-Control paradigm for controllable motion generation that unifies autoregressive and discrete diffusion planners under a single interface to separate high-level planning from low-level kinematics.
- This work presents MoTok, a diffusion-based discrete motion tokenizer that decouples semantic abstraction from fine-grained reconstruction by delegating motion recovery to a diffusion decoder, enabling compact single-layer tokens with a significantly reduced token budget.
- A coarse-to-fine conditioning scheme is developed to inject kinematic signals as coarse constraints during token planning and enforce fine-grained constraints during diffusion denoising, which experiments on HumanML3D show improves controllability and fidelity while reducing trajectory error from 0.72 cm to 0.08 cm.
Introduction
Human motion generation is critical for applications in animation, robotics, and embodied agents, yet existing methods struggle to balance high-level semantic intent with fine-grained kinematic control. Prior token-based approaches often entangle semantic abstraction with low-level motion details, requiring high token rates and causing performance degradation when strong kinematic constraints are applied. The authors propose a three-stage Perception-Planning-Control framework centered on MoTok, a diffusion-based discrete motion tokenizer that decouples semantic planning from motion reconstruction. By delegating fine-grained recovery to a diffusion decoder and applying kinematic constraints in a coarse-to-fine manner across stages, their method achieves compact single-layer tokenization while significantly improving both controllability and motion fidelity.
Method
The authors propose a unified motion generation framework that bridges the strengths of continuous diffusion models for kinematic control and discrete token-based generators for semantic conditioning. This approach follows a three-stage Perception-Planning-Control paradigm, as illustrated in the overview diagram below.
At the core of this framework is MoTok, a diffusion-based discrete motion tokenizer. Unlike conventional VQ-VAE tokenizers that directly decode continuous motion from discrete codes, MoTok factorizes the representation into a compact discrete code sequence and a diffusion decoder for fine-grained reconstruction. This design allows discrete tokens to focus on semantic structure while offloading low-level details to the diffusion process.
Refer to the detailed architecture diagram below for the specific components of the MoTok tokenizer and the unified generation pipeline.
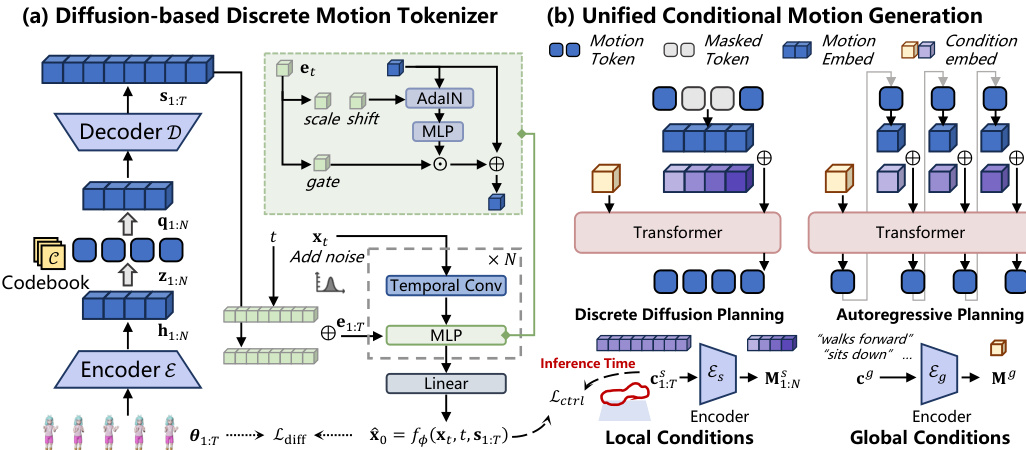
The MoTok tokenizer consists of three primary components. First, a convolutional encoder E(⋅) extracts latent features from the input motion sequence θ1:T through progressive temporal downsampling:
h1:N=E(θ1:T),h1:N∈RN×d,where N is the compressed sequence length and d is the latent dimension. Second, a vector quantizer Q(⋅) maps these latents to a discrete token sequence z1:N by finding the nearest entry in a shared codebook C:
zn=argk∈{1,...,K}min∥hn−ck∥22,qn=czn.Third, instead of direct regression, the decoder employs a conditional diffusion model. A convolutional decoder D(⋅) first upsamples the quantized latents q1:N into a per-frame conditioning signal s1:T. A neural denoiser fϕ then reconstructs the clean motion x^0 from a noisy input xt conditioned on s1:T:
x^0=fϕ(xt,t,s1:T).This diffusion-based decoding provides a natural interface for enforcing fine-grained constraints during the reconstruction phase.
The unified conditional generation pipeline supports both discrete diffusion and autoregressive planners through a shared conditioning interface. Conditions are categorized into global conditions cg (e.g., text descriptions) and local conditions c1:Ts (e.g., target trajectories). Global conditions are encoded into a sequence-level feature Mg, while local conditions are encoded into a token-aligned feature sequence M1:Ns.
During planning in discrete token space, these conditions are injected into the Transformer-based generator. For discrete diffusion planning, a token embedding sequence is constructed where the global condition occupies the first position, and local condition features are added via additive fusion to the motion token positions. For autoregressive planning, the global condition similarly occupies the first position, with local conditions aligned to preceding token positions to preserve temporal causality.
Finally, control is enforced during the diffusion decoding stage. After the discrete tokens are generated, they are decoded into the conditioning sequence s1:T. To ensure adherence to local kinematic constraints, an auxiliary control loss Lctrl is optimized during the denoising process. At each diffusion step k, the motion estimate x^k is refined via gradient descent:
x^k←x^k−η∇x^kLctrl(x^k,c1:Ts),where η controls the refinement strength. This mechanism allows the system to achieve precise low-level control without burdening the discrete planner with high-frequency details.
Experiment
- Controllable motion generation experiments on HumanML3D and KIT-ML validate that MoTok achieves superior trajectory alignment and motion realism compared to baselines, even with significantly fewer tokens.
- Text-to-motion generation tests confirm that MoTok produces higher quality motions with lower FID scores while operating under a reduced token budget, demonstrating efficient semantic planning.
- Ablation studies reveal that diffusion-based decoders outperform convolutional ones by better recovering fine-grained motion details under noisy generation conditions.
- Configuration analysis shows that moderate temporal downsampling and specific kernel sizes optimize the balance between reconstruction quality and planning stability.
- Dual-path conditioning experiments prove that injecting low-level control signals in both the generator and decoder is essential for achieving high fidelity and precise constraint adherence.
- Two-stage training evaluations demonstrate that MoTok tokens encode richer semantic information and allow for better detail recovery than standard VQ-VAE approaches.
- Efficiency comparisons highlight that MoTok generates sequences substantially faster than competing methods while maintaining high performance.